


1月10日,在青島舉行的2019國(guó)家智能產(chǎn)業(yè)峰會(huì)智能駕駛平行論壇上,孫振平研究員結(jié)合國(guó)內(nèi)外機(jī)器學(xué)習(xí)相關(guān)技術(shù)在智能駕駛領(lǐng)域的研究現(xiàn)狀和課題組近年來的一些研究成果,向與會(huì)人員分享了題為《機(jī)器學(xué)習(xí)在無人駕駛中的應(yīng)用現(xiàn)狀及面臨挑戰(zhàn)》的精彩報(bào)告。
國(guó)防科技大學(xué)智能科學(xué)學(xué)院無人系統(tǒng)研究所副所長(zhǎng)孫振平
談到國(guó)內(nèi)自動(dòng)駕駛研究的起源,總繞不開一所有名的高校——國(guó)防科技大學(xué)。20世紀(jì)80年代末,國(guó)防科技大學(xué)先后研制出基于視覺的CITAVT系列智能車輛。1992年,國(guó)防科技大學(xué)成功研制出中國(guó)第一輛真正意義上的無人駕駛汽車。2011年7月,由一汽集團(tuán)與國(guó)防科技大學(xué)共同研制的紅旗HQ3無人駕駛汽車完成了286km的面向高速公路的全程無人駕駛試驗(yàn),而在背后主持研究紅旗無人駕駛汽車實(shí)現(xiàn)高速長(zhǎng)距離無人駕駛的,便是國(guó)防科技大學(xué)智能科學(xué)學(xué)院無人系統(tǒng)研究所副所長(zhǎng)孫振平研究員。2012年,孫振平研究員作為技術(shù)負(fù)責(zé)人,組織團(tuán)隊(duì)研制了我國(guó)第一臺(tái)邊防無人巡邏車。同時(shí),他作為主要技術(shù)骨干或負(fù)責(zé)人與團(tuán)隊(duì)一起參加了十余次國(guó)家自然科學(xué)基金委委主辦“中國(guó)智能車未來挑戰(zhàn)賽”和軍隊(duì)“跨越險(xiǎn)阻”無人系統(tǒng)挑戰(zhàn)賽,多次獲得冠軍。
1月10日在青島舉行的2019國(guó)家智能產(chǎn)業(yè)峰會(huì)智能駕駛平行論壇上,孫振平研究員結(jié)合國(guó)內(nèi)外機(jī)器學(xué)習(xí)相關(guān)技術(shù)在智能駕駛領(lǐng)域的研究現(xiàn)狀和課題組近年來的一些研究成果,向與會(huì)人員分享了題為《機(jī)器學(xué)習(xí)在無人駕駛中的應(yīng)用現(xiàn)狀及面臨挑戰(zhàn)》的精彩報(bào)告。
孫振平研究員在報(bào)告中表達(dá)了一下觀點(diǎn):
機(jī)器學(xué)習(xí)對(duì)解決無人駕駛問題很重要,但不是全部;
深度神經(jīng)網(wǎng)絡(luò)是場(chǎng)景建模與理解的有力工具;
統(tǒng)計(jì)學(xué)習(xí)、增強(qiáng)學(xué)習(xí)對(duì)于解決行為決策問題會(huì)有所幫助,前提是人工建立合適的決策模型;
用機(jī)器學(xué)習(xí)方法解決動(dòng)力學(xué)控制問題似乎并不簡(jiǎn)單;
能夠?qū)崿F(xiàn)任務(wù)、本體狀態(tài)、環(huán)境信息并行輸入的網(wǎng)絡(luò)結(jié)構(gòu)是研究的重點(diǎn);
現(xiàn)有計(jì)算能力仍不足以支持深度神經(jīng)網(wǎng)絡(luò)在無人車中的大規(guī)模應(yīng)用
以下是孫振平研究員在2019國(guó)家智能產(chǎn)業(yè)峰會(huì)的報(bào)告,智車科技在不改變?cè)獾幕A(chǔ)上進(jìn)行了修改:
大家好,非常榮幸能在這兒跟大家一塊聊無人駕駛,因?yàn)闄C(jī)器學(xué)習(xí)在無人駕駛應(yīng)用方面比較熱,針對(duì)這個(gè)事情跟大家分享一點(diǎn)思考。
大家可能不知道,國(guó)防科大在無人駕駛方面應(yīng)該說做的歷史也比較長(zhǎng)了,這些年有一些成績(jī)也有很多不足,特別是最近幾年我們看到整個(gè)社會(huì)對(duì)無人駕駛特別追捧,我們參與其中,肯定是非常非常的高興,但是在熱的過程中,我們也得認(rèn)真地去思考,是不是無人駕駛到現(xiàn)在已經(jīng)比較好的被解決了,這個(gè)我們還是要冷靜地去思考的。我個(gè)人就針對(duì)這方面的一些情況跟大家一塊兒分享一下。主要就是目前國(guó)內(nèi)外的發(fā)展情況,以及我們自己在這方面做的一些工作。
丨無人車的控制結(jié)構(gòu)
說到無人駕駛,從概念上來,大家對(duì)這個(gè)事情應(yīng)該都非常清楚了,無非就是給車裝上各種各樣的傳感器,讓它能夠自己理解周圍的環(huán)境,自己做規(guī)劃,自己選擇運(yùn)動(dòng)的路徑,直到控制自己的運(yùn)動(dòng)。在這個(gè)過程中,希望人不參與或者說盡可能少的參與,這么多的傳感器到底怎么組成無人駕駛的系統(tǒng)?這個(gè)事如果拿人來類比的話,比較容易理解。一個(gè)駕駛員開車感知周圍的環(huán)境,往往是通過我們的眼睛、耳朵等一些感覺器官。在感知的基礎(chǔ)上當(dāng)然要做決策規(guī)劃,主要是大腦來完成的,決策規(guī)劃的結(jié)果就是怎么樣控制車,操作機(jī)構(gòu)來實(shí)現(xiàn)對(duì)車輛的控制。
對(duì)于我們的無人駕駛系統(tǒng)來說,很顯然從原理上也是一樣的,我們必須去構(gòu)建它的眼睛。這個(gè)主要兩大類,一類是環(huán)境感知的傳感器,二是運(yùn)動(dòng)感知的傳感器。其中大腦是什么?對(duì)于無人駕駛來說,當(dāng)然就是運(yùn)行在計(jì)算機(jī)上人工智能的程序,這個(gè)程序它綜合了傳感器信息和用戶的任務(wù)輸入,最后產(chǎn)生控制命令,控制命令就控制相應(yīng)的一些執(zhí)行機(jī)構(gòu)來控制整個(gè)車的運(yùn)動(dòng),這個(gè)我想從原理上來說就是這樣的。
無人駕駛的技術(shù)真正困難就是人工智能的程序。我們?cè)趺慈ピO(shè)計(jì)它,說到設(shè)計(jì),實(shí)際上在人工智能應(yīng)用在移動(dòng)信息研究中,有一些基本的方案,大家不妨一起簡(jiǎn)單地回顧一下。
在人工智能研究中,有幾種基本的控制結(jié)構(gòu),一是慎思形式的,什么意思?我們要去顯示做決策規(guī)劃和執(zhí)行控制這樣的環(huán)節(jié),對(duì)應(yīng)的是一個(gè)一個(gè)程序模塊。當(dāng)然要設(shè)計(jì)一個(gè)這樣的結(jié)構(gòu),或者設(shè)計(jì)這樣的軟件系統(tǒng),需要很多人參與,需要人的智力的投入,這個(gè)很顯然我們覺得做起來非常麻煩。
另外一個(gè)比較直接的想法,當(dāng)然就是所謂的反應(yīng)式,我們最好能夠設(shè)計(jì)一個(gè)簡(jiǎn)單的程序,不需要知道它內(nèi)部是怎么工作的,能夠直接從傳感器到執(zhí)行器的映射,這就是所謂的反應(yīng)式。
當(dāng)然實(shí)際在研究過程中,最后大家都發(fā)現(xiàn)不管是慎思式還是反應(yīng)式做來做去都不能夠很好的解決問題,怎么辦?人類最大的本事就是把各式各樣的方法混在一起就是混合式,反應(yīng)式大家很容易理解,如果有一個(gè)控制方向我們用一個(gè)狀態(tài)方程組就能夠很好地描述它,當(dāng)我設(shè)計(jì)一個(gè)簡(jiǎn)單的控制器就能夠?qū)崿F(xiàn)對(duì)這樣對(duì)象的控制。對(duì)于我們說的機(jī)器人和無人車也不例外,我們能夠很好地描述清楚,就可以設(shè)計(jì)出一個(gè)簡(jiǎn)單的控制器出來。最早在1948年的時(shí)候,當(dāng)時(shí)控制論剛剛產(chǎn)生,就有人設(shè)計(jì)了一個(gè)移動(dòng)的機(jī)器人系統(tǒng)。這個(gè)慎思式,實(shí)際上大家關(guān)注的最典型的可能是世界上第一個(gè)自主的機(jī)器人,就采用這種慎思式的研究。SHakey研究了一個(gè)機(jī)器人只要能夠不碰撞運(yùn)動(dòng)就可以了,這是1968年做出來的,這個(gè)也是我們現(xiàn)在智能機(jī)器人(無人車)研究真正的現(xiàn)代意義上的開端。
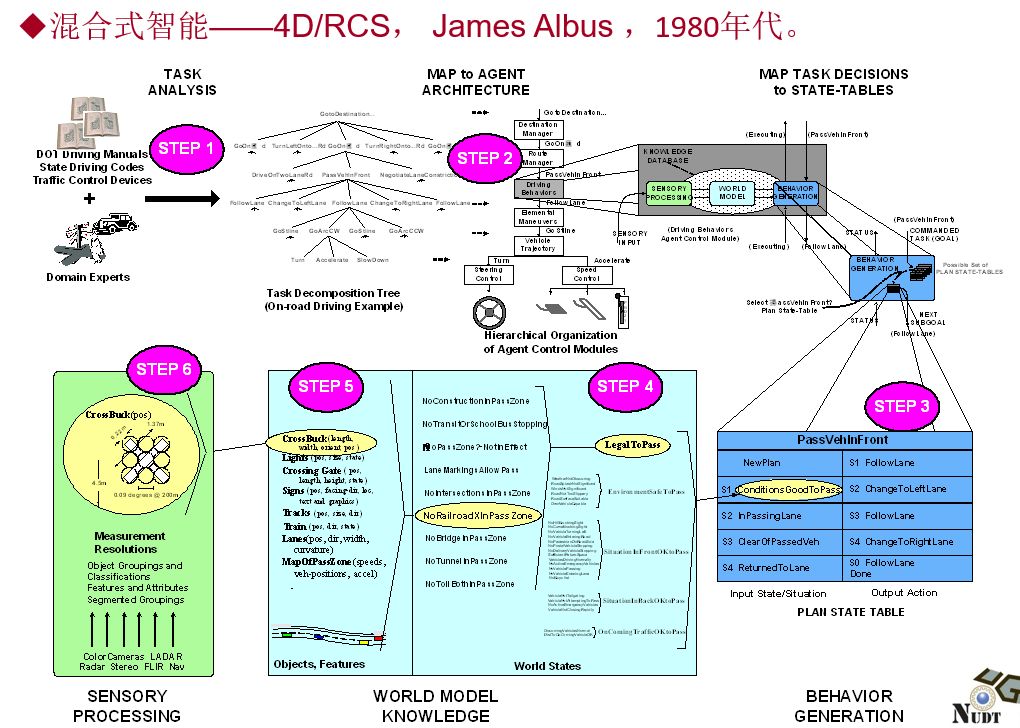
在這些研究基礎(chǔ)上,到了1986年的時(shí)候,MIT提出了一種所謂的包容式結(jié)構(gòu),這個(gè)包容式結(jié)構(gòu),大家仔細(xì)去分析一下就會(huì)發(fā)現(xiàn),它實(shí)際上是一種混合式的結(jié)構(gòu)。如果只是把行為定義為行走的話當(dāng)然很簡(jiǎn)單,我們就可以設(shè)計(jì)反應(yīng)式控制來實(shí)現(xiàn)。隨著反應(yīng)式變得越來越復(fù)雜,就很難用反應(yīng)式結(jié)構(gòu)去實(shí)現(xiàn)了。這個(gè)事情我個(gè)人在看了這么多文獻(xiàn)之后,大概同樣是在1980年代,美國(guó)的James他提出了所謂4D/RCS結(jié)構(gòu),已經(jīng)是非常完備的或者非常好的方法或者是一個(gè)體系了,甚至他們也給出了一套工程化的方法,怎么設(shè)計(jì)一個(gè)復(fù)雜的機(jī)器人系統(tǒng)或者是無人車,我們自己也是基本上參照4D/RCS這樣復(fù)雜系統(tǒng)的控制結(jié)構(gòu)來設(shè)計(jì)我們的無人車的。
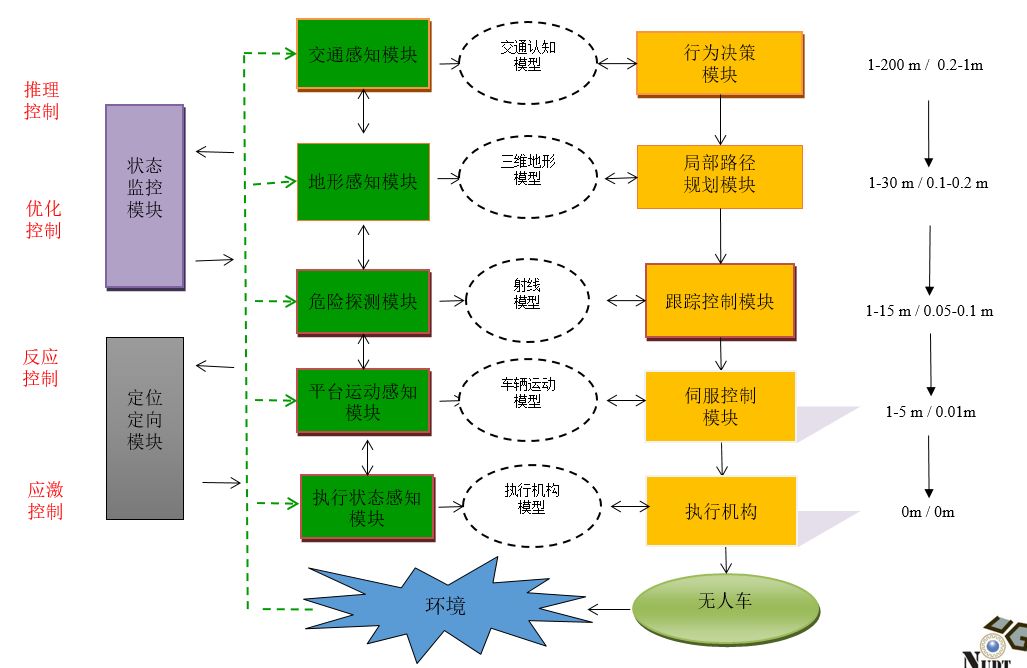
這是我們的無人車采取的一種結(jié)構(gòu),下面最基本的就是底層的執(zhí)行結(jié)構(gòu)以及到上面的交通,對(duì)交通場(chǎng)景的認(rèn)知、決策等等。只有知道了結(jié)構(gòu),我們反過來才能說機(jī)器學(xué)習(xí)在無人車中怎么用,我們剛才說了,對(duì)于無人車來說,它的核心就是人工智能程序,機(jī)器學(xué)習(xí)又是人工智能里面的一個(gè)重要的內(nèi)容,大家當(dāng)然就想著,是不是能夠把機(jī)器學(xué)習(xí)用在無人車上,讓無人車能夠變得越來越聰明,能夠越來越好的去適應(yīng)環(huán)境,我們就一起來看一看機(jī)器學(xué)習(xí)在無人車上到底能怎么用。
丨機(jī)器學(xué)習(xí)的端對(duì)端控制
當(dāng)然一種應(yīng)用就是針對(duì)我們前面說反應(yīng)式的結(jié)構(gòu),假設(shè)整個(gè)控制器我們不管它的內(nèi)部結(jié)構(gòu),完全由一個(gè)神經(jīng)網(wǎng)絡(luò)這樣的程序來解決,這個(gè)大概就是現(xiàn)在比較端對(duì)端的控制,什么意思?直接從傳感器到車輛的動(dòng)作,這就是所謂的端對(duì)端的學(xué)習(xí)控制,端對(duì)端本身也不是新鮮的事物,在1989年的時(shí)候美國(guó)機(jī)器人研究所就用當(dāng)時(shí)的三層網(wǎng)絡(luò)就實(shí)現(xiàn)了簡(jiǎn)單的無人駕駛,因?yàn)楫?dāng)時(shí)的網(wǎng)絡(luò)它的標(biāo)定能力是非常有限的,因此它能夠完成的任務(wù)也是非常簡(jiǎn)單的。
神經(jīng)網(wǎng)絡(luò)大家知道從80年代到90年代甚至到2000年之后很長(zhǎng)一段時(shí)間,發(fā)展是非常非常緩慢的,目前兩種方案,一種是前饋神經(jīng)網(wǎng)絡(luò),一種基于遞歸神經(jīng)網(wǎng)絡(luò),都在做一些研究。
大家可以看到上面這個(gè)視頻,英偉達(dá)在2016年的神經(jīng)網(wǎng)絡(luò)端對(duì)端控制,說到這里是不是用端對(duì)端學(xué)習(xí)控制這個(gè)問題就解決了,實(shí)際上大家仔細(xì)看是不可能的,前面有一個(gè)十字路口,用端對(duì)端學(xué)習(xí)控制怎么能夠?qū)崿F(xiàn)讓車選擇不同的路線呢?這個(gè)事情在他做的這個(gè)實(shí)驗(yàn)里面就不涉及到這個(gè)問題。
實(shí)際上這個(gè)問題英偉達(dá)做這個(gè)實(shí)驗(yàn)還有很多問題沒有解決,從控制上來說,車要適應(yīng)不同的坡路和材質(zhì),這個(gè)本身就是很復(fù)雜的,對(duì)于剛才說的端對(duì)端的學(xué)習(xí)控制,要做采集數(shù)據(jù)是非常困難的,而網(wǎng)絡(luò)本身結(jié)構(gòu)也沒有辦法支持,退而求其次就有其他的研究,大家去看一下Deep Driving:Learning Affordance for Direct Perception in Autonomous Driving這篇文章,這個(gè)想法就跟這個(gè)端對(duì)端不太一樣,它把這個(gè)系統(tǒng)分為控制和感知,把控制環(huán)節(jié)還是用控制的方法去做,但是后面感知希望用神經(jīng)網(wǎng)絡(luò)來解決,設(shè)計(jì)一個(gè)神經(jīng)網(wǎng)絡(luò),輸入一個(gè)圖象,輸出就是車道和車道上的線得到這樣一個(gè)抽象的模型,把這個(gè)模型再由后端輸入再去控制車輛運(yùn)動(dòng),這個(gè)是他們展示的一段視頻,這個(gè)是神經(jīng)網(wǎng)絡(luò)的輸入,這個(gè)就是網(wǎng)絡(luò)的輸出,后端控制的輸入,這是他們做的一個(gè)實(shí)驗(yàn)。
這種端對(duì)端的方案,我感覺下面幾個(gè)問題對(duì)他來說可能是比較重要的,最大的問題相對(duì)于我們說的駕駛?cè)蝿?wù),現(xiàn)有的網(wǎng)絡(luò)結(jié)構(gòu)還是太簡(jiǎn)單了,表達(dá)能力非常有限。
首先我們可以看,從數(shù)據(jù)的意義上來說,你要完成一個(gè)駕駛?cè)蝿?wù),你拿到的數(shù)據(jù)有任務(wù)信息,有離線地理信息,有環(huán)境信息還有本體的運(yùn)動(dòng)狀態(tài)等等,對(duì)于這樣一些完全異質(zhì)的信息,我們?cè)O(shè)計(jì)一個(gè)什么樣網(wǎng)絡(luò)結(jié)構(gòu)才能綜合起來實(shí)現(xiàn)車輛的駕駛,這個(gè)本身我認(rèn)為是一個(gè)比較大的問題。第二就是我們選擇困境,在不同的路網(wǎng)里面,你碰到十字路口的到底怎么走,可能很難解決。如果用端對(duì)端的方案可能很難解決這個(gè)問題。還有第三個(gè)比如說駕駛行為在時(shí)間上的不確定性,實(shí)際上它的復(fù)雜性是非常非常大的,也是現(xiàn)在很難解決的一個(gè)問題。這是我們說的端對(duì)端的學(xué)習(xí)控制。
丨慎思式結(jié)構(gòu)中的機(jī)器學(xué)習(xí)
我們能不能把機(jī)器學(xué)習(xí)慎思式方案用到無人駕駛里面去,很多研究用機(jī)器學(xué)習(xí)去提取交通場(chǎng)景中的各種各樣的交通物體,道路環(huán)境等等,用深度神經(jīng)元網(wǎng)絡(luò)實(shí)現(xiàn)場(chǎng)景中的各種交通物體,道路、建筑物的一個(gè)分割,把它作為下一步的決策規(guī)劃的輸入。再比如說對(duì)于我們知道現(xiàn)在無人車頭上都頂著一個(gè)激光雷達(dá),也可以用深度神經(jīng)原的方法進(jìn)行處理獲取道路上各種各樣的物體,交通標(biāo)志的信息等等。這個(gè)實(shí)際上用深度學(xué)習(xí)在做這種三維微場(chǎng)景分析,這也是目前用深度學(xué)習(xí)來解決環(huán)境的一個(gè)重要的研究方向。
我們說了,可以用它去解決物體的識(shí)別,場(chǎng)景的分析問題,當(dāng)然也可以用它解決決策規(guī)劃問題。近年來,我覺得做的比較好的工作就是他們提出的ChauffeurNet,他做的工作就是設(shè)計(jì)一個(gè)非常復(fù)雜的網(wǎng)絡(luò)結(jié)構(gòu),要來實(shí)現(xiàn)異質(zhì)數(shù)據(jù)的處理融合,這是他們?cè)O(shè)計(jì)的整個(gè)網(wǎng)絡(luò)結(jié)構(gòu),用來把各種各樣的信息能夠融合到整個(gè)駕駛過程中去,這是我們說的從決策的角度,當(dāng)然也有人研究用機(jī)器學(xué)習(xí)解決控制問題。
丨國(guó)防科技大學(xué)無人駕駛團(tuán)隊(duì)實(shí)踐
現(xiàn)在我們回到我們團(tuán)隊(duì),我們這些年在這方面也做了很多研究工作,我們用學(xué)習(xí)解決車輛控制,車輛縱向控制,甚至包括像我們把這個(gè)環(huán)境變成一個(gè)多車道的模型,實(shí)現(xiàn)無人車在環(huán)境里面的自主決策等等,這也是用機(jī)器學(xué)習(xí)做的。我們有兩個(gè)博士生在這一塊做的非常好,一個(gè)是基于廣義Haar濾波器的實(shí)時(shí)目標(biāo)檢測(cè),我們?cè)诳紤]能夠壓縮計(jì)算資源,使得利用十分之一或者五分之一的資源來實(shí)現(xiàn)同樣類似的效果,這對(duì)于機(jī)器學(xué)習(xí)的應(yīng)用應(yīng)該說是有非常幫助的。另外我們也做了交通場(chǎng)景的多任務(wù)學(xué)習(xí),什么意思?一個(gè)神經(jīng)網(wǎng)絡(luò)能夠?qū)崿F(xiàn)多個(gè)任務(wù),像今天早上有院士做報(bào)告也說到這個(gè)問題,對(duì)于人工智能是一個(gè)困難,我們也在做這方面的嘗試,這是我們自己做的實(shí)際的情況,包括物體的分割,行為場(chǎng)景的分割等等。
另外我們?cè)谟洃浭骄W(wǎng)絡(luò),在目標(biāo)檢測(cè)方面的應(yīng)用也做了很多工作。什么意思呢?大家有沒有注意到,所謂的深度神經(jīng)網(wǎng)絡(luò)往往需要人工去標(biāo)注大量的樣本,這很顯然是很復(fù)雜的工作,我們做的探索是怎么能夠?qū)崿F(xiàn)目標(biāo)檢測(cè),實(shí)現(xiàn)機(jī)器學(xué)習(xí)。這個(gè)如果大家感興趣可以下去關(guān)注一下我們做的工作,應(yīng)該說是比較好的,當(dāng)然它的基本原理就是我們首先在靜態(tài)的情況下拍一些視頻。我是在靜態(tài)的環(huán)境、背景下去檢測(cè)動(dòng)態(tài)的目標(biāo),通過這個(gè)辦法不斷地收集大量的樣本,然后再把學(xué)習(xí)好的檢測(cè)器用在一個(gè)動(dòng)態(tài)的載體上,這是我們已經(jīng)做的一些工作。
最后我說一下自己對(duì)這個(gè)事的一點(diǎn)理解:第一說我們機(jī)器學(xué)習(xí)對(duì)于解決無人駕駛的問題是非常非常重要的,但是它不是全部,它只能解決其中一部分問題。第二深度神經(jīng)網(wǎng)絡(luò)它場(chǎng)景建模與理解的有力工具。第三統(tǒng)計(jì)學(xué)習(xí)、增強(qiáng)學(xué)習(xí)對(duì)于解決行為決策問題會(huì)有所幫助,但是目前看來前提是必須要由人工建立一個(gè)合適的決策模型的基礎(chǔ)上用學(xué)習(xí)的方法來實(shí)現(xiàn)決策的前件的學(xué)習(xí)。第四是用積極學(xué)習(xí)的方法解決動(dòng)力學(xué)控制問題,這個(gè)問題按說傳統(tǒng)方法已經(jīng)解決比較好了,但是對(duì)于機(jī)器學(xué)習(xí)來說,好象沒有那么簡(jiǎn)單,反而是比較復(fù)雜的問題。第五能夠?qū)崿F(xiàn)任務(wù)、本體狀態(tài)、環(huán)境信息并行輸入的網(wǎng)絡(luò)結(jié)構(gòu)應(yīng)該是未來把機(jī)器學(xué)習(xí)用在無人駕駛上的一個(gè)研究重點(diǎn)。第六現(xiàn)有的計(jì)算能力仍不足以支持神經(jīng)網(wǎng)絡(luò)在無人車中的大規(guī)模應(yīng)用。
-
機(jī)器學(xué)習(xí)
+關(guān)注
關(guān)注
66文章
8507瀏覽量
134735 -
無人駕駛
+關(guān)注
關(guān)注
99文章
4180瀏覽量
123696
原文標(biāo)題:機(jī)器學(xué)習(xí)在無人駕駛中的應(yīng)用現(xiàn)狀及面臨挑戰(zhàn)
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智行者科技無人駕駛小巴落地海南

無人駕駛技術(shù)未來在哪里?低速才是突破口

易控智駕發(fā)布礦山無人駕駛應(yīng)用落地成果
為什么聊自動(dòng)駕駛的越來越多,聊無人駕駛的越來越少?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論