") 深度分析自動駕駛汽車的研究現(xiàn)狀
深度分析自動駕駛汽車的研究現(xiàn)狀
自動駕駛載具或?qū)⒁祟惖南乱淮纬鲂蟹绞礁锩覀兡壳坝忠呀?jīng)走到了哪一步?近日,巴西圣埃斯皮里圖聯(lián)邦大學的研究者在 arXiv 上發(fā)布了一篇自動駕駛汽車研究情況總結(jié),并簡單梳理了產(chǎn)業(yè)界的進展。本文摘取了其中的主干部分,更詳細的論述請參閱原文。
我們調(diào)查了有關(guān)自動駕駛汽車的研究文獻,重點關(guān)注的是自 DARPA 挑戰(zhàn)賽以來開發(fā)的配備有可歸類為 SAE 3 級或更高級的自主系統(tǒng)的自動汽車。自動駕駛汽車的自主系統(tǒng)的架構(gòu)通常可分為感知系統(tǒng)和決策系統(tǒng)。感知系統(tǒng)通常分為負責自動駕駛汽車定位、靜態(tài)障礙物地圖測繪、移動障礙物檢測與跟蹤、道路地圖測繪、交通信號檢測與識別等多種任務的許多子系統(tǒng)。決策系統(tǒng)通常也分為許多子系統(tǒng),分別負責路線(route)規(guī)劃、路徑(path)規(guī)劃、行為選擇、運動規(guī)劃、控制等。在本調(diào)查報告中,我們會介紹自動駕駛汽車的自主系統(tǒng)的典型架構(gòu)。我們還會總結(jié)在感知和決策相關(guān)方法方面的研究成果。此外,我們還將詳細描述巴西圣埃斯皮里圖聯(lián)邦大學(UFES)的汽車 IARA 的自主系統(tǒng)的架構(gòu)。最后,我們會列出科技公司開發(fā)的和媒體報道的突出的自動駕駛研究汽車。
1 引言
自動汽車(也被稱為無人駕駛汽車和自動駕駛汽車)自 1980 年代中期以來已經(jīng)得到了全球很多大學、研究中心、汽車公司和其它行業(yè)公司的研究和開發(fā)。過去二十年里重要的自動駕駛研究平臺案例有德國慕尼黑聯(lián)邦國防軍大學的汽車 [DIC87]、Navlab 的移動平臺 [THO91]、慕尼黑聯(lián)邦國防軍大學和戴姆勒-奔馳的汽車 VaMP 和 VITA-2 [GER14]、意大利帕維亞大學和帕爾馬大學的汽車 ARGO [BRO99]、慕尼黑聯(lián)邦國防軍大學的載具 VaMoRs 和 VaMP [GRE00]。
為了促進自動駕駛汽車技術(shù)的發(fā)展,美國國防高級研究計劃局(DARPA)在 2000 年代組織了三次競賽。第一次名為 DARPA Grand 挑戰(zhàn)賽,于 2004 年在美國莫哈維沙漠舉辦,要求無人駕駛的汽車在 10 小時的時間限制內(nèi)跑完一條沙漠通道中的長 142 英里的道路。所有參賽車輛都在前幾英里內(nèi)失敗了。
DARPA Grand 挑戰(zhàn)賽 [BUE07] 在 2005 年再次舉辦,要求機器人車輛跑過一條長 132 英里的路線,其中有平地、干涸湖床和山路,包含 3 個狹窄通道和超過 100 個左右急轉(zhuǎn)彎。這次比賽共有 23 輛決賽者,其中 4 輛車在規(guī)定時間內(nèi)跑完了賽道。斯坦福大學的汽車 Stanley [THR07] 獲得了第一名,卡內(nèi)基·梅隆大學的汽車 Sandstorm 和 H1ghlander 分列第二和第三名。
第三場比賽名為 DARPA Urban 挑戰(zhàn)賽 [BUE09],于 2007 年在美國加州前喬治空軍基地舉辦,要求無人駕駛車輛通過一條長 60 英里的模擬城市環(huán)境的路線,其中也有其它無人駕駛車輛和人類駕駛的汽車,時間限制為 6 小時。這些汽車必須遵守加州的交通規(guī)則。這場比賽有 11 輛決賽者,其中 6 輛在規(guī)定時間內(nèi)跑完了路線。卡內(nèi)基·梅隆大學的汽車 Boss [URM08] 獲得第一,斯坦福大學的汽車 Junior [MON08] 第二,弗吉尼亞理工大學的汽車 Odin [BAC08] 第三。盡管這些比賽中的挑戰(zhàn)遠比人們?nèi)粘=煌ㄖ兴龅降那闆r簡單,但它們已被譽為自動駕駛汽車發(fā)展的里程碑。
自 DARPA 這些挑戰(zhàn)賽以來,又出現(xiàn)了很多自動駕駛汽車競賽和試驗。相關(guān)的案例包括:從 2006 年舉辦至今的歐洲陸地機器人試驗(ELROB)[ELR18]、2009 年到 2013 年舉辦的智能載具未來挑戰(zhàn)賽 [XIN14]、2009 年到 2017 年舉辦的自動化載具競賽 [AUT17]、2010 年的現(xiàn)代自主汽車挑戰(zhàn)賽 [CER11]、2010 年的 VisLab 洲際自主汽車挑戰(zhàn)賽 [BRO12]、2011 年和 2016 年的大型合作駕駛挑戰(zhàn)賽(GCDC)[GCD16]、2013 年的公共道路城市無人駕駛汽車測試 [BRO15]。同時,全世界的學術(shù)界和產(chǎn)業(yè)界都在加速研究無人駕駛汽車。研究機器人汽車的重要大學包括卡內(nèi)基·梅隆大學 [CAR18]、斯坦福大學 [STA18]、麻省理工學院 [MIT17]、弗吉尼亞理工大學 [VIR18] 和 FZI 信息技術(shù)研究中心 [FZI18]。主要公司包括谷歌 [WAY18]、Uber [UBE18]、百度 [APO18]、Lyft [LYF18]、Aptiv [APT18]、特斯拉 [TES18]、英偉達 [NVI18]、Aurora [AUR18]、Zenuity [ZEN18]、戴姆勒和博世 [BOS18]、Argo AI [ARG18]、Renesas Autonomy [REN18]、Almotive [AIM18]、AutoX [AUT18]、Mobileye [MOB18]、Ambarella [AMB18]、Pony.ai [PON18]、京東 [JD18]、Idriverplus [IDR18]、豐田 [TOY18]、福特 [FOR18]、沃爾沃 [VOLV18]、梅賽德斯-奔馳 [MER18]。
盡管大多數(shù)有關(guān)自動駕駛汽車的大學研究都來自美國、歐洲和亞洲,但巴西等國家也有一些相關(guān)研究。巴西的自動駕駛汽車研究平臺相關(guān)案例包括米納斯·吉拉斯聯(lián)邦大學(UFMG)的汽車 CADU [LIM10] [SAB10] [LIM13] [DIA15a]、圣保羅大學的汽車 CARINA [FER14] [MAS14] [SHI16] [HAT17] 和圣埃斯皮里圖聯(lián)邦大學(UFES)的汽車 IARA [MUT16] [CAR17] [GUI16] [GUI17]。IARA 是巴西首輛在城市道路和公路上自動行駛了 74 公里的無人駕駛汽車。
為了衡量自動駕駛汽車的自主水平,SAE International(之前簡稱 SAE,即汽車工程師學會)發(fā)布了一個基于人類駕駛員干預量和人類注意需求量的分類體系,其中自動駕駛汽車的自主程度可劃分為 0 級(汽車的自主系統(tǒng)會發(fā)出警報,也許還能臨時干預,但無法維持對汽車的控制)到 5 級(任何情況下都無需人類干預)[SAE16]。在這篇論文中,我們調(diào)查了發(fā)布在文獻中的自動駕駛汽車研究,重點關(guān)注的是自 DARPA 挑戰(zhàn)賽以來開發(fā)的配備有可歸類為 SAE 3 級或更高級的自主系統(tǒng)的自動汽車 [SAE16]。
自動駕駛汽車的自主系統(tǒng)的架構(gòu)通常可分成兩大類:感知系統(tǒng)和決策系統(tǒng)[PAD16]。感知系統(tǒng)通常分為負責自動駕駛汽車定位、靜態(tài)障礙物地圖測繪、移動障礙物檢測與跟蹤、道路地圖測繪、交通信號檢測與識別等多種任務的許多子系統(tǒng)。決策系統(tǒng)通常也分為許多子系統(tǒng),分別負責路線(route)規(guī)劃、路徑(path)規(guī)劃、行為選擇、運動規(guī)劃、控制等。但是這樣的劃分方式有些模糊,文獻中也還存在一些不同的劃分方式 [PAD16]。
在這項調(diào)查中,我們給出了自動駕駛汽車的自主系統(tǒng)的典型架構(gòu)。我們還總結(jié)了感知和決策相關(guān)方法的研究。
2 自動駕駛汽車架構(gòu)概述
這一節(jié)將概述自動駕駛汽車的自主系統(tǒng)的典型架構(gòu),并將介紹感知系統(tǒng)、決策系統(tǒng)以及它們的子系統(tǒng)所負責的任務。
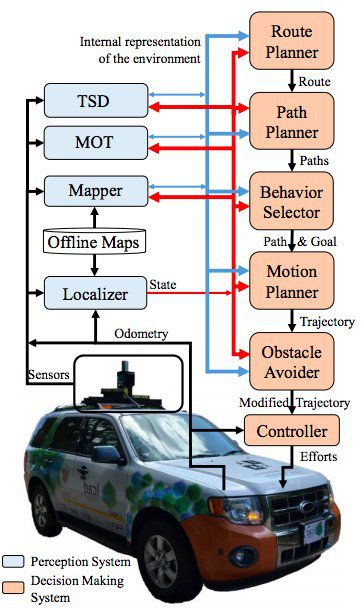
圖 1:典型的多層式的自動駕駛汽車架構(gòu)。TSD 表示交通信號檢測,MOT 表示移動目標跟蹤。
圖 1 展示了自動駕駛汽車的自主系統(tǒng)的典型架構(gòu),其中不同顏色的模塊分別表示感知系統(tǒng)和決策系統(tǒng) [PAD16]。感知系統(tǒng)負責估計汽車的狀態(tài)和創(chuàng)造環(huán)境的內(nèi)部表征(指自動駕駛汽車系統(tǒng)內(nèi)部),這要用到機載傳感器(比如光探測和測距(LIDAR)、無線電探測和測距(RADAR)、相機、全球定位系統(tǒng)(GPS)、慣性測量單元(IMU)、里程表等)收集的數(shù)據(jù)和有關(guān)傳感器模型、道路網(wǎng)、交通規(guī)則、車輛動態(tài)等的先驗信息。決策系統(tǒng)負責將車輛從初始位置駕駛到用戶定義的終點,這需要考慮汽車的狀態(tài)和環(huán)境的內(nèi)部表征,還要考慮交通規(guī)則和乘客舒適度等情況。
為了在環(huán)境中駕駛汽車,決策系統(tǒng)需要知曉汽車所在的位置。定位器(Localizer)模塊負責估計與環(huán)境的靜態(tài)地圖相關(guān)的汽車狀態(tài)(姿態(tài)、線速度、角速度等)。這些靜態(tài)地圖(即圖 1 中的 Offline Maps)會在自動操作前自動計算得到,通常會使用自動駕駛汽車自身的傳感器,但通常也需要人工標注(比如人行橫道或交通燈的位置)或編輯(比如移除傳感器捕獲的非靜態(tài)目標)。自動駕駛汽車可能使用一個或多個不同的離線地圖來進行定位,比如占用情況網(wǎng)格地圖、緩解地圖或地標地圖。我們將在第 3.B 節(jié)介紹用于生成這些地圖的方法的相關(guān)文獻。
定位器模塊的輸入包括離線地圖、傳感器數(shù)據(jù)和平臺的里程數(shù)據(jù),生成的輸出是自動駕駛汽車的狀態(tài)(圖 1)。需要重點指出,盡管 GPS 也許有助于定位過程,但由于高大樹木、建筑、隧道等造成的干擾會使得 GPS 定位不可靠,在城市環(huán)境中只使用 GPS 是不足以合適定位的。我們將在第 3.A 節(jié)介紹有關(guān)定位技術(shù)的文獻。
地圖測繪器(Mapper)模塊以離線地圖和車輛狀態(tài)為輸入,生成在線地圖。這個在線地圖通常是離線地圖與使用傳感器數(shù)據(jù)和汽車當前狀態(tài)在線計算出的占用情況網(wǎng)格地圖中的信息的融合。我們將在第 3.B 節(jié)介紹計算在線地圖的方法的相關(guān)文獻。可以預期這個在線地圖僅包含環(huán)境的靜態(tài)表征,因為這可能有助于決策系統(tǒng)的某些模塊的運作。為了實現(xiàn)檢測以及移除在線地圖中的移動目標,通常會使用一個移動目標跟蹤(Moving Objects Tracking/MOT)模塊(圖 1)。第 3.D 節(jié)介紹的文獻的主題即為自動駕駛汽車的移動目標檢測和跟蹤方法。
自動駕駛汽車要必須能識別和遵守水平(車道線)和垂直(即限速標志、交通信號燈等)的交通信號。交通信號檢測(Traffic Signalization Detection/TSD)模塊負責交通信號的檢測和識別。我們將在第 3.E 節(jié)介紹交通信號檢測和識別方法相關(guān)文獻。
給定用戶在離線地圖中定義的終點(Final Goal),路線規(guī)劃器(Route Planner)會在離線地圖中計算出一條從當前狀態(tài)到達終點的路線。路線(route)是指一系列路徑點的序列,其中每個點都是離線地圖中的一對坐標。我們將在第 4.A 介紹路線規(guī)劃方法的文獻。
給定一條路線,路徑規(guī)劃器(Path Planner)模塊會根據(jù)汽車狀態(tài)和環(huán)境的內(nèi)部表征以及交通規(guī)則計算一組路徑。路徑(path)是指一系列姿態(tài)(pose)的序列,其中每個姿態(tài)都是離線地圖中的一個坐標對和汽車在該坐標對定義的位置所需的方位。中間的路徑 P_c 是路線盡可能最好的路徑,其左側(cè)的路徑和右側(cè)的路徑都是與 P_c 起始姿態(tài)相同的路徑,向左或向右的路徑具有不同的激進程度。我們將在第 5.B.1 節(jié)介紹有關(guān)路徑規(guī)劃方法的文獻。
行為選取器(Behavior Selector)模塊負責選擇當前的駕駛行為,比如車道保持、交叉路口處理、交通燈處理等。其做法是選擇一條路徑,當前狀態(tài)之前幾秒(大約 5 秒)的一個姿態(tài)——決策范圍,和在該姿態(tài)所需的速度。姿勢和相關(guān)聯(lián)的速度的配對被稱為目標(Goal)。行為選取器選擇目標時會在決策時間范圍內(nèi)考慮當前的駕駛行為以及避免與環(huán)境中的靜止和移動障礙物相撞。
運動規(guī)劃器(Motion Planner)模塊負責計算一個從汽車的當前狀態(tài)到當前目標的軌跡,這個軌跡遵循行為選取器定義的路徑,滿足汽車的運動學和動力學約束條件,并能保證乘客舒適。軌跡 T 是一個指令序列 c_k = (v_k, φ_k, t_k),其中 v_k 是在時間 t 的所需速度,φ_k 是在時間 t 的所需轉(zhuǎn)向角度,t_k 是 c_k 的持續(xù)時間。一個軌跡能讓汽車平滑且安全地從當前狀態(tài)到達目標。我們將在第 4.B.2 節(jié)介紹有關(guān)運動規(guī)劃的方法的文獻。
避障器(Obstacle Avoider)模塊接收運動規(guī)劃器計算出的軌跡,并在有必要時對其進行修改(通常是降低速度)以避開障礙物。有關(guān)執(zhí)行避障功能的方法的文獻不多。我們將在第 4.B 看到一些相關(guān)文獻。
最后,控制器(Controller)模塊根據(jù)被避障器修改后的運動規(guī)劃器軌跡計算并發(fā)送工作指令,以控制方向盤、油門和剎車的執(zhí)行器,使車輛能以物理世界允許的方式盡可能好地執(zhí)行修改后的軌跡。我們將在第 4.C 節(jié)介紹低級汽車控制方法的相關(guān)文獻。
下面我們將按感知系統(tǒng)和決策系統(tǒng)兩大組別詳細介紹各個模塊和用于實現(xiàn)它們的技術(shù)及變體技術(shù)。
3 感知
在這一節(jié),我們將介紹文獻中為自動駕駛汽車的感知系統(tǒng)提出的重要方法,包括定位器(或定位)、離線障礙物地圖測繪、道路地圖測繪、移動障礙物跟蹤、交通信號檢測與識別。
A 定位
定位模塊負責估計自動駕駛汽車相對于地圖或道路(比如表示成路沿或其它道路標記)的姿態(tài)(位置和方向)。大多數(shù)通用的定位子系統(tǒng)都基于 GPS。但是,總的來說,這些系統(tǒng)不能用于城市中的自動駕駛汽車,因為在有遮擋的區(qū)域不能確保有 GPS 信號,比如樹下、城市峽谷(大型建筑之間的區(qū)域)、隧道。
文獻中已經(jīng)提出了多種不依賴 GPS 的定位方法。它們主要可分為三類:基于 LIDAR 的方法、基于 LIDAR 加相機的方法、基于相機的方法。基于 LIDAR 的定位方法僅依靠 LIDAR 傳感器,這種方法測量準確且易于處理。但是,盡管 LIDAR 行業(yè)確實在努力降低生產(chǎn)成本,但與相機相比仍然價格高昂。在典型的基于 LIDAR 加相機的定位方法中,LIDAR 數(shù)據(jù)僅被用于構(gòu)建地圖,估計自動駕駛汽車相對于地圖的位置則會使用相機數(shù)據(jù),這能夠降低成本。基于相機的定位方法很便宜廉價,但通常沒那么精確可靠。
1) 基于 LIDAR 的定位
2) 基于 LIDAR 加相機的定位
3) 基于相機的定位
B 離線障礙物地圖測繪
離線障礙物地圖測繪子系統(tǒng)負責計算自動駕駛汽車所在環(huán)境中的障礙物地圖。這個子系統(tǒng)是基礎系統(tǒng),讓自動車輛有能力安全地駛過公共道路而不與障礙物(比如標牌、路沿)發(fā)生碰轉(zhuǎn)。障礙物地圖包含汽車也許可以駛過或不能駛過的位置的信息,并區(qū)分了自由區(qū)域(可通行)與已占用區(qū)域。汽車必須一直處于自由區(qū)域內(nèi)。障礙物地圖是根據(jù)地圖測繪階段的傳感器數(shù)據(jù)構(gòu)建的,并會被存儲起來以待自動操作階段使用。
狀態(tài)空間的表征形式通常可分為拓撲表征[CUM08] [MIL12] [FORE18] 和度量表征[HOR13] [MUT16] [SCH18]。拓撲表征是將狀態(tài)建模為圖(graph),其中節(jié)點代表重要的位置(或特征),邊表示它們之間的拓撲關(guān)系(比如位置、方向、接近程度和連通性)。這些分解的分辨率取決于環(huán)境的結(jié)構(gòu)。度量表征通常是將狀態(tài)空間分解成規(guī)則間隔的單元。這種分解形式并不取決于特征的位置和形狀。度量表征的空間分辨率往往高于拓撲表征的。其易變性和高效性使其成為了最常用的空間表征。要了解用于創(chuàng)建拓撲表征的主要的基于視覺的方法,讀者可參閱 Garcia-Fidalgo and Ortiz [FID15]。這里我們總結(jié)了用于計算度量表征的最重要方法,這些方法又可進一步分為離散和連續(xù)空間表征。
1) 離散空間度量表征
2) 連續(xù)空間度量表征
C 道路地圖測繪
道路測繪子系統(tǒng)負責收集自動駕駛汽車周圍的道路和車道信息,并使用幾何和拓撲屬性將它們表示在地圖中,包括互連的區(qū)域和受限區(qū)域。道路地圖測繪子系統(tǒng)的主要主題是地圖表征和地圖創(chuàng)建。
1) 道路地圖表征
圖 4:無人駕駛汽車 IARA 使用的道路網(wǎng)格地圖和 RDDF 路徑。綠色和紅色區(qū)域表示道路網(wǎng)格地圖,黑點是 RDDF 路徑點,這是從道路網(wǎng)格地圖中自動提取出來的。
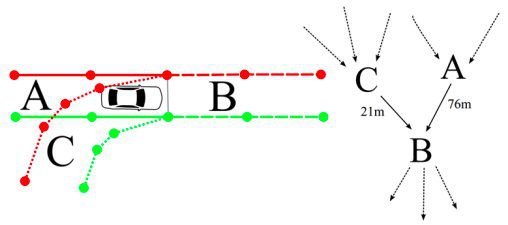
圖 5:自動車輛項目 [BEN14] 使用的 lanelet(車道片段)地圖的圖模型。紅色和綠色點分別表示車道片段 A、B、C 的左和右路沿。該圖展示了 A 和 C 交匯成 B 的情況
2) 道路地圖創(chuàng)建
D 移動目標跟蹤
移動目標跟蹤(MOT)子系統(tǒng)(也被稱為檢測與跟蹤多目標/DATMO)負責檢測和跟蹤自動駕駛汽車所處環(huán)境中的移動障礙物的姿態(tài)。這個子系統(tǒng)對自動車輛的決策而言至關(guān)重要,能幫汽車避免與可能移動的物體(比如其它汽車和行人)發(fā)生碰撞。移動障礙物隨時間的位置變化通常是根據(jù)測距傳感器(比如 LIDAR 和 RADAR)或立體相機捕獲的數(shù)據(jù)估計的。來自單目相機的圖像能提供豐富的外觀信息,這可用于改善對移動障礙物的假設。為了應對傳感器測量的不確定性,可將貝葉斯濾波器(比如卡爾曼或粒子濾波器)用于狀態(tài)預測。文獻中已提出了多種用于 MOT 的方法。這里我們將給出近十年最新發(fā)表的相關(guān)文獻。更早期的研究可參閱 Petrovskaya et al. [PET12]、Bernini et al. [BER14] 和 Gir?o et al. [GIR16]。
用于 MOT 的方法主要可分為六類:
1)基于傳統(tǒng)方法的 MOT
2)基于模型的 MOT
3)基于立體視覺的 MOT
4)基于網(wǎng)格地圖的 MOT
5)基于傳感器融合的 MOT
6)基于深度學習的 MOT
E 交通信號檢測與識別
交通信號檢測與識別子系統(tǒng)負責檢測和識別交通規(guī)則定義的信號,使汽車可以遵守交通法規(guī)做出正確的決策。與交通信號相關(guān)的任務有很多,本文將介紹這三大主要主題:
1) 交通信號燈檢測與識別
2) 交通標志檢測與識別
3) 路面標記檢測與識別
4 決策
在這一節(jié),我們將給出自動駕駛汽車決策系統(tǒng)文獻中報告的相關(guān)技術(shù),包含路線規(guī)劃、行為選取、運動規(guī)劃和控制子系統(tǒng)。
A 路線規(guī)劃
路線規(guī)劃子系統(tǒng)負責計算出一條穿過道路網(wǎng)的路線,讓自動駕駛汽車能從起始位置到達用戶操作者定義的終點位置。如果將道路網(wǎng)表示為一個加權(quán)的有向圖,其邊權(quán)重表示遍歷一個道路片段的成本,則計算路線的問題就可約簡為在一個加權(quán)有向圖中尋找最短路徑的問題。但是,對于大型道路網(wǎng),經(jīng)典最短路徑算法(比如 Dijkstra [DIJ59] 和 A* [HAR68])的復雜性時間是不實用的。
用于道路網(wǎng)中路線規(guī)劃的方法能在查詢時間、預處理時間、空間用量、對輸入變化的穩(wěn)健性等方面提供不同的權(quán)衡。這些方法主要可分為四類 [BAS15]:目標導向的方法、基于分割因子的方法、分層方法、bounded-hop 方法;也可以組合這些方法。
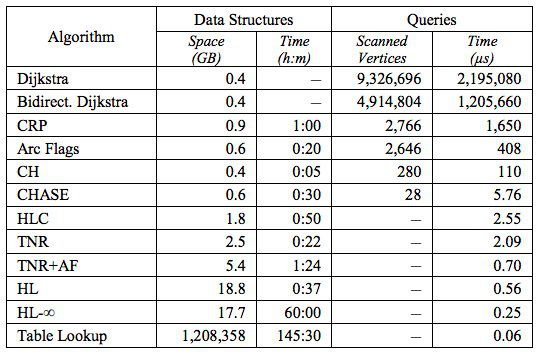
表 1:西歐的路線規(guī)劃技術(shù)的表現(xiàn) [BAS15]
B 運動規(guī)劃
運動規(guī)劃子系統(tǒng)負責計算一條路徑或軌跡,使自動駕駛汽車能從當前狀態(tài)到達行為選取子系統(tǒng)定義的下一個局部目標狀態(tài)。運動規(guī)劃執(zhí)行的是局部駕駛行為,滿足汽車的運動學和動力學限制,保證乘客舒適,以及避免與環(huán)境中的靜止和移動障礙物碰撞。
運動規(guī)劃可以是路徑或軌跡。路徑是一個汽車狀態(tài)序列,不是定義汽車狀態(tài)隨時間變化的方式。這個任務可以委托給其它子系統(tǒng)(比如行為選取子系統(tǒng)),或者可將速度分布定義為曲率以及與障礙物的接近程度的函數(shù)。軌跡是指定了汽車狀態(tài)隨時間的演變情況的路徑。
文獻中提出了多種用于運動規(guī)劃的方法。我們將介紹為路上運動規(guī)劃設計的且使用真實自動車輛實驗評估過的方法。讀者可參閱 González et al. [GON16] 和 Paden et al. [PAD16] 了解對這些方法的更全面的總結(jié)。
1) 路徑規(guī)劃
2) 軌跡規(guī)劃
C 控制
在自動駕駛汽車領(lǐng)域,控制是指工程開發(fā)領(lǐng)域的自動控制背后的理論,這涵蓋了沒有連續(xù)直接人類干預的操作和調(diào)節(jié)過程的機制的應用。在最簡單的自動控制形式中,控制子系統(tǒng)會比較該過程的輸出與預期輸入,并使用其中的誤差(該過程的輸出與預期輸入的差異)來修改該過程的輸入,使得該過程即使在存在擾動時也能保持在設定點。在自動車輛中,通常會將自動控制理論應用于路徑跟蹤和硬件驅(qū)動方法。路徑跟蹤方法的作用是在汽車模型等地方存在不準確的情況時穩(wěn)定運動規(guī)劃的執(zhí)行。硬件驅(qū)動控制的作用是在汽車模型等地方存在不準確的情況時計算執(zhí)行運動規(guī)劃的轉(zhuǎn)向角度、油門和剎車制動器輸入。
路徑跟蹤方法也被稱為控制技術(shù),因為其使用了自動控制理論,并將路徑視為所要控制的信號。但是,在自動駕駛領(lǐng)域?qū)⑵浞Q為路徑跟蹤方法更合適,以便將它們與硬件驅(qū)動方法分開。
1) 路徑跟蹤方法
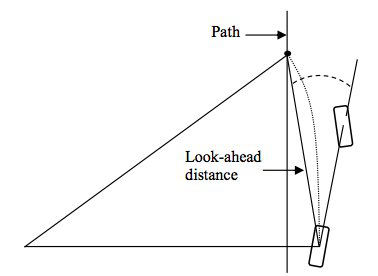
圖 6:Pure Pursuit 方法的幾何描述
2)硬件驅(qū)動控制方法
5 UFES 汽車 IARA 的架構(gòu)
我們將在這一節(jié)詳細描述 UFES 的汽車 IARA 的自主系統(tǒng)的架構(gòu)。
圖 7:智能和自動機器人汽車(IARA)是巴西首輛在城市道路和公路上行駛了 74 公里的自動駕駛汽車。這里有一段 IARA 自動運行的視頻:https://youtu.be/iyKZV0ICysc
6 產(chǎn)業(yè)界開發(fā)的自動駕駛汽車
我們將在這一節(jié)列出科技公司研發(fā)的和媒體報道的突出的自動駕駛汽車研究。
有很多公司展現(xiàn)了研發(fā)自動駕駛汽車和/或投資相關(guān)技術(shù)的興趣,以期從中獲利。相關(guān)企業(yè)既有汽車制造商與生產(chǎn)傳感和計算硬件的公司,也有開發(fā)輔助駕駛和自動駕駛、娛樂和車載廣告公司軟件的公司。
所涉及的公司包括 Torc、谷歌、百度、Uber、Lyft、Aptiv、滴滴、特斯拉、樂視、英偉達、Aurora、Zenuity、戴姆勒、博世、Argo AI、Renesas Autonomy、本田、Visteon、AImotive、AutoX、Mobileye、Ambarella、Pony.ai、Navya、Transdev、京東、豐田、福特、沃爾沃和梅賽德斯-奔馳。
-
自動駕駛
+關(guān)注
關(guān)注
784文章
13786瀏覽量
166404 -
自動駕駛汽車
+關(guān)注
關(guān)注
4文章
376瀏覽量
40829
原文標題:自動駕駛之路已走了多遠?一文讀懂研究現(xiàn)狀
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
端到端自動駕駛技術(shù)研究與分析
MEMS技術(shù)在自動駕駛汽車中的應用
自動駕駛汽車安全嗎?

人工智能的應用領(lǐng)域有自動駕駛嗎







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論