 如何實現全場景動態實時厘米級高精度定位
如何實現全場景動態實時厘米級高精度定位
傳統車載導航系統都是基于導航衛星進行單點定位,幫助駕駛員到達目的地,定位精度是5-20米。隨著自動駕駛系統的使用率提高,例如,車道偏離預警(LDW)、自適應巡航控制(ACC)、自動泊車、自動駕駛,安全性和可靠性需要更高的定位精度。
自動駕駛行業面臨的主要挑戰之一是缺乏可靠高精度定位方案。對于無人駕駛汽車從Demo測試,進入到公開道路測試甚至到商業化落地運營,安全性是首要任務。
高精度定位技術也將是自動駕駛作為安全可靠的交通工具得到公眾認可之前的最后一塊拼圖。
不過,高精度定位技術并不是什么新鮮事。這項技術已經發展幾十年,但設備成本高,阻礙了這項技術在自動駕駛這個利基市場的擴張。
高精度定位技術,除了實時告知車輛位置,還可以用來校準車輛的傳感器。只有有了這樣的系統,才有可能符合ISO26262所要求的自動駕駛車輛的安全要求。
眾所周知,傳統汽車的功能安全主要是在車輛內部,而定位感知則主要來自車輛外部,這就帶來了傳統功能安全的外延在加大。從完整性功能安全角度,包括高精度定位在內的技術,都需要對其數據輸出提供較高的置信度。
“未來的自動駕駛有一個不可或缺的一部分,就是高精度定位。”在星輿科技高精度定位首席研究員杜洪偉看來,環境感知層如何實現全場景動態實時厘米級高精度定位是一個非常關鍵的問題。
一、滿足自動駕駛的高精度定位
目前,自動駕駛定位方案可以分為絕對定位和相對定位。絕對定位輸出定位信息是基于統一的定位坐標體系下的位置,相對定位輸出的是區域內的相對位置信息。
絕對定位的方案,當前都是基于衛星的定位手段,相對定位比較常用的是依靠激光雷達,毫米波雷達,攝像頭這些傳感器,都是相對定位的技術。
按照L4/L5級自動駕駛的定義要求,自動駕駛車輛需要知道它在哪里,定位精度需要在10厘米以內級別。
眾所周知,目前自動駕駛的幾種常用傳感器都有自己的特點,毫米波雷達在很多的場合是很容易受到干擾。攝像頭對于光線比較敏感,對于光線比較昏暗或者光線比較亮的場景下,可靠性達不到自動駕駛的要求。激光雷達成本是非常高昂,在雨雪還有積水惡劣條件下,可靠性降低。而基于衛星的定位,受周圍環境的影響比較嚴重,特別是在障礙物遮擋的領域,定位精度不可靠。
任何單一的傳感器技術都滿足不了自動駕駛的需求,因為每種傳感器都有自己的優缺點。要想實現未來的車與路,車與人,車與車之間的信息交換,達到自動駕駛更高級別安全性的要求,當前的技術方案都有一定的缺陷性。
二、高精度定位的痛點
在杜洪偉看來,自動駕駛高精度定位主要有三大方面的痛點,第一,定位精度有待提升,當前很多的方案的定位精度不能達到厘米級。
第二,復雜場景可靠性有待提升,高架橋,室內、隧道等等這些場景很多方案還不具備這樣一個能力。
第三,實時性有延遲。實時性不好,會降低定位的精度。舉個例子,一輛時速72公里的汽車,每一毫秒行駛的距離是2厘米,如果它的延遲能達到10毫秒,僅僅是延遲帶來的定位誤差就會達到0.2米。由此也可以看出實時性對未來自動駕駛還是要求比較高的。
近年來,行業內也出現了各種不同的定位技術方案,但很多定位技術的方案滿足不了L4或者L5高精度定位的要求,所以必須要有下一代的高精度定位技術,替代傳統定位技術。
下一代的高精度定位技術應該具備三個特點:
第一是全場景,需要滿足各種復雜的場景,包括室內外。
第二是高精度,精度達到可靠的厘米級。
第三是定位結果必須穩定可靠,不能一會精度比較可靠,一會精度又不可靠,這會出現嚴重的安全性問題。
三、多源融合是出路,低成本是關鍵
自動駕駛汽車肯定需要絕對定位。
從《高工智能汽車》的調研來看,融合在定位技術方案上也是一大趨勢,自動駕駛系統需要一個“盒子”,一方面提供車輛實時精準定位以及所有需要的性能。同時,它還能與其他類型的傳感器進行融合。
對于高精度定位市場來說,傳感器融合有很多好處,包括降低成本,提高性能以獲得更好的位置或位置的可用性,增加可靠性和魯棒性。
未來的高精度定位系統通過結合不同類型傳感器,比如IMU、輪速傳感器、GNSS傳感器、攝像頭和激光雷達的各種優缺點,將這些傳感器輸出融合成一個具有多種用途的大數據集,充分展示了傳感器數據融合的威力。
星輿科技提出的下一代定位技術,就是指基于“RTK+IMU+視覺+高精度地圖”的多源融合技術路線。
2019年1月16日晚,星輿科技獲得《2018高工智能汽車年度金球獎評選》年度國產高精度定位方案商獎項。
關于成本的問題是這個領域的主要因素。設計人員必須能夠同時集成安全性、性能和復雜性,而不需要在每個方面進行任何權衡,這將影響硬件和軟件設計。
從OEM廠商的量產角度來說,就是要求低成本的高精度定位技術方案,把成本控制在千元級別。
杜洪偉表示,星輿科技的定位就是研發低成本的高精度定位技術方案,把不同的傳感器通過數據的深度融合,從空間和時間的緯度進行深度融合,可以滿足更多復雜場景的高精度定位的需求。同時,可以提高算法可靠性,當然最關鍵是價格比較低。
為什么要提多源融合?在杜洪偉看來,主要有三大方面的優勢:
一是每種傳感器都有自己的缺點,多源融合在一起,每個傳感器的優勢可以實現互補,可以滿足更多復雜場景的高精度定位的需求。
二是多傳感器的數據,因為數據冗余度比較多,所以可以通過計算輸出的定位結果的置信度。當前所有的定位方案里面,定位結果都缺少置信度的數據,而置信度是可以很好輔助自動駕駛做決策的。如果只是給自動駕駛大腦提供數據,讓決策層決策,是不能很好的服務自動駕駛,定位結果的置信度也是一個關鍵性的指標。
三是采用多源數據融合的解決方案,避免單節點的故障導致的數據失效,可以更進一步的提高自動駕駛的安全性。
基于多源融合,星輿科技提出了更多的完善方案,一是基于衛星的RTK技術。當前很多基于衛星的方案,單點定位精度是5-20米的精度,如果要基于RTK技術可以提高到厘米級。
基于RTK的技術,重點解決空曠和半遮擋環境下的高精度定位,遮擋下的高精度定位需要用其他的技術方案補充,比如說機器視覺,SLAM技術來解決遮擋定位技術。
還有就是基于高精度地圖,結合了機器視覺識別,和地圖匹配的技術,來完成相對定位的目的,同時結合地圖數據也可以解決遮擋或者全場景下的高精度定位。
目前,基于衛星的導航系統總是存在一些固有的弱點。GNSS信號較弱,不能穿透多層停車場、隧道等建筑物,密集樓宇區存在反射率和衛星能見度問題。其他潛在的問題包括易受有意和無意信號干擾的影響。
這些潛在的問題可以通過與其他定位傳感器和高度精確的數字地圖的混合來克服,從而實現高精度定位技術最終能夠在室內外環境中移動時提供無縫定位功能。
四、北斗高精度定位網絡+融合定位
此前,國家發改委的公布信息顯示,國家已啟動國家智能汽車創新發展戰略起草工作,其中,北斗高精度定位將作為重點領域的核心技術之一,進行重點支持和突破,以滿足高級別智能汽車的應用要求。
星輿科技正是依托北斗高精度網絡,在全國范圍內部署自主研發的智能觀測站,構建覆蓋全國的高精度定位網絡,使得基于衛星的定位方案可達到厘米級。
普通的GPS或北斗定位,只需看到4顆衛星,高精度定位,需要看到至少8顆衛星。在亞太地區,北斗比GPS更有優勢,因為在亞太地區,北斗衛星遠多于其他的導航系統,網眼最密處在中國上空,衛星數提升、衛星更加密集、通過衛星定位更加穩定可靠,加上北斗三號將于2020年實現全球組網,屆時優勢會更明顯,到2020年,在中國上空,同時存在北斗二號、北斗三號、GPS、伽利略、格洛納斯,可同時用于高精度定位。
此外,北斗使用三頻信號,GPS是雙頻信號,三頻比雙頻有更高的可靠性和抗干擾能力,北斗兼容GPS和其他導航系統,還可以輔助提高定位精度。因此,綜合來看,中國有北斗,中國基于衛星定位的高精度技術應用環境會更好。
當前星輿的北斗高精度定位網的覆蓋范圍包括廣東、湖南、湖北、長三角,京津冀等國內主要核心省市,在未來一年內將覆蓋全國重點城市區域。
依托北斗高精度定位網絡和先進的融合定位算法,星輿科技可以為智能網聯汽車提供基于RTK絕對定位坐標參數。
星輿的北斗高精度定位網有三個特點,一是秒級響應。二是支持億級高并發,三是分布式的部署還有冗余設計,更高程度提高網絡可靠性,達到電信級別的可靠性。北斗高精度定位網可服務于高精度定位和眾包高精度地圖采集,把定位精度提升到厘米級。
基于高精度地圖的定位方案,主要是通過識別興趣點,然后基于興趣點和高精度地圖進行匹配,匹配到相關的興趣點,通過地圖得到興趣點的先驗精確位置數據,最后基于視覺相對定位的原理來計算相機的姿態和相對興趣點的距離,以此來計算相機的位置。
目前,這種基于高精度地圖定位的方案需要高精度地圖中添加更多的POI數據,隨著POI數據的增加,這種定位技術會更加成熟。
星輿科技于2018年11月份在深圳舉辦的第二十屆高交會上,發布了首款千元級別AI融合定位終端,可以滿足全場景全天侯的高精度定位要求。
此外,高精度定位網絡也是眾包高精度地圖方案的剛需。要打造全國高精度地圖“一張網”,離不開覆蓋全國的高精度定位網。
目前,星輿科技的高精地圖方案采用“機器視覺+RTK+IMU”的云端地圖實時采集更新技術。除了豐富的道路元素數據信息,不僅有高精度的坐標,還有準確的道路形狀,具有每個車道的坡度、曲率、航向、高程、側傾的數據。
杜洪偉介紹,星輿科技的高精度地圖數據采集已經覆蓋珠三角,采集端主要是依靠出租車、物流車上搭載的終端(終端體積小,直接安裝在前擋風玻璃),采集地圖的數據。
同時,星輿科技的所有的地圖都是在云端實時更新,地圖的精度通過打點采集和多源測量進行驗證,定位精度可以做到20厘米級,并且做到室內室外一體化。
杜洪偉介紹,眾包高精度地圖采集終端結合多源融合定位技術,定位和測量精度均可達到厘米級,采用云端自動化的處理,自動化的程度當前已經達到90%以上,同時星輿科技的相關算法和云端處理還在繼續做優化。
-
gps
+關注
關注
22文章
2898瀏覽量
166333 -
自動駕駛
+關注
關注
784文章
13856瀏覽量
166590
原文標題:自動駕駛第四只眼:如何實現全場景動態實時厘米級高精度定位 | GGAI頭條
文章出處:【微信號:ilove-ev,微信公眾號:高工智能汽車】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
精訊暢通發布RTK+4G定位模塊,開啟厘米級定位新時代
巍泰技術高精度 UWB 信標定位系統介紹及應用價值分析
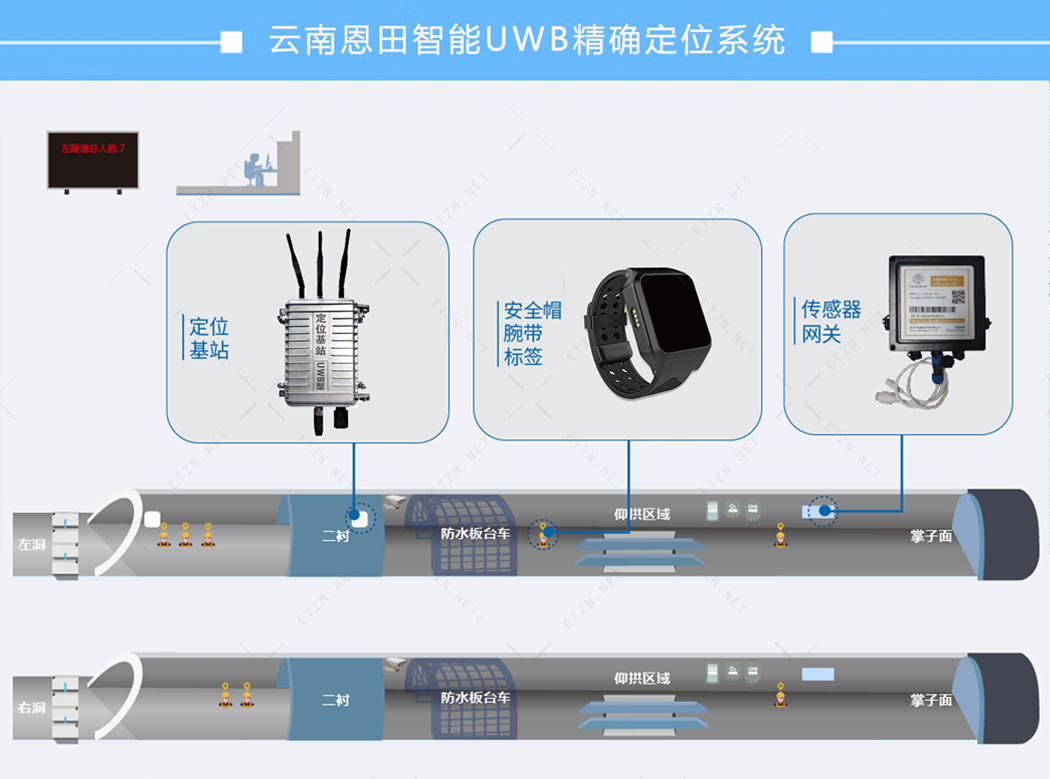
云南恩田隧道 UWB 定位系統應用于隧道場景的高精度定位技術系統
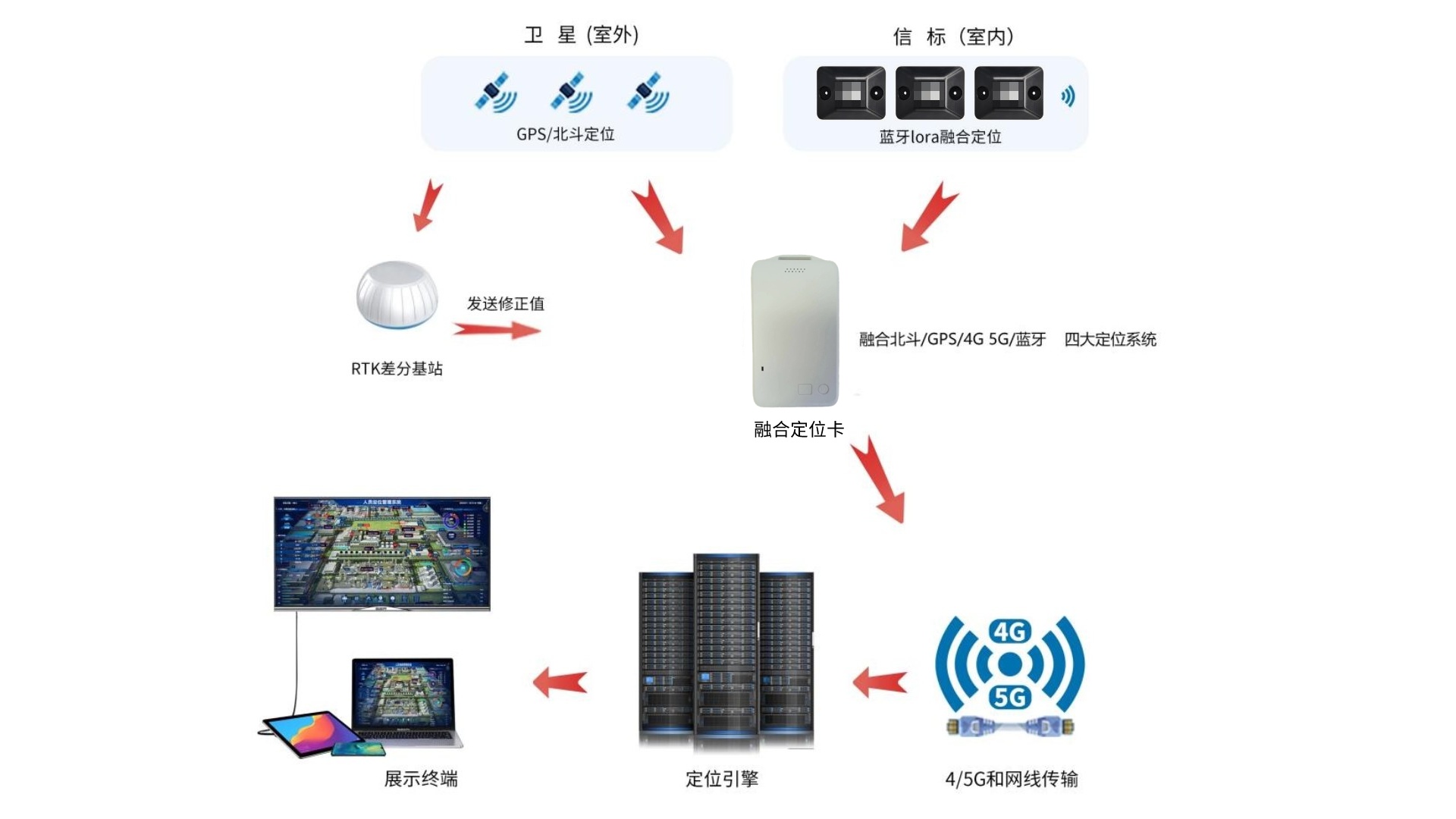
物聯網系統中高精度RTK定位方案的實現_高精度定位模塊

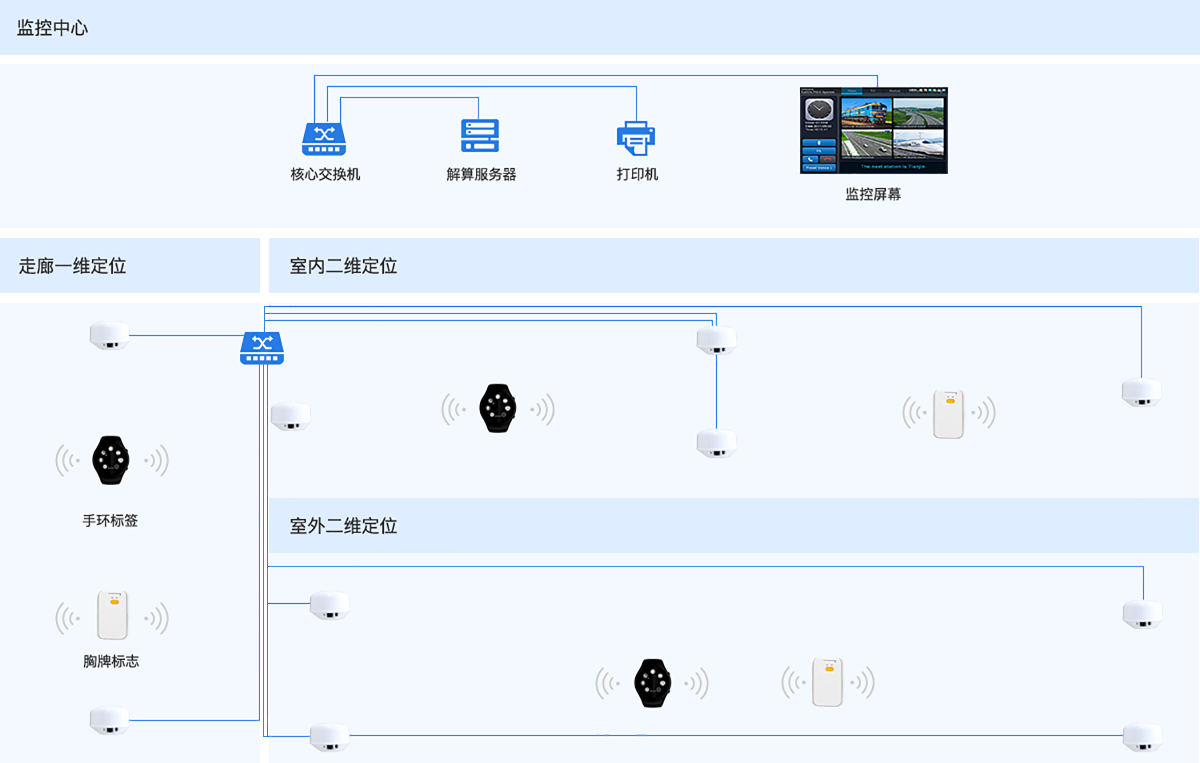
工業制造領域高精度人員定位系統(源碼)
北斗RTK高精度定位技術原理、技術優勢及應用領域









 工商網監
工商網監
評論