 基于仿真的自動駕駛汽車通用工具鏈 用于模型在環識別
基于仿真的自動駕駛汽車通用工具鏈 用于模型在環識別
汽車行業面臨的主要挑戰之一是智能網聯汽車的測試和驗證。一方面,需要新的測試方法以改進傳統路測方法,解決傳統測試中需要大量行駛里程所帶來的一些問題。另一方面,由于發展初期有限的市場滲透率,測試驗證過程還需考慮混合交通環境下其他人類交通參與者的駕駛行為對自動駕駛汽車功能產生的重大影響。本文介紹了一種基于仿真的自動駕駛汽車通用工具鏈,用于關鍵場景(Critical scenario)的模型在環識別。該方法結合汽車動力學仿真、交通仿真和車輛協同仿真進行場景識別,并考慮了其他交通參與者的行為。最后通過安全指標和交通質量指標評估并篩選得到關鍵場景。
引言
由于初期市場滲透率較小,智能網聯汽車的發展受到阻礙。在不考慮其他交通參與者駕駛行為的情況下引入這類汽車相對簡單,但是其在包括人類駕駛員的混合交通環境下完成行駛任務將面臨巨大挑戰。即使自動化功能正常工作且駕駛行為符合規范,其他交通參與者也可能導致自動駕駛汽車面臨關鍵場景。圖1顯示了與人類駕駛員的復雜交互所引起的關鍵場景的示例,頂部為初始狀態,底部為最終狀態。其中汽車1是智能網聯汽車,汽車2、3由人類控制。汽車2的駕駛員駕駛行為較為激進,而汽車3的駕駛員駕駛行為相對保守。首先,汽車1自動檢測到可以執行變道行為的理想情況。當其進行變道時,汽車2忽視安全間隙而緊跟汽車1,同時汽車3駕駛非常謹慎,便可能導致圖1所示關鍵場景。本文后續介紹基于該具體場景展開。

圖1 智能網聯汽車V1關鍵場景
基于仿真的通用工具鏈
識別關鍵場景是驗證智能網聯汽車的關鍵環節,在本文中,關鍵場景被定義為需要進行測試的場景。
本文使用了一個基于仿真的通用工具鏈(圖2)解決識別關鍵場景的問題。該工具鏈由邏輯場景(Logical scenarios)開始,邏輯場景是基于參數空間的場景描述,通過確定參數空間中各參數的取值范圍,來限制可能的測試場景。
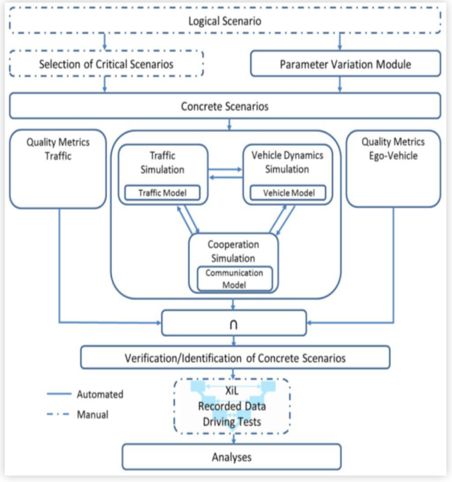
圖2 基于仿真工具鏈的智能網聯汽車關鍵場景驗證與識別
邏輯場景參數空間中選擇特定參數便構成了具體場景(Concrete scenarios)。參數選擇的一種方式如工具鏈左側所示(圖2),通過使用專家意見、數據記錄、場景目錄等確定關鍵場景的方式的主要缺點是容易遺漏一些關鍵場景。本文選擇工具鏈右側方式,即使用參數變化模塊,該模塊通過自動更改邏輯場景的參數來創建具體場景,這是在整個參數范圍內識別關鍵場景的一種簡單方法。使用該方式的主要挑戰是,在應用工具鏈之前,關鍵場景及其特性是未知的,因此很難確定哪些參數組合被選取后需要更仔細和全面的去測試。
為了解決這一問題,將上述方法生成的具體場景用于仿真環境的輸入,該仿真包括耦合交通仿真、汽車動力學仿真和車輛協同仿真三部分。交通仿真為汽車提供周圍交通環境;汽車動力學仿真為汽車提供詳細動力學模型以及需要被測試的自動駕駛功能;汽車協同仿真包括信息交互模型。然后,將量身定制的評價指標應用于仿真結果,根據仿真結果是否滿足評價指標標準,從而將具體場景自動分類為關鍵或非關鍵場景。根據感興趣的領域不同,工具鏈可以使用不同類型的評價指標。在本文中,將使用安全和交通質量作為評價指標。
識別出的關鍵的具體場景可以被應用于V型開發模型的各個階段,包括模型在環(MiL)、軟件在環(SiL)、硬件在環(HiL)、汽車在環(ViL)等,并記錄數據。工具鏈的最后是對測試結果的分析,從而對功能開發進行反饋。
本文中使用高速公路自動駕駛的例子來演示工具鏈的應用過程,該工具鏈也可以擴展到其他功能和領域,例如鄉村道路以及城市區域。
仿真環境
使用耦合仿真要求虛擬環境具有可比性。不同虛擬環境不一定需要完全相同,但基本幾何信息必須足夠相似,以使動態耦合在這些環境中都適用。靜態耦合是基于OpenDrive格式提供的實測數據集,地圖數據轉換方案如圖3所示。
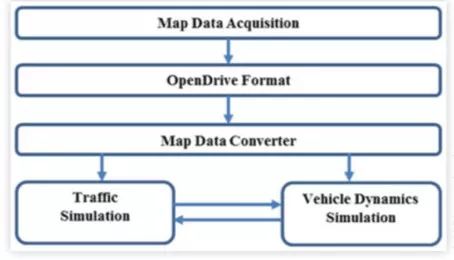
圖3 仿真環境的靜態耦合和映射數據轉換
地圖數據通過所選道路的高精度測量來獲取。本文選擇了位于法蘭克福(德國)附近的歐寶試驗場。圖3所示的地圖數據轉換器是一種數據轉換工具,可將OpenDrive格式的數據解析為特定仿真環境中所需的特定格式。
動態耦合主要集中在交通仿真和汽車動力學仿真上。本文作者研究的可變區域如圖4所示。
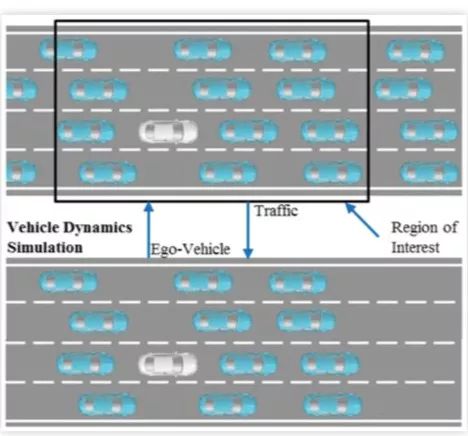
圖4 可變區域的動態耦合
交通仿真提供交通參與者行為,汽車動力學仿真提供智能網聯汽車行為,包括駕駛功能和傳感器設置等。協同仿真在本文中將不做討論。動態耦合確保了智能網聯汽車能夠在周圍的交通環境中行駛,從而提供能夠響應汽車駕駛功能的駕駛行為的動態交通環境。
安全指標和交通質量指標
本文基于傳統安全指標和交通質量指標來識別關鍵場景。對于安全指標,本文選定了碰撞時間TTC、制動時間TTB、期望減速度為臨界指標。對于交通質量指標,按關注的空間域(DOI)大小以及不同的交通表征,本文定義了宏觀指標、微觀指標、納米指標、個體指標四個子指標。
4.1 傳統安全指標
為了使用基于仿真的工具鏈識別關鍵場景,需要指定與危險程度相關的術語。很明顯,對臨界性的理解會隨著具體要求改變而有顯著的不同。工具鏈的通用設計允許使用不同的臨界項。最著名的臨界性指標為“碰撞時間”。

其中Δp是汽車位置的偏差,V_ego是自車速度,V_obj是對象速度,V_rel是兩車之間的相對速度。另一個標準度量稱為“制動時間”,可定義為:
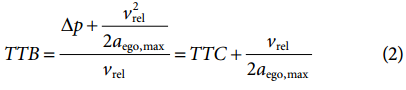
其中a_ego_max表示自車能夠執行的最大減速度。這個指標與自車的最大減速能力有關。最后一個指標稱為“期望減速度”,如下式

4.2 交通質量指標
為了研究智能網聯汽車及其對交通質量的影響,本文提出了四種交通質量指標和一種組合各指標的方法。該方法旨在為場景的臨界性評估收集更多信息。其優點是增加了結果的穩健性和有效性。指標的一般要求可以表述如下:
應識別每個關鍵情景
假陽性率(FPR,False positive rate)應該很低
評估應采用分級制度
應該有一個閾值,允許對組合的指標進行二進制分類
4.2.1 DOI界定和各指標選取
不同的交通指標關注的空間域不同。如圖5所示,本文有三個空間域。第一個是固定空間域(DOI),按照高速公路容量手冊的建議,它的尺度選擇為450m。第二個移動DOI(始終)跟隨著自車并直接關注周圍的環境,引入它是為了獲得關于汽車周圍影響的附加指示。第三個移動DOI只考慮自車。
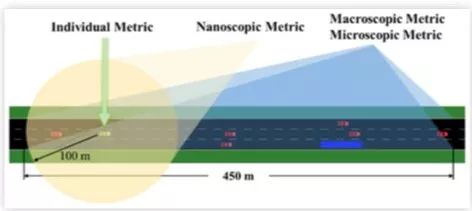
圖5 不同評價指標的DOI
第一個子指標是宏觀指標。該概念關注固定的DOI。

第二個子指標是微觀指標。它考慮固定DOI中的速度偏差和平均速度,把速度偏差除以自車的速度平均值的值作為微觀交通質量的表征。當關注總體交通質量時,需要在指定的DOI中考慮每輛車,在這里車的標號用索引j表示,并且可以表示為:

σ_vj為標準速度偏差,v_j是每輛車的平均速度。得到的平均變異系數CV由公式5的平均值計算。第一個移動的DOI是圍繞自車的圓圈,其允許考察近距離的交互。
第三個子指標是納米指標。它的計算是基于速度偏差和相對于DOI的平均值。

其中σ_vCircle_j是速度標準偏差和v_Circle_j是相對于DOI的平均速度。
第四個子指標是個體指標。這個指標僅考慮自車的數量。DOI僅圍繞自車,單獨考慮汽車的行為以收集有關評估過程的更多信息。
4.2.2 各指標等級歸一化
一個場景是否關鍵以及是否應進一步研究的決定是二元的,因此最好有一個特定的閾值區分關鍵和非關鍵場景。為了實現一個全面整體的評分系統,每個指標將被歸一化,“0”被定義為最佳等級,“1”被定義為最差等級。標準化評分系統可以表述如下,其中G_mac是宏觀指標的等級、G_mic是微觀指標的等級、G_nan是納米指標的等級、G_ind是個體指標的等級。
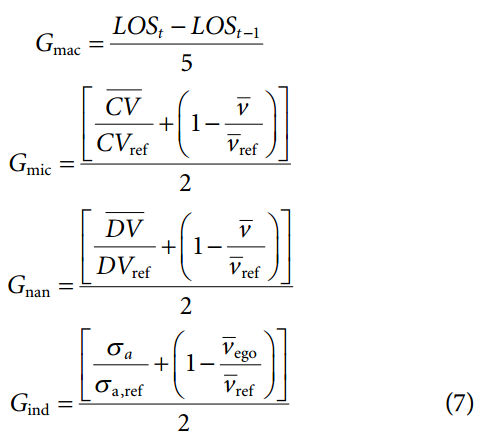
宏觀等級代表兩個時間間隔之間交通密度的變化。當自車引起的交通密度減小時,相關場景會被分類到關鍵場景中。
微觀等級考慮變異系數和平均速度之間的折衷。大的速度波動和低的平均速度會使場景被分類為關鍵場景,而小的波動和高的平均速度可以被歸類為理想的交通狀況。
納米等級使用平均速度作為附加指標,納米等級下的的變化系數和平均速度僅針對移動圓內的汽車計算,以考慮具有近距離交互作用的交通參與者。
個體等級也使用平均速度作為附加指標,它是通過加速度的標準偏差和自車本身的平均速度來計算的。大的加速度變化和低的平均速度會使場景被分類為關鍵場景。
4.2.3 總體指標計算
進行總體分級的最簡單方法是對指標求平均值,如公式8所示。

但這些指標的權重明顯不同。因此,作者利用由專家進行評價和分級的訓練數據,基于最小二乘法對加權系數進行了優化。目的是提高基于訓練數據的整體評價的穩健性。最終等級將以參數形式表示。

其中x_1...x_4是每個指標的各個等級,β_1...β_4是相應的加權因子。圖9顯示了優化方案。
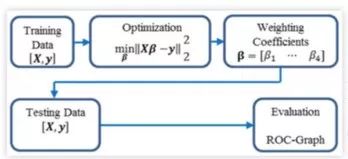
圖9 加權因子優化和指標績效評估
相關的誤差矩陣如圖10所示。
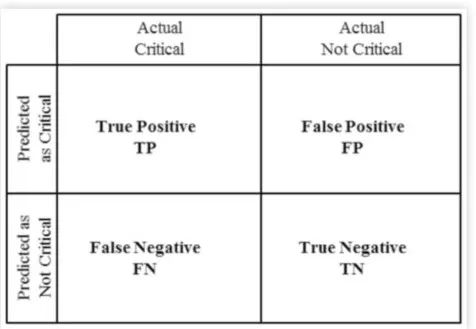
圖10 用于關鍵場景二進制分類的混淆矩陣
理想的狀況是,“真陽性率”(TPR,Truepositive rate)達到100%,同時保持低的假陽性率。圖11顯示了ROC-Graph中的優化結果。
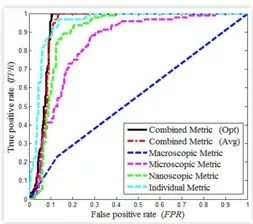
圖11 指標表現結果
可以看出,組合優化后的指標(圖11,黑色實線)效果最好。FPR約為10%,且滿足100%TPR的要求。
關鍵場景識別方法應用
本示例將SAE-Level 3高速公路執行標準駕駛任務作為用例,評估過程通過前文提出的安全和交通質量指標來完成,其中臨界分類的相應閾值為G_final = 0.279,TTC = 3.9 s,TTB = 3.8 s,a_req = - 2 m/s^2 。本文一共選擇四個不同的進入高速公路場景進行實驗。
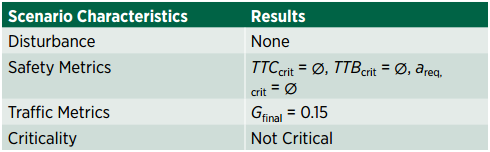
場景一為無任何干擾,自車以規范行為進入高速公路的場景。此場景是為了說明指標確實將最佳行為歸類為不關鍵場景。結果如表1所示。評價結果表明指標不會偏離(由空集Φ表示),場景未被識別為關鍵場景。
表1具體場景:自車無干擾進入高速公路
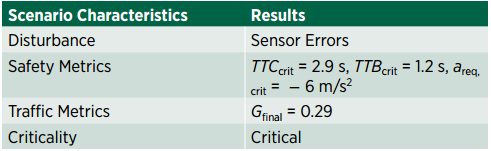
場景二為進入受干擾而導致傳感器誤差的高速公路場景。該場景會導致自車的路徑跟蹤控制器產生波動。使用相同指定屬性來選擇相同的邏輯場景。仿真結果如表2所示。結果表明交通質量指標及安全相關指標都對自車控制器產生的波動作出了響應,因此該場景被歸類為關鍵場景。
表2 具體場景:自車帶有傳感器錯誤信息進入高速公路
場景三考慮了高精度地圖信息錯誤的情況。智能網聯汽車使用高精度地圖來增加預見性和制定駕駛策略,特別是在高速公路入口處,高精度地圖可以提供如到車道末端距離和允許進入高速公里的虛線起點位置等信息,地圖可能出現信息錯誤而不允許自車直接進入高速公路。仿真結果如表3所示。
表3 具體場景:自車帶有地圖錯誤信息進入高速公路
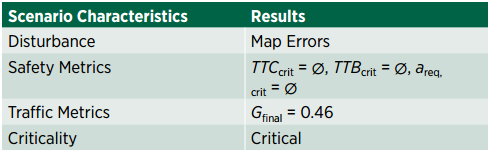
由于地圖信息錯誤,自車不能進入高速公路而在入口匝道上停車。L3級功能要求駕駛員在堵塞入口匝道時接管汽車。基于交通質量指標,此場景被正確地歸類為關鍵場景。由于自車沒有引起相關安全問題,因此安全指標沒有偏離。
場景四突出了其他交通參與者的行為及其對自動駕駛功能的影響。前文所述的其他交通參與者在仿真中的激進駕駛行為可以將自車逼到關鍵場景中。仿真結果見表4。
表4 具體場景:激進交通參與者進入高速公路
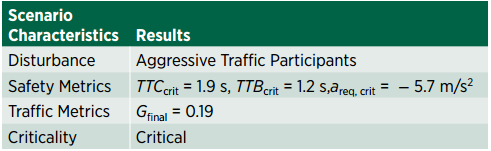
結果表明激進的駕駛行為會極大地影響與安全相關的指標。每個單一指標值在某一時間會下降到臨界閾值以下,因此這些場景是危險的,必須進一步測試。在本次仿真中,交通質量沒有顯著降低使得僅基于交通質量指標評價的場景被識別為不關鍵。
結論
本文介紹了一種基于仿真的工具鏈,用于識別和驗證智能網聯汽車的關鍵場景,并在包含傳感器錯誤、地圖錯誤和其他交通參與者激進駕駛行為的不同場景中應用了該方法。應用標準的安全指標和本文新提出的評估交通質量的指標進行場景分類,得到關鍵場景和相應數據,以作為測試結果用于功能開發人員改進相應自動駕駛功能。該方法中所提出的評估交通質量的不同指標的組合能夠對具體場景的關鍵性進行二元分類,并且該分類不是分開使用每一個子指標,而是側重于找到一個考慮整體識別過程的最終等級的臨界閾值。通過計算最終等級并將該值與使用訓練數據的優化方案確定的閾值進行比較,以確定具體場景是否關鍵。
-
自動駕駛
+關注
關注
784文章
13786瀏覽量
166404 -
智能網聯汽車
+關注
關注
9文章
1060瀏覽量
31078
原文標題:基于仿真的智能網聯汽車關鍵場景識別
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論