

使用全球導航衛星系統(GNSS)進行跟蹤的應用現在能夠使用多個全球定位衛星星座,如美國的GPS,俄羅斯的GLONASS,歐洲的伽利略或中國的北斗。多個系統的使用確保了更好的覆蓋范圍,更快的采集速度和更高的定位精度,但它增加了設備成本并增加了開發時間。
隨著資產跟蹤等GPS應用的增長,芯片供應商努力解決這些成本和開發時間問題,導致低成本模塊化GNSS解決方案的發展。這些第一代模塊為具有有限經驗的設計人員提供了更具成本效益和更直接的GPS。但是,功能上的一些妥協是不可避免的。它們實施起來過于復雜,評估工具很少見。
現在出現了新一代GNSS模塊,它解決了早期模塊的缺點,并且成本最低。這些器件具有更高的采集速度和精度,并具有更高的集成度,可降低設計復雜性并減小解決方案尺寸。它們還帶有評估平臺,使開發人員可以更輕松地構建,測試和配置原型。
本文介紹了第二代設備的主要增強功能,并展示了如何使用現代設備GNSS模塊評估板為設計原型。
GNSS模塊的演變
從頭開始設計GNSS系統是一項復雜的業務。這些困難促使廉價模塊化解決方案的出現成本低于每單位50美元,具有合理的性能,緊湊的尺寸和低功耗。
然而,為了保持低價并加速商業化,存在一些缺點第一代模塊化GNSS解決方案,包括:
低無線電靈敏度:靈敏度差,延長了接收機拾取固定其位置所需的三顆(至少)三顆衛星所需的時間。早期模塊的低無線電靈敏度導致首次定位時間(TTFF)至少一分鐘且通常更長。即使熱啟動,接收器自上次使用后仍未移動,并且仍然在板載內存中有先前的位置信息,可能需要30秒以上。
受限制的內存分配:低內存容量限制了星歷數據的存儲(有關衛星星座當前和未來軌道位置的信息)。如果GNSS模塊長時間丟失衛星信號,則存儲的星歷信息會過時,重新采集可能需要幾分鐘。
缺乏定位精度:位置精度主要由時間同步決定與衛星時鐘。 1納秒的同步誤差導致30厘米的位置誤差。早期模塊中的定時誤差精度限制在±15米之內。
缺乏輔助和增強的GNSS:早期GNSS模塊無法利用通過將GNSS信號參考基站信號來幫助定位精度的系統已知位置。
最小集成:第一代模塊中不包括閃存,晶體和電源管理等關鍵組件,這使設計復雜化并增加了解決方案的尺寸。
缺乏評估工具包:在能夠測試提議的設計之前,工程師被迫構建自己的硬件原型。
固件:早期模塊提供的固件很少或沒有提供重新配置或升級導致現場設備快速軟件過時。
解決這些缺點的新一代GNSS模塊現已進入市場。在提交到特定組件之前,工程師可以從幾個高性能集成模塊中進行選擇并使用制造商的相關評估套件來嘗試概念。
例如,Maxim Integrated的MAX2771ETI + GNSS接收器提供高度集成在一個5 x 5毫米(mm)的包裝中。具體來說,該器件集成了完整的接收器鏈,包括雙輸入,低噪聲放大器(LNA),混頻器,濾波器,可編程增益放大器(PGA),多位模數轉換器(ADC),分數N頻率合成器和晶體振蕩器。
值得注意的是,該器件通過實現片上單片器件來消除外部中頻(IF)濾波器。結果是一個模塊只需要幾個外部元件就可以形成一個完整的,低成本的GNSS RF接收器解決方案(圖1)。
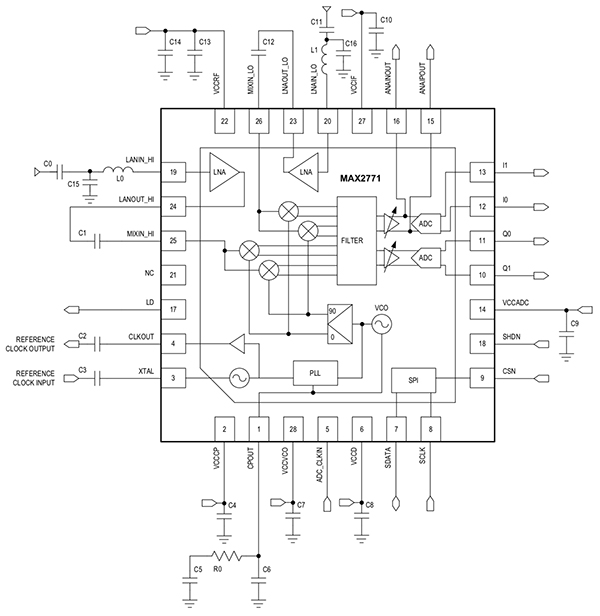
圖1:Maxim的MAX2771ETI +集成了完整,低成本GNSS RF接收器的關鍵元件,限制了所需的外部元件數量。 (圖像來源:Maxim Integrated)
輔助GNSS和增強的位置精度
第二代GNSS模塊還提供更快的衛星采集和更高的定位精度。獲取衛星位置的部分改進是由于增加的存儲器來存儲更多的星歷信息,以便在長時間的信號丟失期后更快地重新獲取衛星。然而,即使使用大閃存,準確的星歷數據對于GPS只有4小時有效,對于GLONASS則有效30分鐘。
使用“輔助GNSS”,這是一種技術,模塊通過另一個有線或無線連接從外部源獲取星歷信息,而不是直接從衛星獲得星歷信息。
例如,模塊供應商u-blox提供的服務可以通過互聯網連接的主機微處理器訪問星歷數據,并在啟動時將其輸入模塊。該服務的離線版本也是可用的,其中下載最多35天的軌道數據并存儲在主處理器和/或GNSS模塊閃存中。此外,u-blox提供其“AssistNow”技術,該技術使用歷史數據預測未來六天的衛星軌道位置。
輔助GNSS等技術可以從60秒左右開始改善冷啟動TTFF生成GNSS模塊到27秒(對于GPS和GLONASS星座),對于更新的模塊,例如u-blox的EVA-M8M-0 GNSS模塊。該解決方案提供-148 dBm的冷啟動靈敏度,有助于在沒有輔助GNSS的情況下加速TTFF。
基于衛星的增強系統(SBAS)也可用于顯著提高成本的定位精度 - 有效的GNSS模塊。這些系統利用來自廣域差分GPS(WADGPS)等技術的附加區域或廣域GNSS增強數據補充GNSS數據。 WADGPS使用來自已知位置的固定基站或地球靜止衛星的信息,這些信息保持在相對于地球表面的固定位置。這些信息允許GNSS模塊校正定時和位置誤差,以提高定位精度。例如,EVA-M8M-0 GNSS模塊可以使用SBAS提供±2.5 m的定位精度(圖2)。
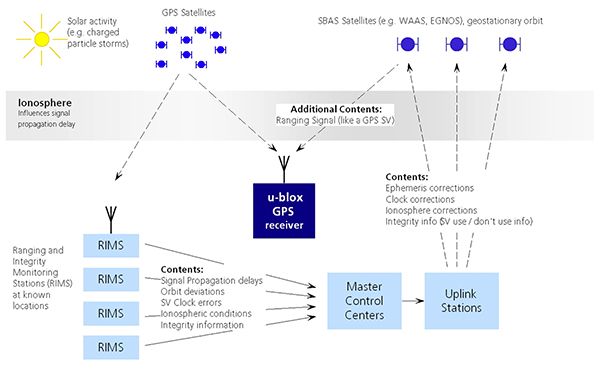
圖2:第二代GNSS模塊采用SBAS技術來提高定位精度。 SBAS使用地球靜止衛星和固定基站來補償由太陽活動和電離層影響引起的GNSS定時誤差。 (圖片來源:u-blox)
EVA-M8M-0是一種高度集成的設計,只需在大多數應用中添加外部GNSS天線。值得注意的是,該模塊包括一個內部微處理器該模塊還包括內部RAM和ROM,以及連接到外部閃存的串行四通道接口(SQI),以便在需要時進行額外的數據存儲。還提供連接外部晶體以進一步提高定時精度。
通過長期建立的國家海洋電子協會(NMEA)協議或u-blox專有的UBX協議,與GNSS模塊進行配置通信。通過I/O端口向接收器發送任何“UBX-CFG-XXX”消息,可以在正常操作期間更改配置。通過發送帶有適當“saveMask”(“UBX-CFG-CFG/save”)的“UBX-CFG-CFG”消息,可以永久配置。
使用第二代GNSS模塊進行設計
使用GNSS模塊進行設計需要遵守既定的RF設計指南。天線選擇,印刷電路板布局,晶體選擇和調諧電路設計將對無線電靈敏度和性能因素(如TTFF和位置精度)產生重大影響。
此外,雖然一些GNSS模塊具有嵌入式微處理器,但配置和應用控制通常需要單獨的外部控制器。大多數GNSS模塊通過串行GPIO,I 2 C端口或UART與外部微處理器通信。 (參見Digi-Key文章“快速使用GNSS模塊的設計位置跟蹤系統。”)
由于任何RF應用的硬件要求都很挑剔,因此測試一個入圍模塊的性能非常有用。構建硬件原型。第二代模塊現在配有評估套件,使設計人員能夠做到這一點。
例如,意法半導體提供其Teseo-LIV3F GNSS模塊評估板。該板是Teseo-LIV3F GNSS模塊的獨立評估平臺。該模塊是一個完全集成的器件,包括一個基于嵌入式ARM ?微處理器的GNSS內核,晶體和實時時鐘(RTC),電源管理,UART和I 2 C連接,以及16兆位(Mbits)的閃存。這些都集成在一個尺寸為9.7×10.1 mm的封裝中(圖3)。板載閃存允許長達7天的輔助GNSS,固件重新配置和固件升級。
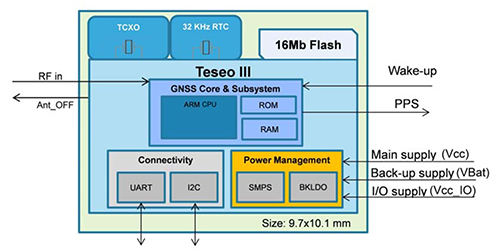
圖3:STMicroelectronics的Teseo-LIV3F GNSS模塊高度集成。值得注意的是,該模塊包含一個Arm微處理器和16 Mbits的閃存。 (圖片來源:STMicroelectronics)
Teseo-LIV3F GNSS模塊提供32秒冷啟動TTFN,-147 dBm冷啟動靈敏度和SBAS,可將定位精度提高到±1.5 m以內。
< p>配置Teseo-LIV3F GNSS模塊評估板是通過連接電路板的“UART”輸入來完成的。這實際上是USB型連接器,可以輕松連接到PC,但評估板包括FTDI的內部USB到UART橋,允許PC直接與模塊通信。然后,GNSS模塊的UART作為標準COM端口出現在PC的應用軟件上,盡管PC和GNSS模塊之間的實際數據傳輸是通過USB接口實現的(圖4)。
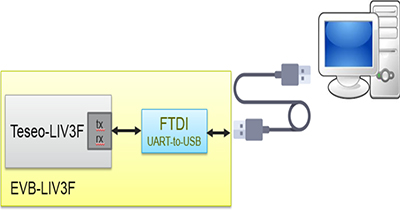
圖4:對于配置,STMicroelectronics評估板通過USB連接器連接到運行應用軟件的PC。 USB信號通過FTDI的橋接器轉換為GNSS模塊使用的UART信號。 (圖片來源:STMicroelectronics)
配置微處理器通常使用NMEA協議與GNSS模塊通信。該協議定義了三種類型的輸入/輸出:命令,寫消息和讀消息。模塊輸出每個輸入/輸出的響應。命令用于改變模塊的操作狀態,寫消息改變模塊的配置,讀消息提供當前配置。
輸入從主機微處理器發送到UART上的GNSS接收器或I 2 C RX線,輸出從TX線上的接收器發送。默認情況下,輸出消息以每秒一個的速率發送。該協議允許標準和專有輸入/輸出(圖5)。
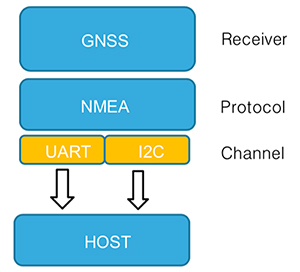
圖5:GNSS接收器和主機微處理器之間的通信是通過UART或I 2 C通道進行的,并使用NMEA協議。 (圖片來源:STMicroelectronics)
NEMA協議的消息結構很簡單,例如:
“command-ID,[parameter1,parameter2,...,parameterN] < cr> “for commands;
and
”message-ID, * “對于消息。
許多模塊制造商選擇專有的命令和消息方案。例如,意法半導體的NMEA命令采用“$ PSTM ...”的形式,表明指令采用公司專有(“P”)格式。
要配置Teseo-LIV3F GNSS模塊評估板,請安裝STMicroelectronics的Teseo Suite Light,這是一個基于PC的應用程序。按照程序的直觀界面,可以直接將設備添加到配置列表并激活端口連接。
例如,一旦UART端口處于活動狀態,設備就會開始運行,并且可以觀察NMEA視圖面板,檢查從GNSS模塊發送的消息和命令。
執行命令后,GNSS模塊將回復預定義的消息,并將命令作為最終執行確認發送回主機。例如,為了測試STMicroelectronics的ST-AGNSS技術的效果,使用表1中所示的NMEA命令控制接收器。
語法說明 $ PSTMSTAGPSONOFF 打開/關閉STAGPS?引擎 $ PSTMSTAGPSINVALIDATE 清除STAGPS內部數據庫中的數據 $ PSTMGETAGPSSTATUS 返回STAGPS內部處理的狀態 $ PSTMSTAGPSSETCONSTMASK 在ST-AGNSS星座之間切換
ST-AGNSS是一種輔助GNSS,它向GNSS接收機提供星歷數據的時間遠遠少于從TTFF衛星獲取實際數據所需的時間。
結論
模塊化GNSS技術將位置跟蹤技術擴展到更廣泛的應用。現在,集成,硬件,固件,輔助GNSS和增強定位方面的改進將第二代設備擴展到快速修復時間和增強位置精度至關重要的應用。新模塊繼承了其前代產品的尺寸,成本和功耗優勢,但得到了評估板和基于PC的應用軟件的支持,大大簡化了設計過程。
-
gps
+關注
關注
22文章
2960瀏覽量
168459 -
無線電
+關注
關注
60文章
2161瀏覽量
117602 -
GNSS
+關注
關注
9文章
839瀏覽量
49001
發布評論請先 登錄






 工商網監
工商網監

評論