 Waymo用AutoML自動生成機器學習模型
Waymo用AutoML自動生成機器學習模型
Waymo十周年之際,發布了自動駕駛機器學習模型的構建思路,原來很多內部機器學習架構是由 AutoML 完成的。這種自動機器學習算法在激光雷達分割任務中,比人工創建的網絡質量更高。在代理端到端搜索中,甚至發現了卷積、池化和反卷積操作的創造性組合,不禁讓人感嘆算法工程師要失業?
AutoML 全稱是 Automated Machine Learning,是2014年以來,機器學習和深度學習領域最炙手可熱的領域之一。2017年5月,谷歌在I/O大會上推出基于TensorFlow 框架下的AutoML,它可以通過神經網絡來設計神經網絡,節省人工設計的時間,其對專業知識的較低,讓非機器學習專家也能輕松上手。而在近日waymo十周年上曝光,其AutoML 已經用來設計應用于自動駕駛上的機器學習算法。
在Waymo,機器學習幾乎應用在自動駕駛系統的每個角落。它可以幫助無人車感知周圍環境,了解世界,預測其他人的行為方式,并預測他們的下一步行動。
以感知為例,Waymo的系統采用了神經網絡的組合,使無人車能夠解讀傳感器數據、識別物體,并隨著時間的推移跟蹤它們,從而對周圍的世界有一個深入的了解。這些神經網絡的創建通常是一項耗時的任務,優化神經網絡架構以實現在自動駕駛汽車上運行所需的質量和速度是一個復雜的微調過程,需要花費工程師數月時間完成任務。
通過與谷歌AI大腦團隊研究人員合作,應用AutoML將前沿研究付諸實踐,以自動生成神經網絡。更重要的是,這些最先進的神經網絡比工程師手動微調質量更高和速度更快。
Waymo 為了將自動駕駛技術應用到不同的城市和環境中,需要以極快的速度優化現有模型以適應不同的場景。恰好 AutoML 能夠做到這一點,并高效,持續地提供大量的ML解決方案。
應用現有的AutoML框架進行遷移學習
Auto ML能否為汽車生成高質量、低延遲的神經網絡?
質量往往是衡量一個神經網絡產生的答案的準確性的標準,延遲數據決定了神經網絡提供答案的速度,也稱為推理時間。由于自動駕駛是一項需要無人車快速做出決定以保證安全的系統,因此神經網絡需要保證在低延遲下進行。運行在Waymo無人車上的大多數網絡,延遲都少于10毫秒,這比部署在數千臺服務器上的數據中心中的許多網絡都要快。
Google AI團隊在2018年4月發表的論文(Learning Transferable Architectures for Scalable ImageRecognition)中,能夠自動探索超過12,000種架構來完成 CIFAR-10 數據集的經典圖像識別任務,其中發現的自我創建的NAS單元比手工創建神經網絡更好。將在CIFAR-10上學到的知識轉移到自動駕駛任務中,它可以很好的完成語義分割的任務,比如將LiDAR點云中的每個點標識為汽車,行人,樹等。

NAS單元處理神經網絡中前兩個層的輸入
通過構建一種自動搜索算法,在卷積網絡架構(CNN)中探索數百種不同的NAS單元組合,進行 LiDAR 分割任務訓練和評估模型。如果采用人工微調,只能探索有限數量的架構,但通過這種方法,自動探索了數百個。
相比人工微調優化神經網絡,AutoML輸出的神經網絡做到了低延遲、高質量效果。
初步成功后,Waymo將相同的搜索算法應用于另外兩個與交通車道檢測和定位相關的任務,遷移學習技術也適用于這些任務,最后能夠在無人車上部署三個新訓練和改進的神經網絡。
端到端搜索:從頭開始搜索新的架構
發現AutoML巨大潛力后,Waymo開始思考是否可以更進一步、更廣泛地尋找能夠提供更好結果的全新架構。不局限于NAS單元,可以更直接地找到延遲在限定范圍內的架構。
進行端到端搜索往往需要手動探索數千個架構,需要大量的計算成本。找到單一架構需要在多個GPU的計算機上訓練好幾天,這意味著搜索單個任務需要數千天的計算時間。相反,通過設計一個代理任務:一個縮小的激光雷達分割任務,可以在幾個小時內解決。
這就意味著需要找到一個與最初的細分任務足夠相似的代理任務。在確定代理任務上的架構質量與原始任務上的架構質量之間的良好相關性之前,對幾個代理任務設計進行試驗。然后,啟動一個類似于AutoML論文的搜索,完成一個端到端代理搜索。這是這個概念第一次應用在激光雷達數據上。
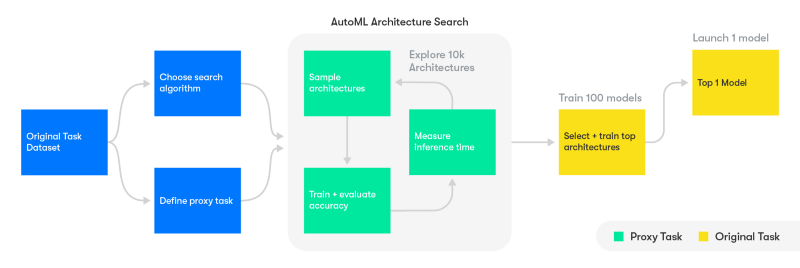
代理端到端搜索:在按比例縮小的代理任務中探索數千個架構,將100個最佳應用程序應用于原始任務,驗證并部署最佳的最佳體系結構。
通過使用幾種搜索算法,優化質量和延遲。查看不同類型的CNN架構并使用不同的搜索策略,如隨機搜索和強化學習,能夠為代理任務探索10,000多種不同的架構。通過使用代理任務,在Google TPU集群上花費一年多的計算時間現在只需要兩周時間。在NAS單元之外,我們發現了比以前更好的神經網路,它在相同的質量下,神經網絡的延遲降低20-30%;具有更高質量的神經網絡,錯誤率降低8-10%,與以前的架構具有相同的延遲。
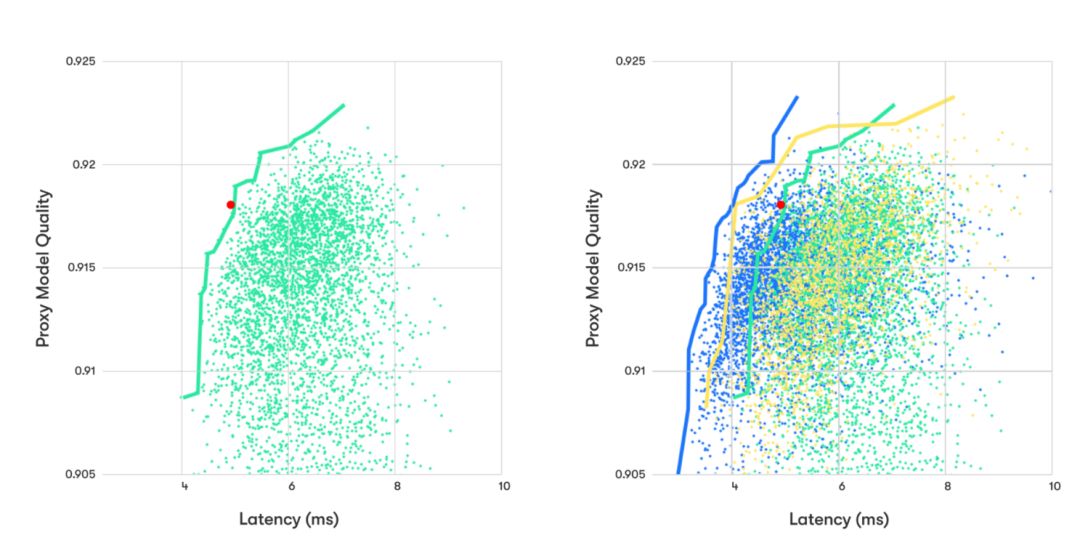
左圖展示了在一組簡單的架構上隨機搜索發現的大約4000個架構。每個點都是一個經過訓練和評估的架構。實線表示不同推理時間約束下的最佳架構,紅點表示用遷移學習構建的網絡的延遲和性能。在這種隨機搜索中,網絡學習效果不如遷移學習。右圖中,黃色和藍色的點表示另外兩種搜索算法的結果。黃色的是對一組精致架構的隨機搜索。藍色的那個使用了強化學習,探索了6000多個架構。它產生了最好的結果。這兩個額外的搜索發現,該網絡明顯優于遷移學習的網絡。
在搜索中發現的一些架構采用了卷積、池化和反卷積操作的創造性組合,如下圖所示。這些架構最終非常適合最初的激光雷達分割任務,并將部署在Waymo的自動駕駛汽車上。

由代理端到端搜索發現的一種神經網絡結構。
Waymo與Google AI合作,應用 AutoML 在無人駕駛上的實踐僅僅是個開始。對于激光雷達分割任務,傳輸學習和代理端到端搜索都提供了比人工創建更好的網絡,這些機制應用到新的任務類型上,可以改善許多其他的神經網絡。這一發展為未來的ML工作開辟了新的道路,并提高了Waymo的自動駕駛技術的性能和能力。
看到這里是不是覺得很興奮,自己費盡心思搭的神經網路,AutoML 只需很短的時間就能得出高質量的網絡結構。當然,目前谷歌只開源了輕量級 AutoML 框架——AdaNet。
-
機器學習
+關注
關注
66文章
8407瀏覽量
132567 -
waymo
+關注
關注
2文章
312瀏覽量
24670
原文標題:算法工程師要失業?Waymo嘗試用AutoML自動生成機器學習模型
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論