 利用無線接口實現互連玩具的基本架構
利用無線接口實現互連玩具的基本架構
今天,用 Android 或者 iOS 手機或平板電腦連接、控制的玩具已很常見,而集成了采用藍牙和 Wi-Fi 無線連接功能各種玩具則出現了爆炸式增長。 在商場貨架上,可以看到各種各樣的機器人、無人飛機和許多游戲機都集成了無線接口。 現在,這些玩具能以高性價比方式集成無線接口、多軸傳感器、小尺寸顯示屏、觸控以及其它功能,而這一切要歸功于這些元件的實現成本已大幅降低。
在手機、平板電腦中使用的此類器件已大批量生產,導致了元件成本急劇下跌。這兩種設備都集成了 Wi-Fi 和藍牙收發器,以及作為基本規范一部分的運動傳感器、陀螺儀、GPS 接收器、觸控屏。 不僅無線連接的成本在下滑,而且在最新一代互連玩具中也能找到身影的多軸傳感器、微控制器以及其它元件的成本也在下滑。 此外,由于大多數玩具傾向于由電池驅動,因此功耗也是所有這些元件的一個關鍵要求,從而促進了低功耗藍牙標準 (BLE) 及其最新姊妹標準——智能藍牙的采納。
那么,什么是智能藍牙呢? 從本質上講,智能藍牙和低功耗藍牙相同,但后者采用通用屬性規范 (GATT),在屬性協議 (ATT) 頂層構建。 GATT 規范為按照 ATT 傳輸和存儲的數據確定了通用工作模式和一個構架。 GATT 為低功耗藍牙硬件定義了服務器和客戶端角色。 由于 GATT 用于發現服務,因此 GATT 和 ATT 規范在低功耗情況下屬于強制執行的規范。 軟件開發人員使用 GATT 能夠很容易地簡化手機或平板電腦與玩具之間的發現和鏈接過程。
在藍牙開發者文檔的術語中,GATT 規范規定了規范數據交換的結構。 這種結構定義了規范中使用的服務和特征等基本要素。 這個層級結構的頂層就是規范。 一個規范包括完成使用實例所必需的一個或多個服務。 服務則由特征或對其它服務的引用組成。 每個特征包括一個值并可能包含有關該值的可選信息。 服務、特征和特征的組成(即值和描述符)包含規范數據,且均保存在服務器上的屬性中。1
低功耗藍牙標準旨在通過建立非常快的連接(若干毫秒)并傳輸極少量數據來降低功耗。 這些技術可以將功耗降至傳統藍牙的十分之一。 BLE 設備可以進入休眠模式,并在發生事件活動時喚醒。 而且,其最大功耗小于 15 mA,平均功耗約 1 μA。 因此,一顆小型紐扣電池(例如 CR2032)便可為設備供電長達 10 年之久。
對于尋求在功耗敏感的小型便攜設備中添加 BLE 或者智能藍牙的設計人員,可以考慮 BL600 系列模塊(Laird Technologies 提供)。 BL600 模塊基于 Nordic Semiconductor 的 nRF51822 芯片組,在緊湊的 19 x 12.5 mm 基底面內實現了低功耗和很好的覆蓋范圍。 該模塊包含支持 BLE 應用開發所需的全部硬件和固件。 BL600 模塊也完全通過了藍牙終端產品鑒定,設計人員可直接將其集成到設備中,無需再進行藍牙鑒定。
同樣,Panasonic 的 PAN1326/1316 系列 RF 模塊也同時具備了低功耗藍牙和智能藍牙連接功能。 這種技術融合為短距離應用創造了一種低成本、超低功耗無線網絡解決方案。 PAN1326/1316 主機控制接口 (HCI) 系列還為 Texas Instruments 的 CC2564 器件提供了模塊格式,使其方便使用。 Panasonic 的小型基底面技術能讓模塊基底面(含天線)縮小至僅 85.5 mm2。 這些模塊可以容納 1.3mm 焊線間距、至少為兩層結構的 PCB,從而簡化了制造、實施過程。
Panasonic 還針對三種藍牙標準提供三模開發模塊。 這種模塊可直接插入 Panasonic 開發套件以及 Texas Instruments 的 MSP430 和 Stellaris 實驗板中,并帶來了針座連接器優勢,以簡化原型的布線和現場試驗。
互連玩具的基本架構非常類似于嵌入式控制系統——通常包括一個中央控制處理器,帶有本地存儲器、電源管理功能、用于連接多軸傳感器或開關的各種信號輸入、控制一個或多個電機的附加輸出信號、一個顯示屏或指示燈,或一些其它功能,此外,還配備用于連接 Wi-Fi 和/或藍牙無線電的無線接口(圖 1)。 今天的控制器通常是一款基于 ARM? Cortex?-M0 或 M3/M4 處理器內核的高集成度微控制器,無線電功能則通常依賴一個包含發射/接收電路和功率放大器的獨立芯片或模塊。
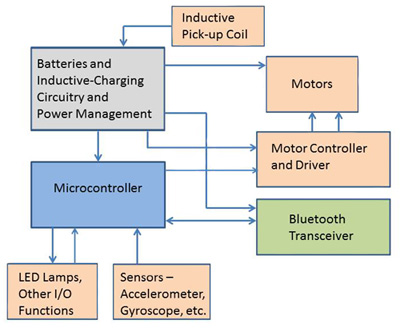
圖 1:互連玩具的內部電子子系統簡圖,如 Orbotix 的 Sphero。該簡圖反映了一個典型的嵌入式控制系統。 微控制器執行程序,而其 I/O 引腳則用于連接并控制不同的傳感器、電機、開關、顯示屏和無線電。
由 Orbotix 開發的 Sphero 球形機器人是市面上較吸引人的互連玩具之一(圖 2)。 該公司在一個接近高爾夫球大小的透明塑料球內置入了一個完整的系統,該系統包括一個內部電池無線充電系統、一個基于 Cortex-M4 的微控制器(STMicroelectronics 提供)、一個 ARM 處理器(運行藍牙堆棧協議)、一個 Texas Instruments 電機驅動器(控制電機)、一個 Bosch 陀螺儀傳感器、多個彩色 LED 燈(允許用戶改變 Sphero 球形機器人的顏色)以及一個 Amp’edRFd 提供的傳統藍牙無線接口。 第二代 Sphero 產品用智能藍牙解決方案取代了傳統藍牙,將會降低功耗。 在充滿電的狀態下,Sphero 球在全加力游戲規則下可以玩一個小時,且其控制距離可達 100 英尺。
圖 2:Sphero2 是 Orbotix 公司開發的最新一代球形機器人,這款產品由通過低功耗藍牙無線鏈路連接的 iOS 或 Android 智能手機或平板電腦控制(上圖)。 用戶界面簡單,可下載到 Apple iOS 或 Android 智能手機,或平板電腦上(下圖)。
在如何運用智能手機或平板電腦實現新功能方面,由 Wowwee 和 Parrot 等公司推出的玩具機器人和無人飛機便是很好的實例。 例如,Parrot 的“Jumping Sumo”兩輪玩具機器人配備嵌入式攝像頭,能夠通過 Wi-Fi 連接將視頻內容傳回智能手機或平板電腦(圖 3 左)。 其中,Wi-Fi 連接也用于控制,用戶可使機器人沿圓周滾動或跳躍,其跳躍高度超過 2.5 英尺并且在下落時能保持滾輪先接觸地面。
Parrot 的 AR 無人機 Drone2.0 是一款配備高清攝像頭的四螺旋槳設備,其攝像頭能以 30 幀每秒的速度捕獲 720p 視頻內容,并利用 H.264 編碼器進行視頻編碼(圖 3 右)。 盡管可利用集成 WI-Fi 接口將視頻內容發送回智能手機或平板電腦,但該系統還配備了 USB 插槽,方便用 U 盤在本地保存視頻內容。 板載計算機/控制系統采用一個基于 1 GHz 32 位 ARM 的微控制器和一個 Texas Instruments TMS320DM64x 視頻 DSP 芯片。
圖 3:Parrot 的跳躍機器人玩具 Jumping Sumo 可在空中的跳躍高度為 2.5 英尺,配備一個嵌入式攝像頭,能通過 Wi-Fi 接口將視頻內容傳回智能手機或平板電腦(左圖)。 AR 無人機 Drone2.0 Quadricopter 也是 Parrot 產品,具有精度極高的控制和自動穩定功能,能在飛行中捕獲高清視頻內容。 采用多個傳感器提供穩定、定位、定向和地面速度數據。
Wi-Fi 接口提供 802.11b/g/n 和多傳感器連接,具體包括三軸陀螺儀、加速計和磁力計(用于 GPS 定位)、壓力傳感器和超聲波傳感器(用于海拔高度測量)。 另一個低分辨率攝像機 (QVGA) 以 60 幀每秒的速度捕獲圖像,以協助測量地面速度。 這款無人機由四個轉速達 28,500 RPM 的無刷電機提供升力,每個電機由 Atmel 8- MIPS AVR 系列 CPU 控制。 采用一個 1000 mAH 可充電鋰聚合物電池提供電源。 Apple 應用商店提供一款名為 AR.Free Flight 免費軟件應用,能夠讓 iPhone、iPod Touch 或 iPad 控制這款無人機。
如果工程師正在為一個設計項目部署 Wi-Fi 連接,則應關注一下 Skyworks 的 SE2594L,這是一款完整的 802.11a/b/g/n WLAN RF 前端模塊,具備功率放大器、濾波、功率檢測器、T/R 開關、多路復用器和相關匹配功能等全部功能。 所有 RF 端口均針對易用性而設計,可匹配 50 Ω 電阻,從而能簡化 PCB 布局和收發器的 RFIC 接口。 SE2594L 還包括一個用于每個頻段、發射鏈的發射器電源檢測器,且每個發射鏈的動態范圍均為 20 dB。 SE2594L 外形小巧,是一個完整的、能涵蓋從收發器輸出到天線的 2.4GHz 和 5GHz WLAN RF 解決方案。
總之,市場上各種各樣的無線玩具如雨后春筍般涌現,從小型直升飛機、多螺旋槳無人機,到在辦公室地面上游走的機器人阿凡達,應有盡有。 許多設備都充分利用了無線技術控制運動,有時還用于收發視頻內容。 本文介紹了不同玩具供應商用來實現連接和控制的藍牙、Wi-Fi 等一些技術,甚至還涉及到窩蜂子系統。 正如本文中所有實例展示的那樣,互連玩具概念可以千變萬化,受限的只是設計人員有限的創造力。
-
嵌入式
+關注
關注
5083文章
19133瀏覽量
305657 -
無線
+關注
關注
31文章
5455瀏覽量
173384 -
攝像頭
+關注
關注
60文章
4845瀏覽量
95792
發布評論請先 登錄
相關推薦
想使用typec接口實現數據與音頻一體的功能,有推薦的芯片嗎?
任意波形發生器的基本架構
如何利用無線MODBUS通訊模塊實現無線485通信?







 工商網監
工商網監
評論