 8位微控制器的多功能性與工業照明中的應用
8位微控制器的多功能性與工業照明中的應用
許多人認為價格合理的16位和32位微控制器的增長可能會導致8位MCU的終結。然而,近年來,由于M2M型應用的普及,推動了8位產品的理想用途。隨著物聯網預計在未來幾年迅速增長,8位產品似乎可以找到越來越多的市場。
這種復興令人興奮的是8位部件的多功能性。無論應用是什么,如果需要少量處理能力,可以有一個8位單元來滿足要求。物聯網注定要在網絡邊緣看到對此類處理的更多要求,其中設備很小但任務同樣重要。這是8位微控制器蓬勃發展的完美環境。
示例和應用程序本文將介紹三個非常不同的示例,這些示例展示了8位微控制器的這種多功能性。在第一種情況下,它將研究STMicroelectronics的STM8S207如何提供形成智能卡接口所需的解碼。然后,本文將展示Microchip的PIC16F1947如何幫助控制商業和工業建筑中的照明。最后,本文將考慮Atmel ATTiny20微控制器如何在智能手機和其他無線設備中提供接近傳感器所需的處理。
智能卡接口
使用STMicroelectronics的STM8S207的智能卡模式,可以開發基于智能卡的應用程序,使用減少的固件和硬件資源。 STM8S207是一款24 MHz 8位MCU,具有高達128 kby的閃存,集成EEPROM,10位模數轉換器,定時器和兩個UART,具有SPI,I2C和CAN接口。
該應用程序使用設備的UART1智能卡模式,該模式支持ISO 7816-3 A類中描述的異步協議智能卡,其中包括工作在5 V的卡;工作在3 V的設備被歸類為B類,而1.8 V的設備則歸類為C類。該標準描述了智能卡和讀卡器之間的關系,指的是智能卡本身,而主設備指的是讀卡器。通信開始由讀卡器發信號通知智能卡,并在智能卡響應時繼續。通信通道是單線程的,因為一旦讀取器向智能卡發送命令,它就會被阻塞,直到收到響應。
啟用智能卡模式后,UART1必須配置為8個數據位加奇偶校驗和0.5或1.5個停止位。 5位預分頻器和智能卡時鐘發生器為智能卡提供時鐘。 GPIO引腳和軟件提供了與智能卡接口所需的其余功能。
ISO 7816-3以基本時間單位(ETU)定義了異步協議的位定時器。這些與輸入卡的時鐘頻率有關。 ETU的長度是一點時間。 UART1發送器輸出和接收器輸入在內部連接。要將數據從STM8S207傳輸到智能卡,必須在智能卡模式下設置UART1。
智能卡時鐘發生器為連接的智能卡提供時鐘信號。智能卡使用此時鐘為智能卡和另一個UART1之間的串行I/O獲取波特率時鐘。時鐘也用于卡中的CPU(如果存在)。智能卡接口的操作要求在卡中的CPU運行代碼時調整卡的時鐘速率,以便可以改變波特率或增加卡的性能。時鐘用作智能卡的CPU時鐘,因此微控制器時鐘速率的更新必須與智能卡時鐘同步。時鐘高或低脈沖寬度不得短于舊的或新的編程值。
3和5 V智能卡需要模擬接口。在此應用中,ST8024用于此目的,并放置在智能卡和STM8S207之間。該接口如圖1所示。
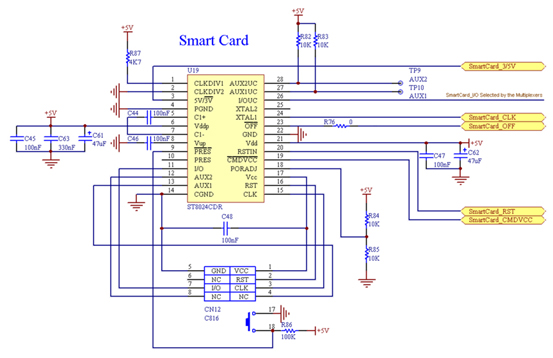
圖1:智能卡接口硬件連接。
通過查看奇偶校驗位對每個字節執行錯誤處理。如果這與傳輸數據的奇偶校驗不對應,則必定發生錯誤。接收方將發出信號,表示它希望重新傳輸該字節。這是通過將I/O線保持為低電平而不是正常高電平來完成的。當發送方檢測到這一點時,它重新發送該字節。通過從卡發送到讀卡器的數據,STM8S207可以通過在停止位期間下拉數據線來檢測硬件接收數據的奇偶校驗錯誤。利用從讀卡器發送到卡的數據,智能卡下拉I/O線以發出奇偶校驗已發生的信號。在這種情況下,STM8S207通過軟件檢測到幀錯誤。智能卡庫檢查是否發生了奇偶校驗錯誤,如果是,則對其進行管理在從微控制器向卡發送一個字節后,智能卡捕獲在I/O線上發送的數據。如果從卡中檢測到奇偶校驗錯誤,則在停止位期間下拉I/O線。發生幀錯誤事件,并且錯誤處理功能重新發送最后一個數據。
當卡首次插入讀卡器時,電源不會應用于觸點,因為如果電源通過錯誤的觸點,卡的芯片可能會損壞。只有在邊緣檢測器確定卡與接觸點正確對齊后才會啟動電源。然后,在將復位信號發送到卡之前,使觸點進入相干空閑狀態。盡管有些微處理器在I/O狀態下工作在3 V,但始終會施加5 V的初始電壓設置。 I/O觸點在閱讀器側設置為接收模式,并應用穩定時鐘。復位線處于低電平狀態,在讀取器啟動有效復位序列之前,復位線必須保持至少40,000個時鐘周期,從而將復位線提升到高電平狀態。讀卡器和卡之間的數據傳輸通過時鐘和I/O線的協同作用進行。
工業和商業照明控制
尋找控制商業和工業建筑照明的標準方法導致了在歐洲創建DALI - 數字可尋址照明接口。這是用于形成照明控制網絡的開放標準,作為建筑物自動化系統的一部分。典型的DALI網絡由控制器和各種照明設備組成,例如電子鎮流器和調光器。控制器通過雙向數據交換監視和控制每個燈.DALI型鎮流器可以比標準電感鎮流器運行更低的功率水平,因此對工業和商業領域的技術感興趣。
通過雙線串行總線,控制器發送16位曼徹斯特編碼數據包,鎮流器使用8位數據包進行響應。系統中可以有多個控制器,并且有64個通道(單獨地址)用于連接到一個接口線的鎮流器。
與模擬系統不同,DALI不需要硬連線電源電路控制組。單個鎮流器尋址與數字開關的組合消除了垂直開關布線。 DALI有自由形式的布局。允許使用菊花鏈,星形拓撲和多點放大,以及兩個或多個拓撲結構的組合。
DALI的物理低電平或有源狀態定義為接口電壓低于9.5 V.高電平條件或DALI空閑,是9.5和22.5 V之間的接口電壓,最常見的是16 V.最大系統電流限制在250 mA。限流器電路的響應時間小于10μs。連接到接口的每個組件最多可消耗2 mA。連接器在接收器處是非極化的。 DALI通常與微控制器光學隔離,數據傳輸速率為1200 bit/s。微控制器可以是8位單元,例如Microchip的PIC16F1947。沒有關于如何實現DALI電路設計的規范或建議,但圖2所示的光隔離電路將PIC16F1947與DALI總線連接。
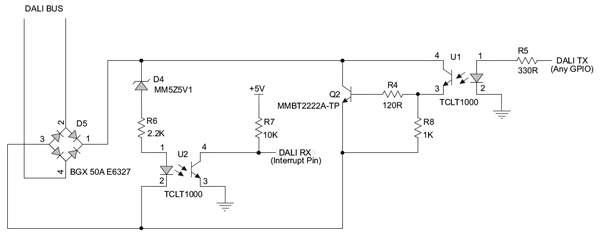
圖2:隔離通信電路圖。
PIC16F1947是一款基于64引腳閃存的8位CMOS微控制器。 RISC CPU只有49條指令需要學習。工作速度為DC至32 MHz,DC至125 ns指令周期。待機電流在1.8 V時通常為60 nA,工作電流在32 kHz,1.8 V時通常為7.0μA。
DALI使用曼徹斯特(雙相)編碼發送起始位和信息位。信息速率為1200 bit/s,可接受的范圍為±10%。一位時間是833.33μs。最高位(MSB)首先發送出去。在控制設備和控制設備之間發送的任何分組都是雙相編碼分組。然后對分組進行解碼,并相應地處理地址和消息。這里討論的照明通信板有一個PIC16F1947微控制器單元以及一個隔離的DALI通信電路接口和一個簡單的電源。由于來自DALI總線的信號被光耦合器反相,PIC單片機會查看曼徹斯特編碼和解碼以下列方式:曼徹斯特碼是一種數字編碼格式,其中符號‘1’由下降沿(高后跟低)表示,符號‘0’由上升沿(低后跟高)表示)。高脈沖和低脈沖都具有相等的寬度,等于位周期的一半。使用定時器對傳出消息進行編碼,并使用其中一個引腳發送數據包。每隔416.67μs或半位時間使用定時器產生中斷,這是信號相位需要改變的地方。如果它發送一個‘1’作為該位,則前半部分為‘1’,并且在中斷時信號反轉,反之亦然。結果,輸出是曼徹斯特編碼的分組,如果由控制設備發送則準備由控制裝置解碼,或者如果作為控制裝置的響應發送回控制裝置則由控制裝置解碼。 br》解碼更復雜。當接收開始時,接收器,無論是控制設備還是控制設備,確保從開始位開始接收整個數據包,然后是8位或16位消息,最后至少兩個空閑表示停止位。使用PIC16F1947上的外部中斷引腳完成解碼。該引腳專門用于在每次輸入信號的相位發生變化時產生中斷。定時器用于每3/4位產生一次中斷,因此在該點測量該值,并確定該位是“0”還是“1”。當外部中斷發生時,定時器復位并在該位的中間重新加載,并且由于漂移檢查而保持錯誤。
這個DALI電路具有簡化的電源和通過PIC16F1947實現的曼徹斯特編碼通信為控制裝置和控制裝置實施DALI調試和指令的基礎。
射頻能量的接近感應
智能手機和其他無線設備使用增加的持續影響之一是擔心人體對射頻(RF)能量增加的健康損害。隨著基于無線的M2M設備數量的增長,這些擔憂可能會增加。因此,各種電信機構對他們認為安全暴露于射頻能量的東西設定了限制。這些限制被稱為比吸收率(SAR),其是使用RF裝置時身體吸收的RF能量的量。制造商必須遵守這些限制。設備必須在接近或接觸人體時降低設備的RF輸出。該應用在電路中使用Atmel TinyAVR器件來檢測器件是否靠近用戶。
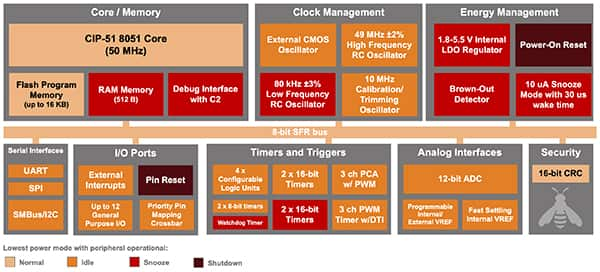
Atmel ATTiny20是一個基于8位AVR RISC的微控制器,它結合了2 KB的ISP閃存,128字節的SRAM,12通用I/O線,16個通用工作寄存器,帶2個PWM通道的8位定時器計數器,帶2個PWM通道的16位定時器計數器,內部和外部中斷,以及8通道10位數模數轉換器。此外,該器件還包括一個帶內部振蕩器的可編程看門狗定時器,一個從屬雙線接口,一個主從串行外設接口,一個內部校準振蕩器和四個軟件可選擇的省電模式。該器件工作在1.8和5.5 V之間。通過在單個時鐘周期內執行指令,器件實現了接近1 MIPS/MHz的吞吐量,平衡功耗和處理速度。
各種材料可用于形成接近傳感器,最簡單的是一塊銅帶或幾厘米的電線。傳感器需要盡可能靠近設備表面放置在與用戶接觸的位置。對于智能手機,這將是靠近耳機的屏幕側。它還需要遠離金屬結構部件和大面積的地面,因為這會降低靈敏度。來自平盤傳感器的電場以直角均勻地從傳感器的兩側投射。頂部和底部表面對進入場地的物體同樣敏感,但如果需要減小一個方向的靈敏度,則可以在該側使用網格填充的地平面。
傳感器的形狀不是重要。在該示例中,使用矩形銅帶傳感器。它高約8毫米,長25毫米,安裝在1毫米厚的聚碳酸酯底部,然后安裝在支座上,以便與桌面隔離。電場的大小和靈敏度受傳感器尺寸的影響;傳感器越大,磁場越大,靈敏度越高。較大的傳感器雖然需要更長的時間來充電,但卻增加了功耗和響應時間。但是,在智能手機和其他無線設備的情況下,設備的大小將受可用空間的限制。用于開發和調諧電容式接近感應系統的單通道接近傳感器設計如圖3所示。
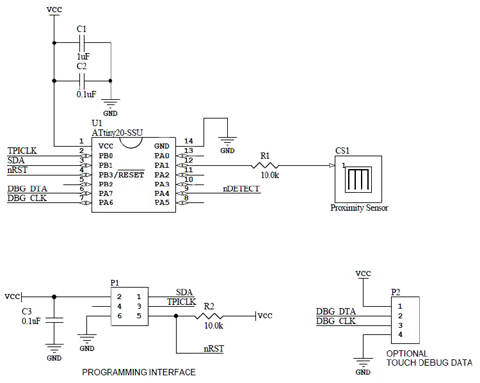
圖3:電容式接近感應系統。
此設計基于Atmel ATTiny20 MCU,提供器件編程和觸摸系統調試數據的標題,以簡化接近傳感器調整。接近傳感器通過10kΩ串聯電阻連接到端口引腳。固件來自Atmel的免費QTouch庫,該庫為公司的大多數MCU提供傳感器支持。
結論
越來越多連接設備的普及已經并且仍在為使用8位微控制器提供機會。隨著物聯網革命的繼續,小型設備的邊緣將需要處理能力。通常所需的處理遠低于16位和32位器件的能力,并且預計會出現使用8位微控制器的復興。本文給出了這些單元部署方式的三個截然不同的例子,顯示了在未來幾年內可以證明非常寶貴的多功能性。
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753083 -
智能手機
+關注
關注
66文章
18477瀏覽量
180111 -
控制器
+關注
關注
112文章
16332瀏覽量
177812
發布評論請先 登錄
相關推薦
探索ACPL-302J光耦合器的多功能性

CMOS通用時基定時器應用案例:多功能性與實用性的成功結合
NMEA接口的多功能性

12芯M16插頭連接器的多功能性

12針M16接頭的多功能性

7針M16接頭的多功能性
論RISC-V的MCU中UART接口的重要性
8位Atmel 微控制器ATMEGA325V-8AU技術手冊
使用優化型 8 位微控制器簡化資源受限型器件的設計
手持三防平板丨工業平板電腦丨加固平板電腦丨移動辦公的多功能性
無風扇工控機的多功能性和空間效率

繼電器光耦在微控制器中的應用





 工商網監
工商網監
評論