

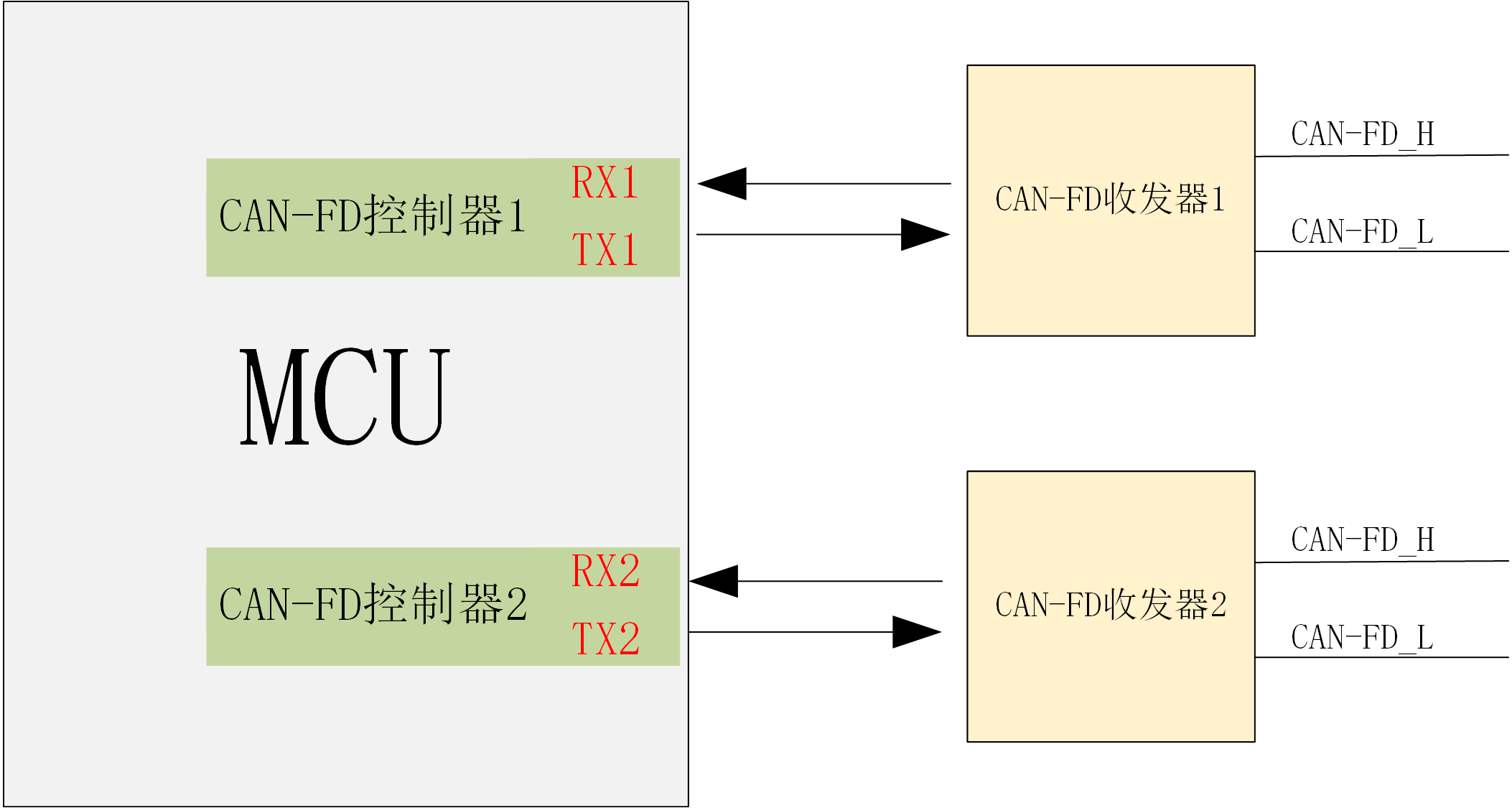
隨著工業2025的推進,現在自動化機械臂控制全面由傳統CAN 9600-115200波特率升級CAN2.0 1M乃至CAN-FD 4M高速協議,工業自動化機械臂多節點于工程布線時采用CAN2.0(或以上)總線通信,電腦控制端俗稱上位機與多個CAN收發節點實時雙工通信。 工業自動化工程現場高速CAN總線弱電通信信號及傳輸電纜需與220V/380VAC強電動力電、超大功率變頻、接觸器、電機等高電磁輻射源同處共舞,隔離與抑制總線上CE差模以及RE共模電磁干擾成為剛需,目前CAN2.0高波特率(大于1Mbps脈沖,傅立葉級數展開高頻諧波頻段高達到50M)要求系統報文延時小于2ms, 嚴格意義上從而對總線通信帶寬與共模抑制Trade off迎來嚴峻挑戰! 實測需要高CMRR共模抑制(雙線并進,零漏磁環牛,高耦合系數), 高-中-低頻(尤其是高積分高能量的接近于直流的50~100Hz超低頻輻射頻域段)廣譜頻域響應要求至少不小于1HX2感值@1M,CANH/L間寄生容值小于150pF,抗飽和度不小于10A電涌端口沖擊。
大印藍海工作室作品專注于工業自動化機械系統通信信號完整性解決方案, 成功應用于極速SMT貼片機,工業機器人,工業自動化控制、電機驅動,工業消防、新能源汽車,鋰電池管理BMS,充電樁,工業智能照明行業等應用。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
CAN
+關注
關注
57文章
2895瀏覽量
466892 -
信號完整性
+關注
關注
68文章
1437瀏覽量
96490
發布評論請先 登錄
相關推薦
熱點推薦
CAN FD協議及其與CAN2.0的異同
我們知道了, CAN2.0數據段只有8byte,最高速率為 1Mbit/s,通常使用的是 500k,隨著功能的逐漸增多,各 ECU 之間的信息交互也越多,導致總線負載持續走高;CAN 報文中只有
發表于 11-21 11:54
?5588次閱讀
如何從傳統的CAN用法中設置CAN-FD?
您好 NXP:
我們在 s32k312 平臺中使用了經典的 CAN 總線(2.0/固定 8 字節數據),現在我們想升級
CAN-FD 格式。我設置了 CAN-FD 參數(經典
發表于 04-14 11:32
多核異構-雙核高速率CAN-FD評測
產業的發展,各種傳感器和控制器數量的增多,總線上的數據量也激增,這使得CAN2.0總線在傳輸速率和帶寬方面的缺點暴露的更加明顯,于是就誕生了CAN-FD。
發表于 02-17 15:37
TDK CAN FD用共模濾波器ACT1210D系列的介紹
TDK CAN FD用共模濾波器中的ACT1210D型產品是一種通過包含繞組工藝的獨有結構設計,使泄漏電感、寄生電容、模式轉換特性最小化,針

TDK CAN FD用共模濾波器實現更大容量數據的高速通信
TDK CAN FD用共模濾波器中的ACT1210D型產品是一種通過包含繞組工藝的獨有結構設計,使泄漏電感、寄生電容、模式轉換特性最小化,針

STM32設備上的CAN FD
本文件的目的如下所述:
?概述具有靈活數據速率(CAN-FD)協議的控制器局域網(CAN)。
?描述CAN-FD相對于經典CAN
發表于 08-28 10:34
?9次下載
簡單介紹基于CAN-FD的診斷通信傳輸層
CAN-FD是CAN withFlexible Data-Rate的簡稱,從名稱可以看出,CAN-FD的數據速率是可變的。
發表于 11-10 17:46
?2677次閱讀
干貨分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南
簡介本文主要介紹了HPM6750的控制器局域網CAN(以下簡稱CAN控制器)的概述以及基于HPM-SDKCAN控制器的開發指導(包括實現

如何使用DSLogic分析CAN/CAN-FD 信號?
一文檔介紹本文將一步步介紹如何使用DSLogic邏輯分析儀采集并分析CAN/CAN-FD信號,因為CAN信號的測量和CAN-FD的大致一樣,所以下文以

什么是CAN2.0協議?
CAN2.0協議是控制器局域網絡(ControllerAreaNetwork,CAN)的一種版本,也被稱為傳統CAN協議,由德國博世BOSCH公司開發,并已成為國際上廣泛應用于汽車電子






 工商網監
工商網監

評論