


摘要:根據(jù)中國智能交通產(chǎn)業(yè)聯(lián)盟(C-ITS)發(fā)布的《合作式智能運輸系統(tǒng)車用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)》[1],深入研究了車與車協(xié)同駕駛主動安全相關(guān)的緊急制動預(yù)警(EBW)的應(yīng)用場景[2],結(jié)合北京汽車車廠自身特點及人因工程特征提出了把剎車信號分為剎車預(yù)警信號、常規(guī)剎車信號和緊急剎車信號三種,并給出了通過采集制動踏板行程距離獲取包含剎車加速度的剎車信號。通過專用短程通信(DSRC)技術(shù),分等級剎車預(yù)警信號的提示,可以縮短人車系統(tǒng)在剎車過程中司機對緊急剎車的反應(yīng)時間,不但能達安全剎車,有效防止追尾,而且還能通過剎車信號確定合理的最大制動力,減輕對車輛本身的耗損,同時也能達到節(jié)能降耗的目的。同時,提出了包含制踏板行程標(biāo)準(zhǔn)化距離的剎車板制造標(biāo)準(zhǔn),并對 C-ITS 的《合作式智能運輸系統(tǒng)車用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)》及《專用短程通信消息集字典》SAE J2735[3]中的數(shù)據(jù)集定義進行了擴展建議,就車廠企業(yè)標(biāo)準(zhǔn)進行了說明。本文基于專用短程通信(DSRC)技術(shù),采用理論分析和試驗驗證結(jié)合的研究方法,對車車協(xié)同、人車協(xié)同駕駛相關(guān)的安全問題進行研究。
1.前言
針對防止行駛車輛常見的追尾事故的駕駛主動安全設(shè)計上,主要采用緊急剎車輔助(EBA)方案。以 EBA 為代表的剎車系統(tǒng),都是以立刻激發(fā)最大剎車壓力,以達到最高的剎車效果,達到理想的制動效果,以制止交通事故的發(fā)生為目的而開發(fā)出來的。在一些非常緊急的事件中,該系統(tǒng)利用傳感器感應(yīng)駕駛者對制動踏板踩踏的力度與速度大小,然后通過電腦判斷駕駛者此次剎車意圖。如果屬于非常緊急的制動,EBA 會指示制動系統(tǒng)產(chǎn)生更高的油壓使 ABS 發(fā)揮作用,從而使制動力快速產(chǎn)生,減少制動距離。而對于正常情況剎車,EBA 則會通過判斷不予啟動 ABS。
通常情況下,EBA 的響應(yīng)速度都會遠遠快于駕駛者,這對縮短剎車距離,增強安全性非常有利。當(dāng)駕駛?cè)嗽诰o急情況下迅速踩制動踏板而踩制動踏板的力矩不足時,EBA系統(tǒng)便會在短時間內(nèi)把制動力增至最大。其速度要比大多數(shù)駕駛?cè)艘苿幽_的速度快得多,在制動踏板剛踩下部分行程時就可以有效停車,提前達到制動的最大力矩,縮短緊急制動情況下的制動距離。由于更早地施加了最大的制動力,EBA 系統(tǒng)可提前制動,顯著縮短制動距離,并有效防止在停停走走的交通路況中發(fā)生追尾事故。
EBA 系統(tǒng)主要是從駕駛員剎車執(zhí)行的角度出發(fā),以立刻激發(fā)最大剎車壓力,以制止交通事故的發(fā)生為目的而開發(fā)出來的。EBA 方案是從改進制動踏板的制動效率為出發(fā)點,以如何盡可能有效縮短制動距離為問題解決的突破口,而沒有考慮到防止車輛尾是人與車協(xié)作、車與車協(xié)作的系統(tǒng)問題。改進制動踏板的制動機制是一個方面,而從人因工程的層面來看,人的因素考慮是防止追尾的另外一個突破口。
從人機系統(tǒng)角度分析,剎車過程應(yīng)包括駕駛員反應(yīng)時間和制動系統(tǒng)反應(yīng)時間。駕駛員反應(yīng)時間是前車尾燈亮燈開始到自車剎車的腳踏板動作開始之間的時間。制動系統(tǒng)反應(yīng)時間是剎車的腳踏板動作開始到到達自車平均最大減速度之間的時間。根據(jù)汽車駕駛行業(yè)統(tǒng)計數(shù)據(jù),駕駛員反應(yīng)時間一般為 0.8S 到 2.0S,而制動系統(tǒng)反應(yīng)時間一般為 0.7S。從以上經(jīng)驗數(shù)據(jù)分析來看,整體制動效果影響因子中,駕駛員反應(yīng)時間能占到制動效果的 51%到 74%,從而駕駛員反應(yīng)時間也是有效防止車輛追尾的重要因素,而這一因素通常被忽略。另一個方面,提高有效剎車次數(shù)和降低駕駛員的緊張感和疲勞感,也是設(shè)計制動系統(tǒng)中必須考慮的因素。通過利用專用短距離通信技術(shù)(DSRC),研究車車、車人協(xié)作,以提高駕駛員應(yīng)急反應(yīng)時間,減少無效的剎車預(yù)警信息,提高剎車的有效性,以達到合理地保持車距和確定合理的最大制動力的目的,同時提高駕駛員駕駛的舒適感。
2.場景分析
數(shù)據(jù)更新頻率、系統(tǒng)延遲參照 J2945[4]及 NHTSA VSC-A[5]性能指標(biāo)說明。圖 1 分析了包含人因工程的緊急剎車過程,根據(jù)汽車制動動力學(xué)可以推導(dǎo)出最小安全距離模型如下[6]:

Vs、Vf分別為 HV 及 RV 車速,T 為駕駛員反應(yīng)時間, 前車尾燈亮燈開始到自車剎車腳踏板動作開始的時間; t1為制動協(xié)調(diào)時間,剎車的腳踏板動作開始到到達自車開始減速的時間;t2為減速度增長時間,從開始制動到達平均最大減速度的時間;d 為停止后車輛間距,車輛停止以后,自車和前車之間的距離。為了有效防止行車追尾事故的發(fā)生,達到合理地保持車距的目的,需要解決在剎車過程中,縮短駕駛員反應(yīng)時間 T,確定合理的最大制動力。
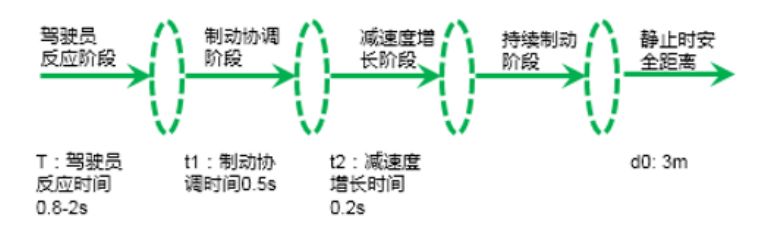
圖 1 包含人因的制動過程
如圖2主車(HV)和遠車(RV)位置關(guān)系,需分析接收到的遠車(RV)剎車制動消息,通過行駛方向、速度、加速度、位置篩選出存在潛在危險的遠車制動信息,并做剎車事件提提醒。
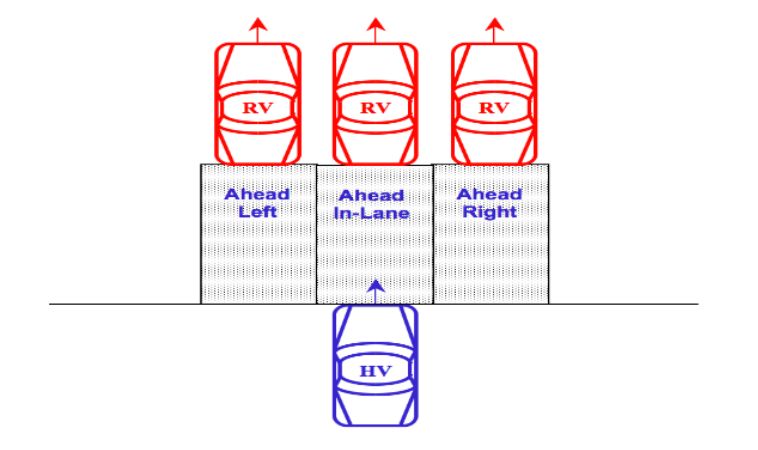
圖 2 車輛位置關(guān)系與威脅車輛篩查
3.設(shè)計方案
3.1 系統(tǒng)構(gòu)成
系統(tǒng)分為通信底層和 V2X 應(yīng)用層兩大部分。通信底層用于實現(xiàn) V2X 通信相關(guān)底層軟件接口與驅(qū)動的封裝。V2X 應(yīng)用層是基于通信底層的開發(fā)接口進行相關(guān)通信數(shù)據(jù)處理和 V2X 應(yīng)用功能的實現(xiàn)部分。通信底層包括兩大部分,通信接口層和 Linux Kernel 及驅(qū)動。基于 Linux 操作系統(tǒng),增加 V2X 設(shè)備通信相關(guān)的硬件芯片驅(qū)動模塊,實現(xiàn)了基于 Linux 操作系統(tǒng)級別上的軟件開發(fā)的基礎(chǔ)接口模塊層,這部分是通信基礎(chǔ)核心部分。通信接口層封裝了三部分接口,V2X 通信接口、GPS 通信接口、CAN 總線數(shù)據(jù)接口。V2X 通信接口采用包括數(shù)據(jù)接入層、網(wǎng)絡(luò)層、數(shù)據(jù)封裝層,通過這三層實現(xiàn)數(shù)據(jù)封裝,網(wǎng)絡(luò)傳輸、數(shù)據(jù)接入到應(yīng)用訪問接口的處理過程。這三層統(tǒng)一封裝為 V2X 通信接口,使得開發(fā)人員直接調(diào)用接口就可以實現(xiàn) V2X 數(shù)據(jù)通信。CAN 總線數(shù)據(jù)接口從總線上讀取車輛相關(guān)數(shù)據(jù),如車輛轉(zhuǎn)向、緊急制動、燈光等數(shù)據(jù),將這些數(shù)據(jù)上傳到 V2X 應(yīng)用層供其使用。
V2X 應(yīng)用層包括任務(wù)管理、應(yīng)用層、信息安全三部分。任務(wù)管理來實現(xiàn)總體軟件資源的調(diào)配管理和信息節(jié)制,信息安全主要負責(zé)數(shù)據(jù)信息的加密解密和傳遞過程中的安全加密和保護,應(yīng)用層包括協(xié)議解析、業(yè)務(wù)調(diào)度和 V2X 業(yè)務(wù)功能、實現(xiàn)通知模塊、V2X HMI 交互界面。協(xié)議解析分為 CAN 解析、通信協(xié)議解析。CAN 解析從 CAN 總線接口讀數(shù)據(jù)轉(zhuǎn)換成 V2X 業(yè)務(wù)需要的數(shù)據(jù),如轉(zhuǎn)向值、緊急制動、燈光值等,通信協(xié)議解析用于解析其他 X 設(shè)備(車、人、基礎(chǔ)設(shè)施)發(fā)來數(shù)據(jù),同時提供逆向操作過程,即向 X設(shè)備(車、人、基礎(chǔ)設(shè)施)發(fā)出數(shù)據(jù),該模塊實現(xiàn)協(xié)議數(shù)據(jù)的解析、數(shù)據(jù)加密/解密、數(shù)據(jù)壓縮/解壓縮。
3.2 處理流程
根據(jù)圖 3 系統(tǒng)處理模塊框圖,系統(tǒng)處理過程描述如下。
1)分析接收到的遠車(RV)剎車制動消息,通過 RV 車輛的行駛方向、速度、加速度、位置信息,在 TC 模塊篩選出位于 Ahead in-lane,Ahead left 及 Ahead Right 區(qū)域的遠車(RV)。
2)進一步篩選處于一定距離范圍內(nèi)的遠車(RV)作為潛在威脅車輛。
3)TA 模塊計算每一個潛在威脅車輛碰撞時間(TTC:time-to-collision)或防撞距離(collision avoidance range),篩選出與主車(HV)存在碰撞危險的威脅車輛,進行不同危險等級預(yù)警。
4)若有多個威脅車輛,則篩選出最緊急的威脅車輛。
5)系統(tǒng)通過 HMI 對主車(HV)駕駛員進行相應(yīng)的碰撞預(yù)警。
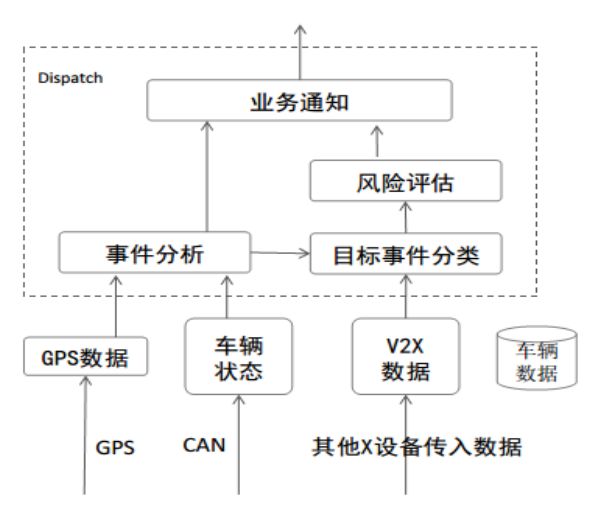
圖 3 系統(tǒng)處理模塊
4.交互數(shù)據(jù)設(shè)計
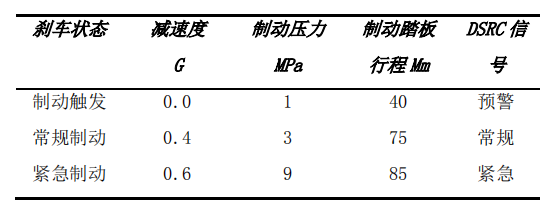
車輛在行駛中正常制動情況下,車輛減速度為 0.3G~0.4G,相對應(yīng)的制動系統(tǒng)油壓大約為 3.5~4Mpa。在制動系統(tǒng)踏板行程的分析與設(shè)計中,制動踏板的行程可以分為制動觸發(fā)、常規(guī)制動及緊急制動三中情況,即制動系統(tǒng)壓力分別在 1MPa、3~4MPa和 10~12MPa 狀態(tài)下所對應(yīng)的三種制動踏板的行程。為此,如表 3 的說明,定義了剎車預(yù)警信號、常規(guī)剎車信號和緊急剎車信號三種剎車信號。剎車預(yù)警信號反映制動觸發(fā)前的司機準(zhǔn)備狀態(tài),相應(yīng)的制動剎車板的行程為 10mm~40mm;常規(guī)剎車信號反映制 動 觸 發(fā) 后 到 最 大 0.6G 減 速 度 的 常 規(guī) 制 動 狀 態(tài) , 其 制 動 剎 車 板 的 行 程 為40mm~85mm;緊急剎車信號反映 0.6G 減速度以上的緊急制動狀態(tài),其制動剎車板的行程為 85mm 以上。在定義三種剎車信號的基礎(chǔ)上,可以把前車的包含剎車預(yù)警的剎車狀態(tài)通知給后面車輛。
4.1 數(shù)據(jù)集定義
數(shù)據(jù)幀是應(yīng)用層數(shù)據(jù)包收發(fā)的基本單位。不同類別的消息用以下統(tǒng)一的結(jié)構(gòu)打成數(shù)據(jù)幀進行發(fā)送和接收。一個數(shù)據(jù)幀由一個消息類型 ID 和消息體組
成。
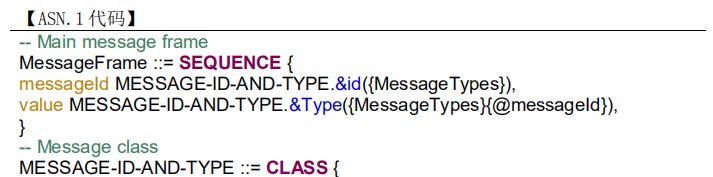
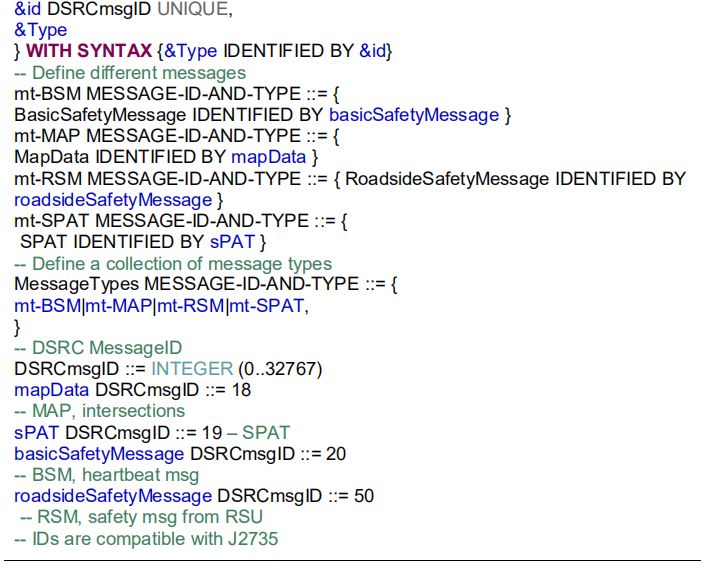
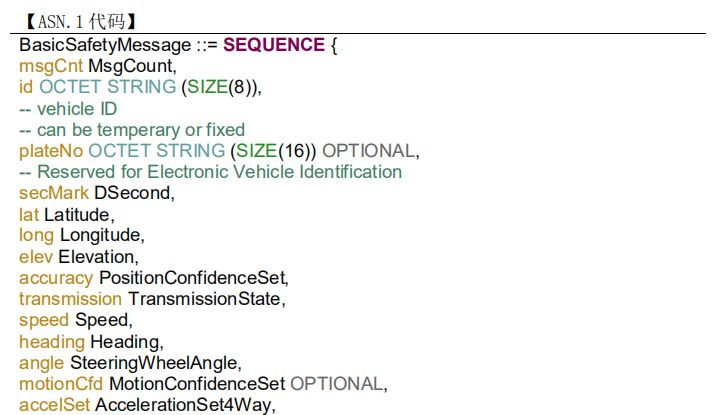
消息體打包了各類具體的消息內(nèi)容。目前,J2735 標(biāo)準(zhǔn)[3]定義了 4 個最基本的消息體。車輛基本安全消息是使用最廣泛的一個應(yīng)用層消息,用來在車輛之間交換安全狀態(tài)數(shù)據(jù)。該消息一般會周期性地進行廣播,將自身的狀態(tài)信息告知周圍車輛,支持一系列協(xié)同安全應(yīng)用。廣播頻率一般為 10Hz。
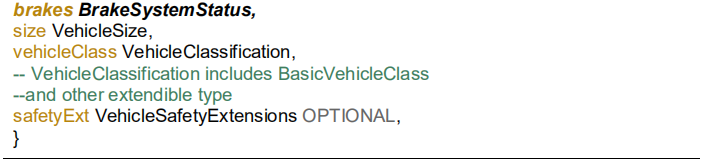
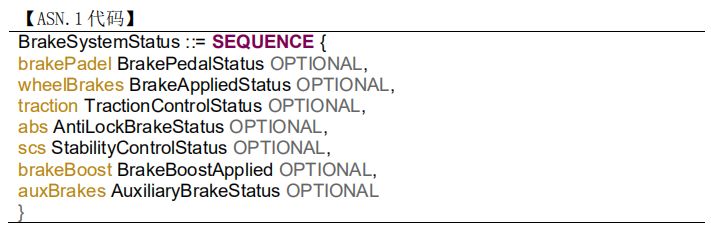
其中,DE_BrakeSystemStatus 定義車輛的剎車系統(tǒng)狀態(tài),包括了 7 種不同類型的狀態(tài)。
brakePadel:剎車踏板踩下情況。
wheelBrakes:車輛車輪制動情況。
traction:牽引力控制系統(tǒng)作用情況。
abs:制動防抱死系統(tǒng)作用情況。
scs:車身穩(wěn)定控制系統(tǒng)作用情況。
brakeBoost:剎車助力系統(tǒng)作用情況。
auxBrakes:輔助制動系統(tǒng)(一般指手剎)情況。
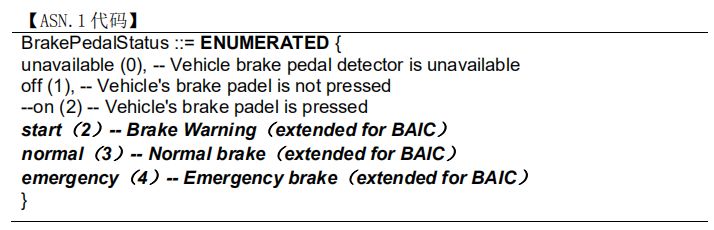
4.2 剎車狀態(tài)數(shù)據(jù)擴展
C-ITS 的《合作式智能運輸系統(tǒng)車用通信系統(tǒng)應(yīng)用層及應(yīng)用數(shù)據(jù)交互標(biāo)準(zhǔn)》[1]中定義的剎車踏板狀態(tài) DT_BrakePedalStatus,只是反映剎車板是否被踩下的兩種狀態(tài)。在試驗的基礎(chǔ)上把剎車板是否被踩下擴展為制動觸發(fā)信號、常規(guī)制動信號和緊急緊急信號三種。三種信號在最小工況下(荷載:空載;車速:50km/h)的定義如表 3說明。
表 3 剎車信號定義
5.模擬實驗
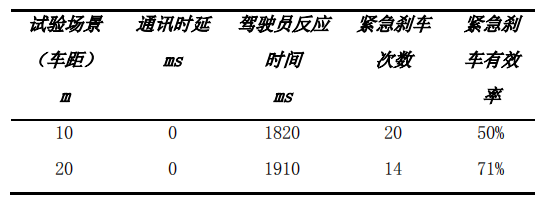
通過駕駛模擬平臺,在停停走走的路況條件下,對駕駛員反應(yīng)速度和有效剎車次數(shù)這兩個關(guān)鍵指標(biāo)進行驗證。試驗場景為前后兩車,車速 60km/h,分別觀察后車和前車車距 20m 和 10m 兩種條件下,前車常規(guī)剎車和緊急剎車的駕駛行為對后車駕駛員的影響。試驗設(shè)計行駛 30 公里路程,隨機產(chǎn)生 10 次常規(guī)剎車信號和 10 次緊急剎車信號和相應(yīng)的 20 次剎車預(yù)警信號。并設(shè)定 DSRC 系統(tǒng)的車輛基本安全消息幀發(fā)送頻率為 10Hz。在沒有剎車預(yù)警信號的條件下,試驗數(shù)據(jù)如表 4 所示。
表 4 無行為預(yù)判的反應(yīng)時間和緊急剎車有效性
在有剎車預(yù)警信號傳達的條件下,試驗數(shù)據(jù)如表 5 所示。
表 5 行為預(yù)判下的反應(yīng)時間和緊急剎車有效性
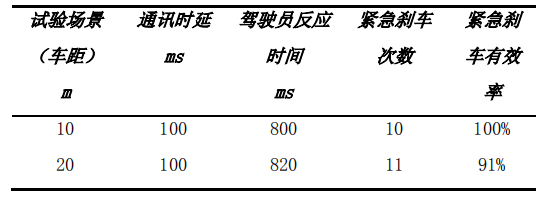
以上試驗數(shù)據(jù)表明,剎車預(yù)警方法可以把駕駛員反應(yīng)時間從 1.9 秒縮減到 0.秒,而其中需要花銷 0.1 秒的 DSRC 通信時延成本。同時,剎車預(yù)警方法在近距離跟馳駕駛場景下能明顯提升緊急剎車的有效性。
6.結(jié) 論
通過 DSRC 短程通信技術(shù),進行剎車預(yù)警信號超視距后車傳達,可以明顯縮短人機剎車系統(tǒng)在剎車過程中駕駛員對緊急剎車的反應(yīng)時間和提高剎車有效率。而且在視障的場景下,不但能達到安全剎車,有效防止追尾,而且通過常規(guī)剎車信號的分級,還可以合理確定最大制動力,減輕對車輛本身的耗損,同時能達到節(jié)能降耗的目的。值得說明的是,車與車間通信不限于 DSRC 技術(shù),未來的 LTE-V 或 5G 移動蜂窩網(wǎng)絡(luò)技術(shù)有著更低的信息時延。對于由于前車駕駛員不良的駕駛習(xí)慣而產(chǎn)生的錯誤預(yù)警信息的過濾,還有等待于以后研究。
-
通信
+關(guān)注
關(guān)注
18文章
6191瀏覽量
137563 -
制動系統(tǒng)
+關(guān)注
關(guān)注
0文章
136瀏覽量
16051 -
數(shù)據(jù)集
+關(guān)注
關(guān)注
4文章
1223瀏覽量
25346
原文標(biāo)題:基于專用短程通信技術(shù)的緊急制動預(yù)警
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
2022年自動緊急制動將被納入大多數(shù)美國汽車技術(shù)標(biāo)準(zhǔn)
康謀分享 | 特斯拉AD/ADAS緊急制動安全分析案例

基于專用短程通信技術(shù)的車車協(xié)同/人車協(xié)同駕駛設(shè)計方案
基于AWR1642的短程雷達解決方案
緊急制動對客車車體強度的影響
專用短程通信(DSRC)技術(shù)在ITS中的應(yīng)用
制動防抱死控制系統(tǒng)(ABS)是什么意思
機械制動輔助系統(tǒng)(BA)
電動汽車安全嗎?特斯拉Model S能不能勝任最安全汽車的位置,緊急制動取消?
汽車應(yīng)用智能輔助駕駛技術(shù) 對司機安全有多大幫助
“汽車自動緊急制動系統(tǒng)AEBS”獲2019年度汽車電子科學(xué)技術(shù)獎突出創(chuàng)新產(chǎn)品獎
中科慧眼第三代AEBS自動緊急制動系統(tǒng)推進智能駕駛發(fā)展
一文聊聊自動緊急制動系統(tǒng)

AEB自動緊急制動系統(tǒng)是什么意思 其工作過程是怎樣的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論