 詳細的單攝→雙攝→三攝→3D成像攝像頭產業鏈
詳細的單攝→雙攝→三攝→3D成像攝像頭產業鏈
隨著時代不斷發展,光電技術在各大應用領域遍地開花,中國光博會面向光通信/信息處理與儲存、消費電子、先進制造、國防安防、半導體加工、能源、傳感及測試測量、照明顯示、醫療等九大應用領域展示前沿技術及創新綜合解決方案。


光學變焦原理圖
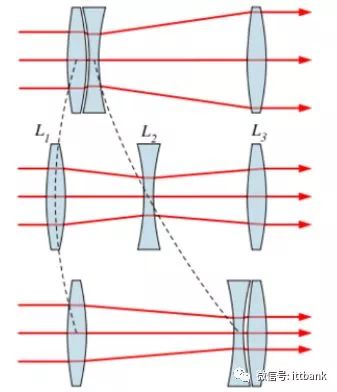

雙攝



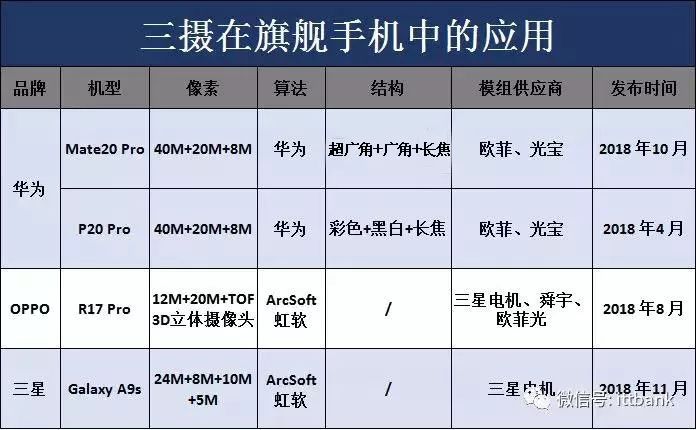
三攝

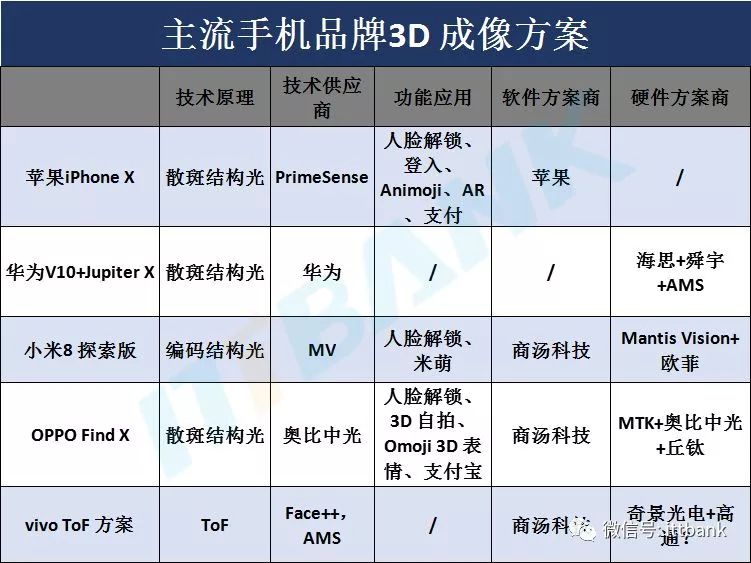
3D成像
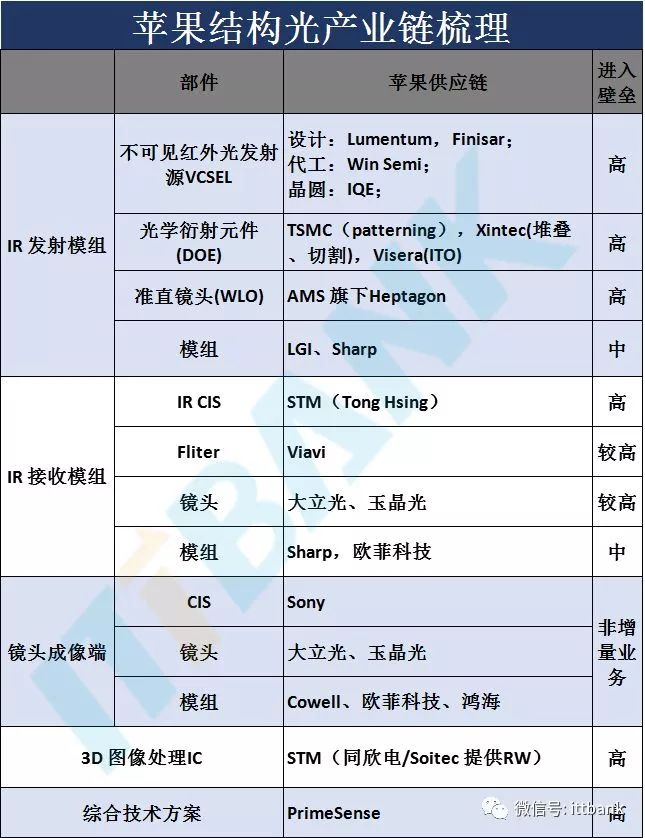
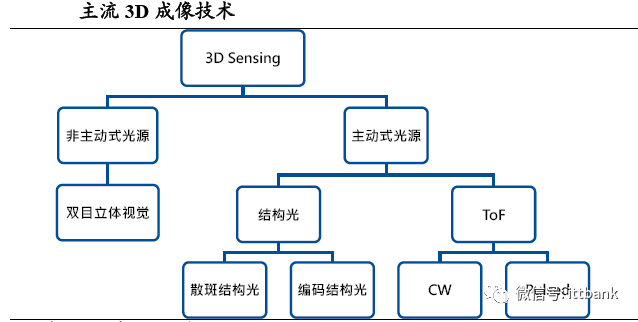
3D 成像技術主要有3 種:1)結構光(散斑結構光、編碼結構光);2)ToF-飛行時間法;3)雙目立體視覺。前兩種是主流。
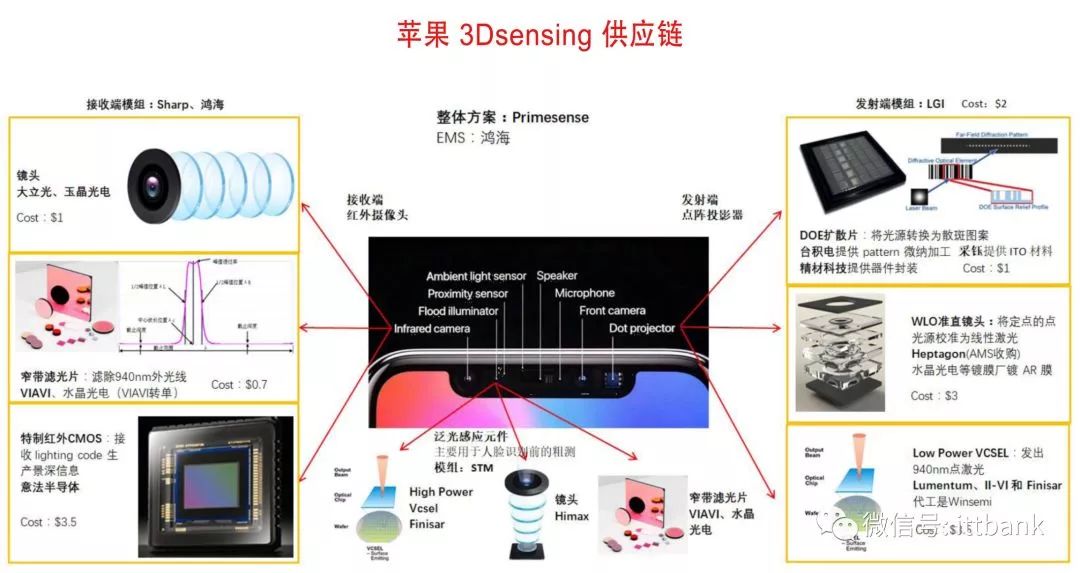
iPhone X 采用的 3D Sensing 核心元件包括點陣投影器(Dot projector)、接近傳感器(TOF)和泛光照明(Floodilluminator)等。


CMOS芯片PART/01
當前主流CMOS廠商可以被分為兩類。
1、采用自主一體化模式
從芯片設計->制造->封裝->檢測完全由公司獨自承擔完成,例如索尼和三星,,這類模式可發揮產品先發技術優勢,良率高,利潤獨享,供應鏈周期穩定等特點。
2、采用分段外包模式
自身設計芯片->制造商代加工->第三方封裝檢測
代表公司例如豪威(Omnivision)、安森美半導體(OnSemiconductor)、中國格科微等,中芯國際是格科微的制造商,晶方科技和昆山西鈦為其封裝檢測。
臺積電為豪威代加工,晶方科技和華天科技等為其完成封裝檢測;
這類模式主要針對同質化產品,可以迅速根據市場需求調整產能結構,轉嫁制造風險給代加工企業。
目前高端CMOS芯片系列:主要有三星主導ISO cell,和索尼主導背照式、堆棧式的IMX。
鏡頭PART/02
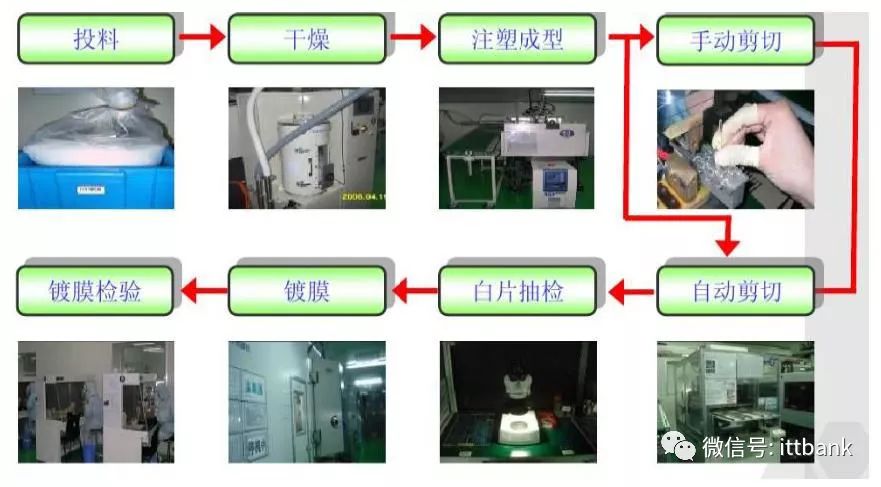
塑料鏡頭當道,注塑成型為主要生產工藝
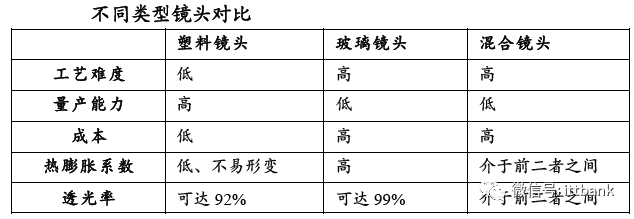
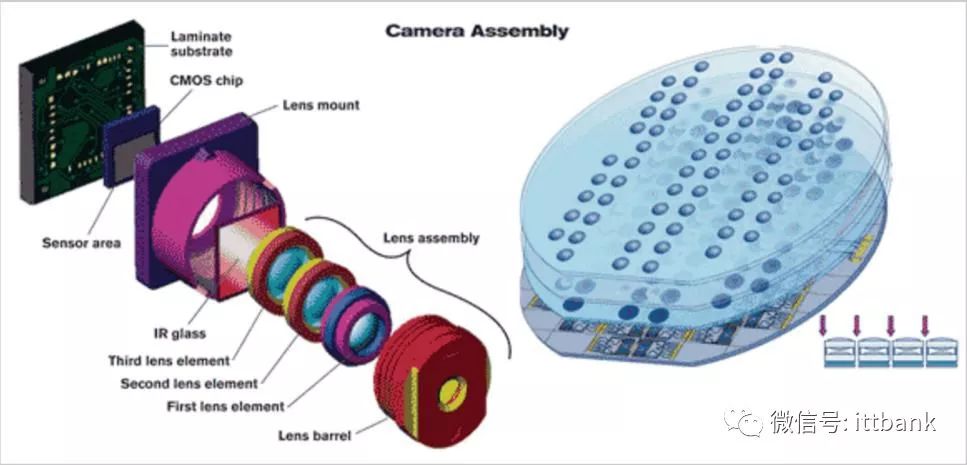
手機鏡頭(Lens)負責將光線聚焦至CIS,是決定手機攝像頭成像品質的重要部分。鏡頭一般是由幾片透鏡組成,其材料主要是球面玻璃(Glass,G)或非球面塑膠(Plastic,P)。玻璃的透光量和光損失表現比塑料鏡頭要好,但是成本更高,因此除了一些高端攝像設備,現在更多的鏡頭一般采用塑料材質。通過增加鏡片可以改變焦距,消除畸變,但過多會使得等效光圈變小。
手機鏡頭生產主要流程
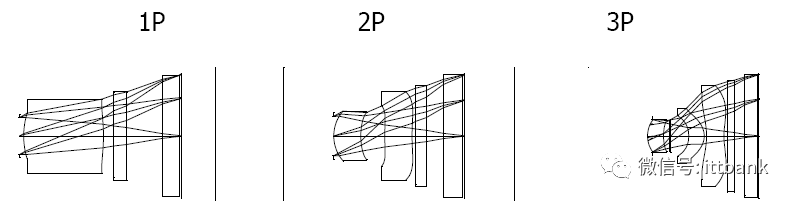
不同鏡片數量鏡頭
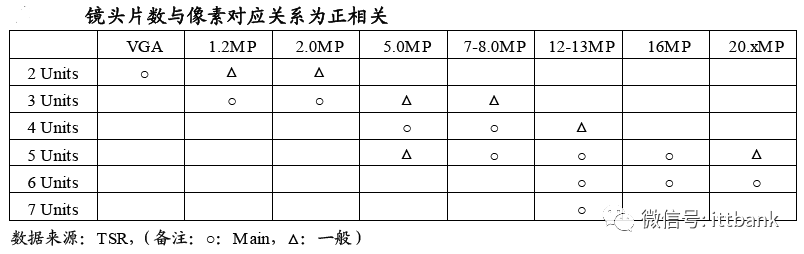
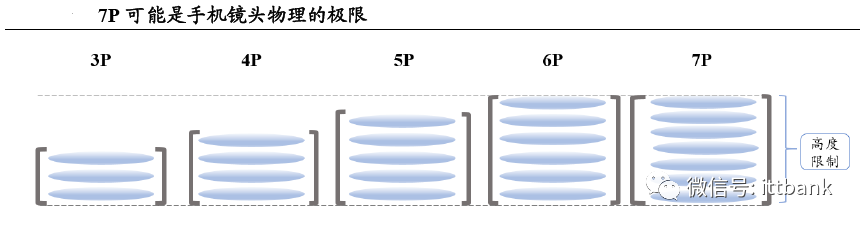
一般而言鏡頭片數越多,成像效果越好,高像素一般對應更多的鏡頭片數。在2MP 上3P 是主流,5MP 上4P 是主流,但也有為了實現低價而采用3P。8MP 采用4P 和5P,5P 為主流。12-13MP 采用了5P 和6P,也有對13MP 進行4P 產品化的情況。16-20MP 采用5-6P。
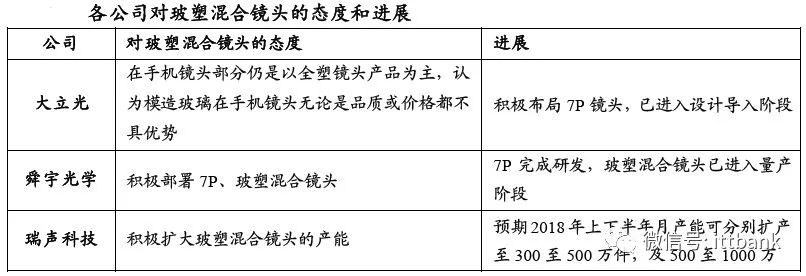
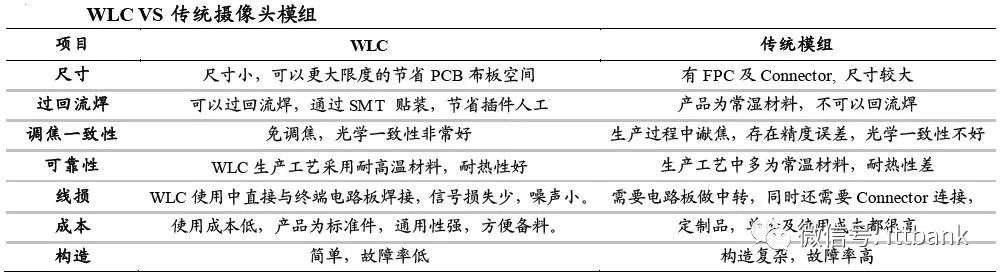
WLG(晶圓級模造玻璃)有望降低成本,推動玻塑混合鏡頭發展
傳統的玻璃鏡片生產主要依賴研磨,拋光等工藝,存在生產成本高,效率低等缺點。一種升級的加工手段為玻璃鏡片模造加工,通過將玻璃加熱軟化,之后利用具有高精密表面的成型模具加壓制成非球面形狀。
傳統玻璃加工VS 模造加工
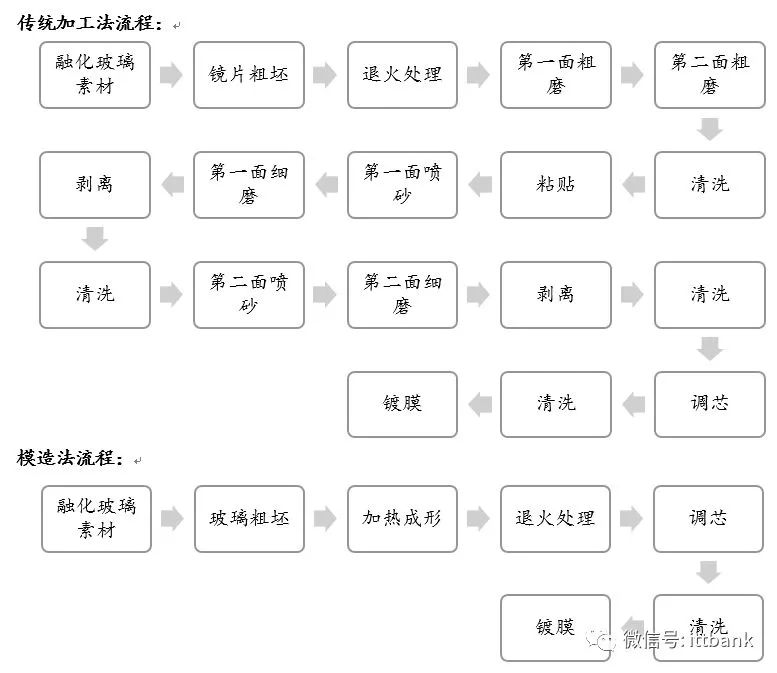
然而傳統的模造加工只能針對單個鏡片加工,加工效率低,成本高,因此晶圓級模造玻璃(WLG)因運而生。顧名思義,WLG 是對整片玻璃基板進行加熱壓縮,一次性制造多顆模造鏡片。晶圓級模造玻璃的模具的典型制造材料為硬質碳化鎢。
WLG 制造工藝
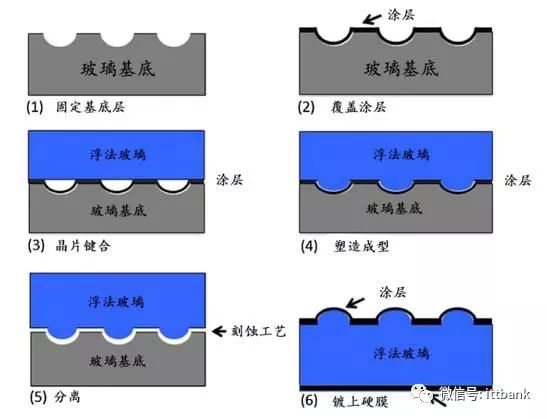
WLG 成品
WLO 尚無法支持高像素應用,準直鏡為其應用方向
WLO(晶圓級鏡頭)是指晶元級鏡頭制造技術和工藝,與傳統光學元件的加工技術不同,WLO 工藝在整片玻璃晶元上,用半導體工藝批量復制加工鏡頭,多個鏡頭晶元壓合在一起,然后切割成單顆鏡頭,具有尺寸小、高度低、一致性好等特點。
傳統鏡頭VS WLO(晶圓級鏡頭)
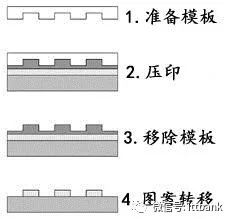
WLO 制造流程

WLO 壓印和光刻流程
馬達PART/03
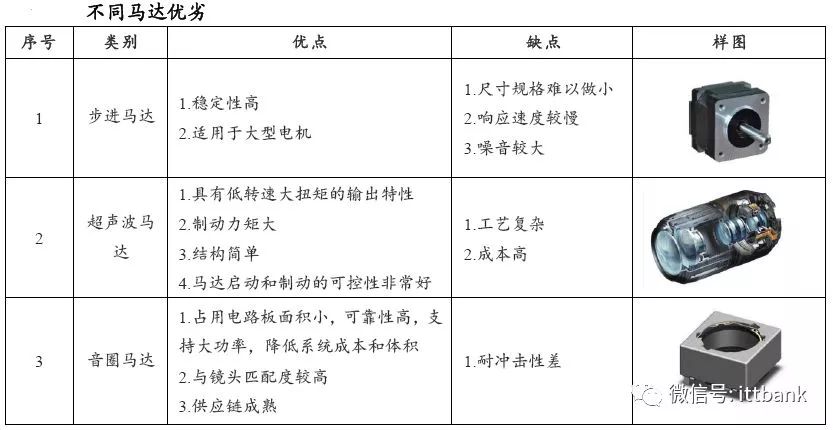
馬達在攝像模組中的作用主要是實現AF(自動對焦)與OIS(光學防抖),目前智能手機采用的馬達主要分為三種:步進馬達、超聲波馬達和音圈馬達。
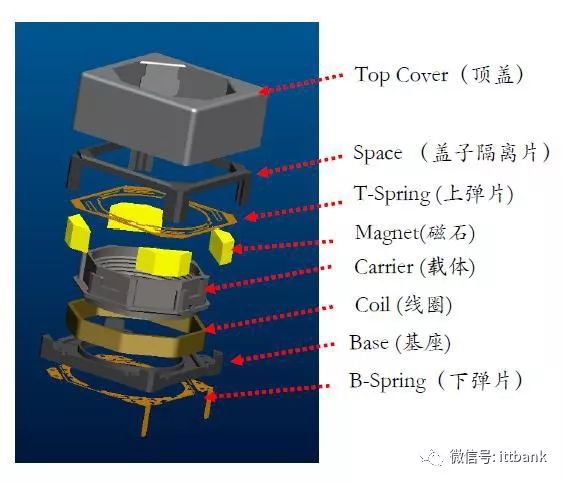
其中音圈馬達以其結構簡單、體積小等特點較好的契合了智能手機市場對于外觀的需求,是目前智能手機高精密微攝像頭主流應用技術。音圈馬達VCM (Voice Coil Motor) 屬于線性直流馬達的一種,其組成組件主要包括永久磁鐵、軛鐵與線圈三部分,是一種具有直接驅動、固定行程特性的致動器,所產生的推力與流經線圈電流成正比。音圈馬達從功能上可分為開馬達(Open loop)、閉環馬達(Close loop)、Alternate(中置馬達)、OIS 光學防抖馬達(分平移式、移軸式、記憶金屬式等)、OIS+Closeloop 六軸馬達。
VCM 結構
模組PART/04
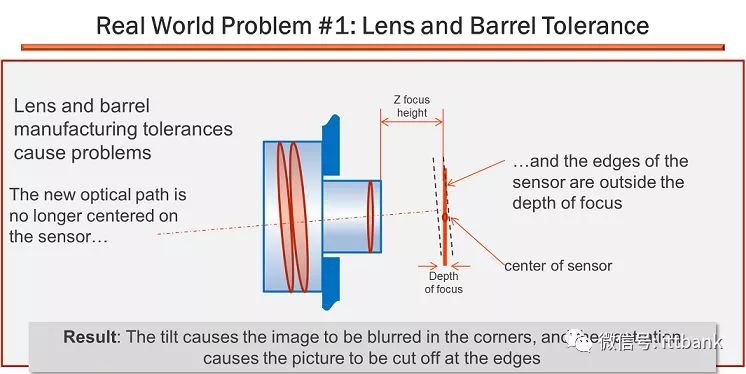
多攝需AA 制程,提高CCM 門檻:攝像頭模組的封裝涉及到圖像傳感器(CIS)、鏡頭、音圈馬達(VCM)、PCB 電路板等零配件的多次組裝,由于傳統的封裝工藝(如COB)一般是根據設備調節的參數進行零配件的移動裝配的,造成零配件的疊加公差越來越大,最終將導致成像最清晰位置偏離中心、畫質均勻性較差等諸多問題。例如:鏡頭可能會偏離垂直軸線一定角度,從而導致鏡頭中心和CIS 中心不在一個水平線上。因此邊角的圖像信息會損失。而傳統封裝工藝使得CIS 本身可能逆向偏離垂直軸線一個角度,從而使得邊角的損失更大。
傳統封裝帶來的誤差
對于這一問題的解決方案稱為AA(Active Alignment)主動對準技術,按照光學效果而非機械參數進行裝配。擁有AA 制程的設備在組裝每一個零配件時,設備將檢測被組裝的半成品,并根據被組裝半成品的實際情況主動對準,然后將下一個零配件組裝到位。AA 制程通過調節鏡頭對準至6 個自由度(X,Y,Z,θX,θY,θZ),即調節相對位置和鏡頭傾斜,可確保拍照畫面中心最清晰,以及提升畫質均勻性,產品一致性得到顯著提升。
AA 制程實現主動對準
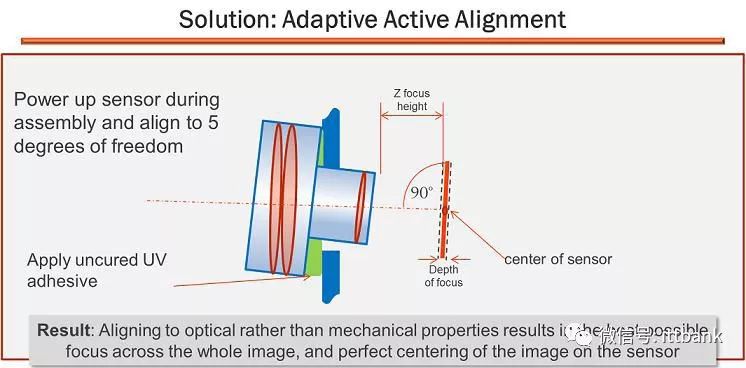
對于攝像頭模組廠而言:1)AA 制程技術難度大,要保證模組調度效率的一致性、穩定性和平衡性,對設備和工作人員要求較高;2)設備價格高,每臺價值30-40 萬美金,資金占用量大。但是在圖像傳感器像素持續走高和單像素面積不斷降低的大趨勢下,鏡頭與傳感器相對定位的準確性要求在不斷提高,傳統的封裝工藝已經力不從心,AA 制程已成為高質量攝像頭的門檻。
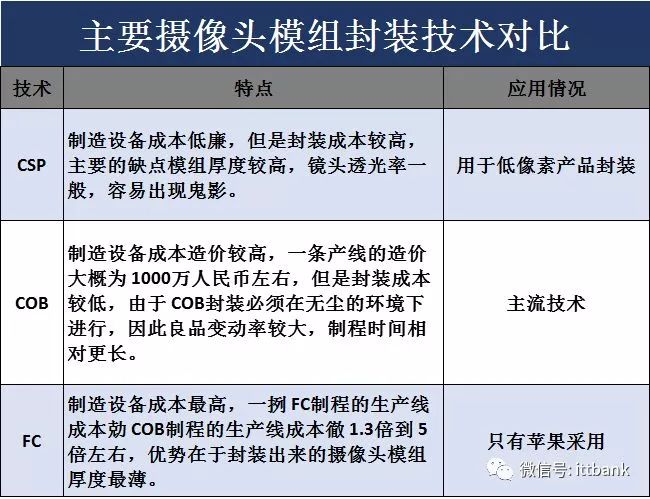
攝像頭模組主流的封裝技術分為三種,一種為CSP 技術(chip sizepackage),一種為COB 技術(chip on board),以及FC(flip chip)技術。
3D成像:結構光與ToF 將為3D 成像主流方案PART/04
結構光
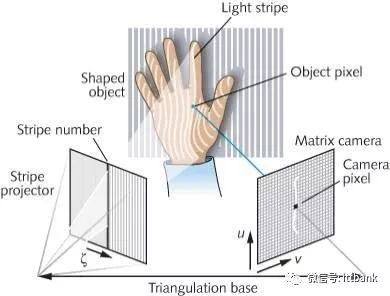
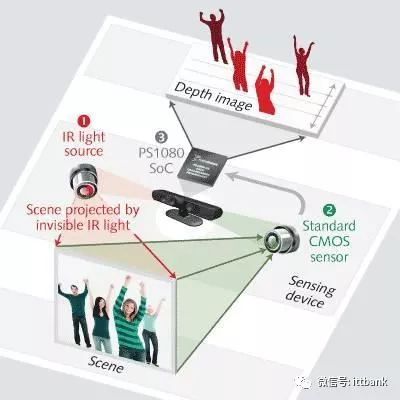
“結構光”指一些具有特定模式的光,其模式圖案可以是點、線、面等。結構光3D 成像的原理是首先將結構光投射至物體表面,再使用攝像機接收該物體表面反射的結構光圖案,由于接收圖案必會因物體的立體型狀而發生變形,故可以試圖通過該圖案在攝像機上的位置和形變程度來計算物體表面的空間信息。
規則光柵的結構光
PrimeSense 結構光
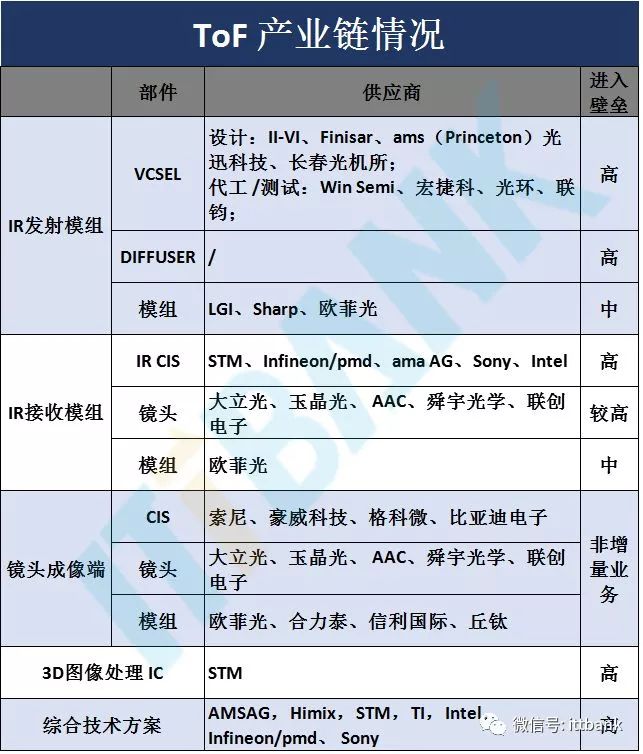
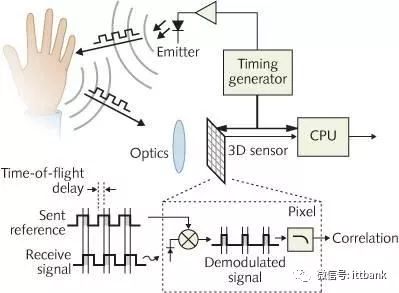
ToF(飛行時間法)
ToF 技術是發射一束經過相位調制的紅外激光到被測物體,當紅外激光被反射回攝像頭,會因為光飛行時間的延遲,導致相位跟發射時的相位有微小的變化,通過計算相位的變化,就可以計算出被測物體到攝像頭之間的距離。
ToF 成像原理
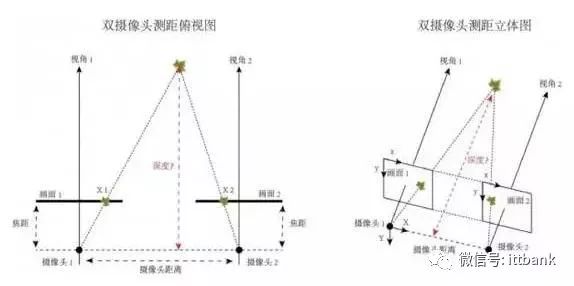
雙目立體視覺
所謂雙目立體成像就是利用兩個攝像頭捕捉的圖像之前的視場角度差,來計算出被測物體到攝像頭的距離,當視場角越大說明距離越近,反之則越遠。
雙目立體視覺技術
雙目立體視覺、結構光和ToF 三種成像技術對比
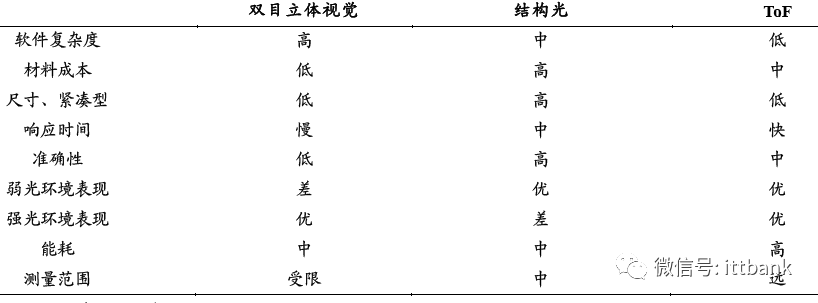
綜合而言,雙目立體視覺在檢測范圍,3D 建模時間,弱光環境性能,功耗,算法復雜度等指標上明顯弱于結構光和ToF,存在明顯缺陷,因此我們判斷未來該技術在手機3D 成像領域前景暗淡。結構光與ToF 各有優劣,都具備商用推廣的基礎。
1) 結構光:適合近距離場景,目前已被手機作為前置3D 成像方案采用。同時結構光產業鏈當前成熟度最高,已具備量產能力,在蘋果的引領下安卓陣營在2018 年也陸續導入。
2) ToF:適合遠距離場景,同時在強光下表現較好,預計將成為手機后置3D 成像主流方案。另外考慮到ToF 相比結構光方案在尺寸和成本上具備優勢,因此預計在前置3D 成像方面也將有所滲透。
-
攝像頭
+關注
關注
60文章
4851瀏覽量
95890 -
光電技術
+關注
關注
0文章
52瀏覽量
12965 -
產業鏈
+關注
關注
3文章
1351瀏覽量
25757
原文標題:趕緊收藏這份超詳細的單攝→雙攝→三攝→3D成像攝像頭產業鏈吧!
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論