") ToF傳感器測(cè)量技術(shù)在距離感測(cè)和手勢(shì)識(shí)別中的應(yīng)用
ToF傳感器測(cè)量技術(shù)在距離感測(cè)和手勢(shì)識(shí)別中的應(yīng)用
很多應(yīng)用需要在不接觸實(shí)際物體的情況下,感測(cè)物體的存在或距離。這種接近感應(yīng)需求催生了眾多競(jìng)爭性解決方案,包括光學(xué)飛行時(shí)間 (ToF) 傳感器。雖然這些傳感器非常精確,但其成本一直非常昂貴,并且實(shí)施復(fù)雜;不過最近的解決方案已經(jīng)顯著簡化了此類技術(shù)的使用。
使用接近感應(yīng)的產(chǎn)品列表包括相機(jī)自動(dòng)對(duì)焦系統(tǒng)、機(jī)器人和無人機(jī)、各種浴室裝置,以及自動(dòng)門的門禁傳感器。這里只是舉了幾個(gè)例子,此類產(chǎn)品列表還在不斷擴(kuò)大。競(jìng)爭性的接近感應(yīng)技術(shù)首先是簡單的紅外線和超聲波傳感器,再逐漸發(fā)展到更復(fù)雜的傳感器系統(tǒng),例如使用神經(jīng)網(wǎng)絡(luò)的立體視頻攝像機(jī)。
所有這些技術(shù)都存在局限性,并且可能需要人工智能來實(shí)施復(fù)雜任務(wù),例如自主駕駛車輛的對(duì)象識(shí)別和跟蹤,但對(duì)于分配紙巾和肥皂這樣的任務(wù),這些技術(shù)又顯得大材小用了。設(shè)計(jì)人員面臨著不斷縮緊的預(yù)算和日益緊迫的設(shè)計(jì)時(shí)間窗口,他們需要最大程度地減少成本、空間和設(shè)計(jì)時(shí)間。
一種替代型接近感應(yīng)解決方案是 ToF 傳感器。它們通過測(cè)量光子從傳感器發(fā)射到物體并反射回來的往返時(shí)間,測(cè)量與目標(biāo)物體之間的距離。截止目前,一直是很難以低成本快速地實(shí)施 ToF 設(shè)計(jì),但新一代高度集成的低成本 ToF 傳感器讓我們能夠?qū)⒏叨染_的非接觸式感應(yīng)技術(shù)帶入低成本設(shè)計(jì)中。
本文將討論包括 ToF 傳感器在內(nèi)的距離測(cè)量技術(shù)在各種距離感測(cè)和手勢(shì)識(shí)別應(yīng)用中的演進(jìn)和使用情況。接著,本文將描述 ToF 傳感器技術(shù)的工作原理,最后還將介紹一些最新的解決方案及其入門使用方法。
早期的接近傳感器
1972 年推出的寶麗來 SX-70 即拍即得相機(jī)采用了眾多創(chuàng)新技術(shù),其中包括一種三反光學(xué)設(shè)計(jì)折疊了扁平的 Fresnel 鏡頭、一個(gè)扁平 6 伏電池內(nèi)置在即時(shí)膠片封裝中,以及一個(gè)十次使用的 Flash Bar 閃光燈。但是,寶麗來在 SX-70 中引入的一種影響最大的技術(shù)莫過于 Sonar 自動(dòng)對(duì)焦系統(tǒng)。這種系統(tǒng)最初出現(xiàn)在 1978 年推出的寶麗來 SONAR OneStep 相機(jī)中(圖 1)。SONAR 自動(dòng)對(duì)焦系統(tǒng)采用了創(chuàng)新的超聲波傳感器,既可用于發(fā)射超聲波測(cè)距脈沖,又可用于接收反射的超聲波能量。
圖 1:寶麗來 SONAR OneStep SX-70 相機(jī)采用了超聲波傳感器(相機(jī)頂部的大金色圓圈)來實(shí)現(xiàn)自動(dòng)對(duì)焦測(cè)距。(圖片來源:維基百科)
SONAR 的超聲波傳感器取得了極大成功,寶麗來為該傳感器設(shè)立了專門業(yè)務(wù),直至今日,寶麗來超聲波自動(dòng)對(duì)焦傳感器仍然有著巨大影響。例如,價(jià)格低廉的 SparkFun SEN-13959 HRC-SR04 超聲波測(cè)距模塊是一款距離傳感器,采用單獨(dú)的傳輸和接收傳感器(圖 2)。該傳感器可由 Arduino 開發(fā)板直接驅(qū)動(dòng)。其測(cè)距范圍在 2 至 400 厘米 (cm) 之間,能夠進(jìn)行無接觸的近距離測(cè)量,最小分辨率為 3 毫米 (mm)。
圖 2:SparkFun 的 SEN-13959 超聲波測(cè)距模塊使用反射的 40 kHz 脈沖來感測(cè)距離。(圖片來源:SparkFun)
為了使用此模塊來測(cè)量距離,Arduino 電路板(或其他控制器)發(fā)送 10 微秒 (μs) 脈沖到電路板的 Trig 引腳,該引腳觸發(fā)一系列由超聲波發(fā)射器發(fā)射的八個(gè)短超聲波脈沖。超聲波脈沖遇到目標(biāo)后反射回來,速度為每秒 343 米 (m)(在典型環(huán)境下,溫度為 20?C)。與目標(biāo)之間的距離計(jì)算方法是:超聲波脈沖發(fā)射和接收之間的時(shí)間長度乘以每秒 343 米,再除以 2(因?yàn)闀r(shí)間是往返時(shí)間)。
超聲波脈沖遇到硬表面時(shí),其反射效果好,但如果遇到簾子、地毯、衣服和聚酯塑料等軟表面,反射效果就不太理想。測(cè)量精確度將取決于所使用的脈沖計(jì)時(shí)方法。SparkFun SEN-13959 模塊沒有此類計(jì)時(shí)控制功能。該模塊依賴于主機(jī) CPU 進(jìn)行精確計(jì)時(shí)。此外,超聲波傳感器進(jìn)行距離測(cè)量的精確度和穩(wěn)定性會(huì)隨著空氣溫度(溫度會(huì)改變聲波在空氣中傳輸?shù)乃俣龋┖涂諝饬鲃?dòng)(這會(huì)帶走很多反射的超聲波能量并衰減返回信號(hào))而發(fā)生變化。
紅外線 (IR) LED 也一直用于接近檢測(cè)和距離測(cè)量。例如,Sharp Microelectronics GP2Y0A41SK0F 距離測(cè)量傳感器裝置能夠根據(jù)從 IR LED 發(fā)出的反射紅外線光的強(qiáng)度,感應(yīng) 4 cm 至 30 cm 距離范圍內(nèi)的物體(圖 3)。該傳感器輸出模擬電壓,電壓范圍從 3 伏特以上(對(duì)應(yīng)于 3 cm 的距離)至大約 0.3 伏特(對(duì)應(yīng)于 40 cm 的距離),以指示物體距離。主機(jī)控制器負(fù)責(zé)將此模擬電壓轉(zhuǎn)換為數(shù)字表示。
圖 3:Sharp GP2Y0A41SK0F 紅外線距離測(cè)量傳感器裝置能夠檢測(cè) 3 cm 至 40 cm 范圍內(nèi)的物體。(圖片來源:Sharp Microelectronics)
然而,由于物體距離的計(jì)算依據(jù)是反射的紅外線能量多少,因此這種紅外線傳感器的精確度會(huì)受到多個(gè)可變因素的影響,例如物體反射率和環(huán)境光強(qiáng)度。
另一種使用紅外線光測(cè)量物體距離的方法是測(cè)量光子從傳感器的紅外發(fā)射器發(fā)射到物體,再反射回到傳感器的飛行時(shí)間。這種近距離測(cè)量傳感器將超聲波傳感器的 ToF 特征與光子速度的相對(duì)無干擾性(不受流動(dòng)空氣、環(huán)境光或反射率的影響)結(jié)合在一起。
一直到最近,我們都很難測(cè)量光子短距離發(fā)射的飛行時(shí)間,因?yàn)楣馑俑哌_(dá) 299,792,458 米/秒,根據(jù)經(jīng)驗(yàn),這相當(dāng)于大約每納秒一英尺。因此,ToF 傳感器需要非常精確的次納秒級(jí)計(jì)時(shí),這樣才能檢測(cè)幾微米、幾厘米甚至數(shù)英寸的距離。
不過,ToF 傳感器技術(shù)的成本已經(jīng)顯著降低,這要?dú)w功于視頻游戲產(chǎn)業(yè)。截止目前,也許 ToF 傳感器最廣為人知的應(yīng)用是 Microsoft? 的 Kinect 游戲控制器(圖 4)。第一代 Microsoft Kinect 在 2010 年底推出,作為該公司 Xbox 360 的外設(shè)。這個(gè)控制器在機(jī)器人制造公司中應(yīng)用非常廣泛,因?yàn)樗軌蚴褂?ToF 距離感測(cè),生成機(jī)器人即時(shí)環(huán)境的三維地圖。
圖 4:Microsoft Kinect 控制器適用于該公司的 Xbox 360 視頻游戲控制臺(tái),采用 ToF 感測(cè)技術(shù)來創(chuàng)建周邊環(huán)境的三維地圖。(圖片來源:維基百科)
Kinect 控制器的感應(yīng)技術(shù)經(jīng)過了微型化和簡化處理,以創(chuàng)建適合眾多嵌入式應(yīng)用的實(shí)用距離測(cè)量傳感器。
VCSEL 和 SPAD
例如,STMicroelectronics 現(xiàn)在擁有幾代微型 ToF 傳感器產(chǎn)品系列,可用于近距離測(cè)量。這些傳感器基于一些非常現(xiàn)代化的基礎(chǔ)技術(shù),包括紅外線垂直腔面發(fā)射激光器 (VCSEL) 和單光子雪崩光電二極管陣列 (SPAD)。
這個(gè) ToF 傳感器產(chǎn)品系列的三款傳感器是 VL53L0CX、VL53L1CX 和 VL6180X。雖然這三款產(chǎn)品都可用來測(cè)量距離,但它們具有不同的功能。
第一代 VL6180X ToF 傳感器具有一種距離模式,可測(cè)量從幾毫米到 100 mm 的距離(圖 5)。這款傳感器的尺寸為 4.8 x 2.8 x 1.0 mm,視場(chǎng)角為 42 度。它還帶有內(nèi)置的環(huán)境光傳感器,能夠補(bǔ)償環(huán)境光的變化。
圖 5:STMicroelectronics 的第一代 VL6180X 傳感器的最大測(cè)量距離為 100 mm。(圖片來源:STMicroelectronics)
第二代 VL53L0CX ToF 傳感器對(duì)白色目標(biāo)的室內(nèi)測(cè)量距離為 50 至 1200 mm(圖 6)。這款傳感器的尺寸為 4.4 x 2.4 x 1.0 mm,視場(chǎng)角為 25 度。當(dāng)傳感器在室外使用時(shí),由于環(huán)境光的作用,最大測(cè)量距離縮小為 600 至 800 mm。
圖 6:STMicroelectronics 的第二代 VL53L0CX 傳感器的最大測(cè)量距離為 1200 mm。(圖片來源:STMicroelectronics)
第三代 VL53L1CX ToF 傳感器具有三種距離模式(圖 7)。在短距離、中距離和長距離這三種模式下,當(dāng)沒有環(huán)境光時(shí),白色目標(biāo)的最大測(cè)量距離分別為 1360、2900 和 3600 mm。在環(huán)境光很強(qiáng)的情況下,短距離、中距離和長距離這三種模式下的最大測(cè)量距離分別為 1350、760 和 730 mm。這與我們的直覺相反,在環(huán)境光很強(qiáng)的情況下,短距離模式的測(cè)量距離最長。
VL53L1CX 的尺寸為 4.9 x 2.5 x 1.56 mm,最大視場(chǎng)角為 27 度。(這款傳感器的視場(chǎng)可以進(jìn)行編程并且可以縮小,如下所述。)
圖 7:STMicroelectronics 的第三代 VL53L1CX 傳感器的最大測(cè)量距離接近 4 m。(圖片來源:STMicroelectronics)
所有這三款 ToF 傳感器都支持近距離測(cè)量,分辨率為 1 mm,通過數(shù)字 I2C 接口報(bào)告到主機(jī)處理器,該接口也作為傳感器的控制端口。由于這些傳感器都使用 I2C 接口,因此連接到主機(jī)處理器極為簡單(圖 8)。
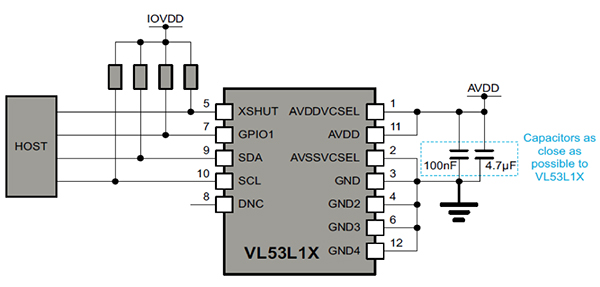
圖 8:與產(chǎn)品系列中的早期傳感器相同,STMicroelectronics 的第三代 VL53L1CX 傳感器使用簡單的 I2C 連接來連接到主機(jī)處理器。(圖片來源:STMicroelectronics)
請(qǐng)注意 AVDDVCSEL 和 AVDD 電源線非常特殊的旁路要求。100 納法和 4.7 微法的旁路電容器需要盡可能靠近傳感器,以防止電源噪聲進(jìn)入傳感器和降低精確度。
這些 ToF 傳感器實(shí)質(zhì)上全部都是一維的。它們報(bào)告視場(chǎng)范圍內(nèi)的物體接近度。如果視場(chǎng)范圍內(nèi)存在多個(gè)物體,這些傳感器將報(bào)告與最近物體的距離。單個(gè)傳感器無法檢測(cè)單手手勢(shì)的方向,但可用于檢測(cè)四個(gè)簡單手勢(shì),包括:
單擊(手向下移動(dòng)“輕擊”傳感器)
雙擊
單次輕掃(手移動(dòng)滑過傳感器的視場(chǎng))
雙次輕掃
通過使用一個(gè)、兩個(gè)或更多傳感器,在多個(gè)維度上檢測(cè)手勢(shì)和運(yùn)動(dòng),可以從其中一個(gè) ToF 傳感器獲取手勢(shì)和運(yùn)動(dòng)信息。通過使用成對(duì)的 ToF 傳感器,也可以探測(cè)從左至右和從右至左的手部移動(dòng)。
此外,還可以通過有選擇地縮小視場(chǎng)范圍,從第三代 VL53L1CX 接近傳感器獲取更多信息。這要使用通過 I2C 接口發(fā)送到傳感器的命令,關(guān)閉傳感器陣列中的各個(gè) SPAD 來實(shí)現(xiàn)。VL53L1CX 接近傳感器的 SPAD 陣列為 16 x 16 陣列,包括 256 個(gè)光電二極管。該陣列的任何方形或矩形部分可以通過軟件命令來激活,這些命令可指定陣列中應(yīng)激活的 SPAD 周圍方框的兩個(gè)角。通過減少激活元件的數(shù)量,可減小傳感器的視場(chǎng)并縮小傳感器的感應(yīng)區(qū)域。唯一要求是必須至少激活 16 個(gè) SPAD,形成一個(gè) 4 x 4 光電二極管陣列,但也允許更大的陣列。
在設(shè)計(jì)中使用 ToF 傳感器
為了快速啟動(dòng)設(shè)計(jì),VL53L1CX 接近傳感器隨附了評(píng)估套件 P-NUCLEO-53L1A1。該套件包括 STM32F401RE Nucleo 評(píng)估板,該板基于 STMicroelectronics STM32 微控制器;還包括 X-NUCLEO-53L1A1 擴(kuò)展板,該板安裝在微控制器板上并接受兩個(gè) VL53L1X 分線板(也包括在套件中)(圖 9)。
圖 9:STMicroelectronics P-NUCLEO-53L1A1 評(píng)估套件中的傳感器分線板包括一個(gè) V53L1X ToF 接近傳感器,它是直接安裝在板上。該板可在插接式分線板上接受另外兩個(gè) V53L1X 傳感器。(圖片來源:STMicroelectronics)
P-NUCLEO-53L1A1 評(píng)估套件還包括系統(tǒng)軟件和源代碼示例,以幫助快速啟動(dòng)開發(fā)工作。STMicroelectronics 還為 STM32Cube 軟件開發(fā)包提供了 TOF 距離測(cè)量和手勢(shì)檢測(cè)擴(kuò)展模塊。這些擴(kuò)展模塊專用于各個(gè)傳感器,并且可從 STMicroelectronics 直接免費(fèi)下載。
由于這些 STMicroelectronics ToF 傳感器非常小巧,它們可以用于設(shè)計(jì)人員可能想像得到的幾乎任何位置。以下幾個(gè)應(yīng)用示例可幫助發(fā)揮想像力:
機(jī)器人通用接近傳感器
自動(dòng)感應(yīng)紙巾和肥皂分配器
自動(dòng)感應(yīng)坐便器和小便斗沖洗器
自動(dòng)感應(yīng)水槽水龍頭
機(jī)器人真空吸塵器的墻壁邊清掃和避障傳感器
便攜式電腦和監(jiān)視器的低成本操作人員在場(chǎng)檢測(cè)器
零售自助服務(wù)終端的簡單在場(chǎng)和手勢(shì)檢測(cè)
自動(dòng)售貨機(jī)的物理庫存管理
自動(dòng)售貨機(jī)的硬幣計(jì)數(shù)
可自動(dòng)管理無人商店庫存的智能貨架
無人機(jī)的地面迫近檢測(cè)
室內(nèi)無人機(jī)的天花板接近檢測(cè)
與基于二維 ToF 傳感器或立體相機(jī)和神經(jīng)網(wǎng)絡(luò)的接近檢測(cè)器不同,這些集成式 STMicroelectronics ToF 接近傳感器的成本相對(duì)較低,因而能夠應(yīng)用于各種以不同價(jià)位售貨的終端產(chǎn)品。
總結(jié)
包括光學(xué)和超聲波在內(nèi)的很多技術(shù)可用于接近感應(yīng),并且人們基于這些技術(shù)推出了很多優(yōu)秀的解決方案。然而,其中最新的一種接近感應(yīng)技術(shù)還是 ToF(飛行時(shí)間)。這種技術(shù)可計(jì)算光子離開傳感器發(fā)射到目標(biāo)并反射回到傳感器的往返時(shí)間,從而測(cè)量與目標(biāo)的距離。
隨著采用紅外線發(fā)射器和接收器的集成傳感器出現(xiàn),以及用于光子傳輸時(shí)間的次納秒級(jí)計(jì)時(shí)所必需的電路,使得這種技術(shù)得到了經(jīng)濟(jì)高效的使用。此外,相關(guān)的開發(fā)套件也有助于進(jìn)行實(shí)驗(yàn)和加快原型開發(fā)。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51194瀏覽量
754412 -
超聲波
+關(guān)注
關(guān)注
63文章
3023瀏覽量
138452 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1606瀏覽量
60123
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
手勢(shì)識(shí)別傳感器是如何工作的?
智能馬桶腳感方案 TOF傳感器選型推薦
【VEML4020近距離感應(yīng)申請(qǐng)】基于手勢(shì)識(shí)別的可交互式智能家居機(jī)器人
【VEML4020近距離感應(yīng)試用體驗(yàn)】手勢(shì)識(shí)別原理窺探+VEML4020驅(qū)動(dòng)程序解析
TI的CapTIvate? 技術(shù)實(shí)現(xiàn)鄰近度和手勢(shì)感測(cè)
觸摸/距離傳感器能用于檢測(cè)手勢(shì)嗎?
走進(jìn)飛行時(shí)間傳感技術(shù)揭秘TOF傳感器工作原理及應(yīng)用領(lǐng)域
氮化鋁(AlN)陶瓷電路板技術(shù)應(yīng)用——ToF傳感器
RT-Thread VL53L0X TOF傳感器驅(qū)動(dòng)設(shè)計(jì)資料實(shí)現(xiàn)
哪個(gè)模塊最適合從距離傳感器模塊飛行時(shí)間 (ToF) 測(cè)距傳感器測(cè)量準(zhǔn)確距離?
ADI光學(xué)傳感器改善手勢(shì)識(shí)別應(yīng)用的可靠性
基于ToF傳感器的3D手勢(shì)識(shí)別解決方案
手勢(shì)識(shí)別技術(shù)及其應(yīng)用
產(chǎn)品|TOF技術(shù)在傳感器中的應(yīng)用

ToF4M Unit高精度距離傳感器單元






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論