 2018年AIOT產業藍皮書已正式發布
2018年AIOT產業藍皮書已正式發布
2018年AIOT產業藍皮書已正式發布
水下機器人行業初步研究
水下機器人從20世紀后半葉誕生,是工作于水下的極限作業機器人,能潛入水中代替人完成某些操作,主要運用在海上救援、水中考察、探險及娛樂等。由于水下環境惡劣危險,人的潛水深度有限,所以水下機器人日益成為開發海洋的重要工具。
01水下機器人分類
廣義上水下機器人也可以稱作潛水器(Underwater Vehicles),是一種可以在水下代替人在充滿未知和挑戰的海洋環境中完成某種任務的裝備。由于風、浪、流、深水壓力等各種復雜的海洋環境對水下機器人的運動和控制干擾嚴重,使得水下機器人的通信和導航定位十分困難,這也是它與陸地機器人最大的不同,也是目前阻礙水下機器人發展的主要因素。
就外形看,目前大部分水下機器人是框架式或類似于潛艇的回轉細長體,隨著仿生技術的不斷發展,仿魚類形態甚至是運動方式的水下機器人將會不斷發展。
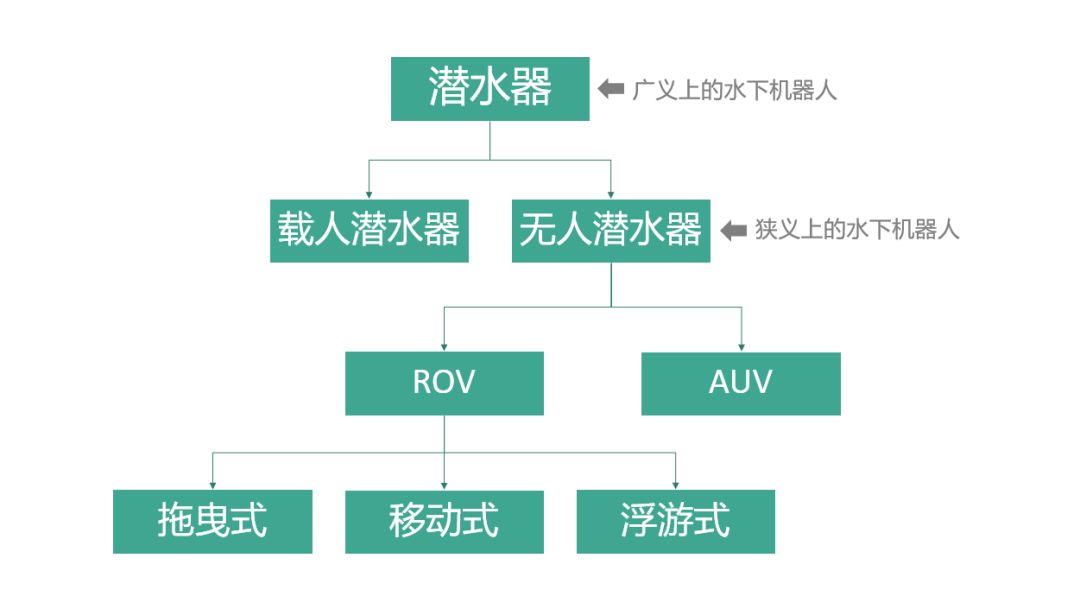
從種類上看,根據是否載人可以將潛水器分為載人潛水器和無人潛水器
載人潛水器由人工輸入信號操控各種動作,由潛水員和科學家通過觀察窗直接觀察外部環境。 其優點是由人工親自做出各種核心決策,便于處理各種復 雜問題,但是人生命安全的危險性增大,由于載人需要足夠的耐壓空間、可靠的生命安全保障和生命維持系統,這將為潛水器帶來體積龐大、系統復雜、造價高昂、工作環境受限等不利因素。
狹義上的水下機器人是指無人潛水器。無人潛水器按照與水面支持系統間聯系方式的不同可以分為有纜遙控水下機器人(remotely operated vehicle,簡稱 ROV)、無纜水下機器人 (autonomous underwater vehicle,簡稱 AUV))兩種。
有纜水下機器人
有纜水下機器人都是遙控式的,根據運動方式不同可分為拖曳式、(海底)移動式和浮游(自航)式三種。
有纜水下機器人(ROV)需要由電纜從母船接受動力,并且 ROV 不是完全自主的,它需要人為的干預。主要由水面設備(包括操縱控制臺、電纜絞車、吊 放設備 、供電系統等)和水下設備(包括中繼器和潛水器本體)組成。潛水器本 體在水下靠推進器運動,本體上裝有觀測設備(攝像機、照相機、照明燈等)和作業設備(機械手、切割器、清洗器等)。潛水器的水下運動和作業,是由操作員在水面母艦上控制和監視,電纜向本體提供動力和交換信息,中繼器可減少電纜對本體運動的干擾。由于人們通過電纜對ROV進行遙控操作,電纜對ROV像“臍帶”對于胎兒一樣至關重要,但是由于細長的電纜懸在海中成為 ROV最脆弱的部分,大大限制了機器人的活動范圍和工作效率。
無纜水下機器人
無纜水下機器人一般是自治式機器人,它能夠依靠本身的自主決策和控制能力高效率地完成預定任務,在一定程度上代表了目前水下機器人的發展趨勢。
無纜水下機器人(AUV)又稱智能水下機器人,是將人工智能、探測識別、信息融合、智能控制、系統集成等多方面的技術集中應用于同一水下載體上,在沒有人工實時控制的情況下,自主決策、控制完成復雜海洋環境中的預定任務使命的機器人。它能對觀測信息進行加工,建立環境和內部狀態模型。操作人員通過人機交互系統以面向過程的抽象符號或語言下達命令,并接受經計算機加工處理的信息,對潛水器的運行和動作過程進行監視并排除故障。操作人員僅下達總任務,機器人就能根據識別和分析環境,自動規劃行動、回避障礙、自主地完成指定任務。
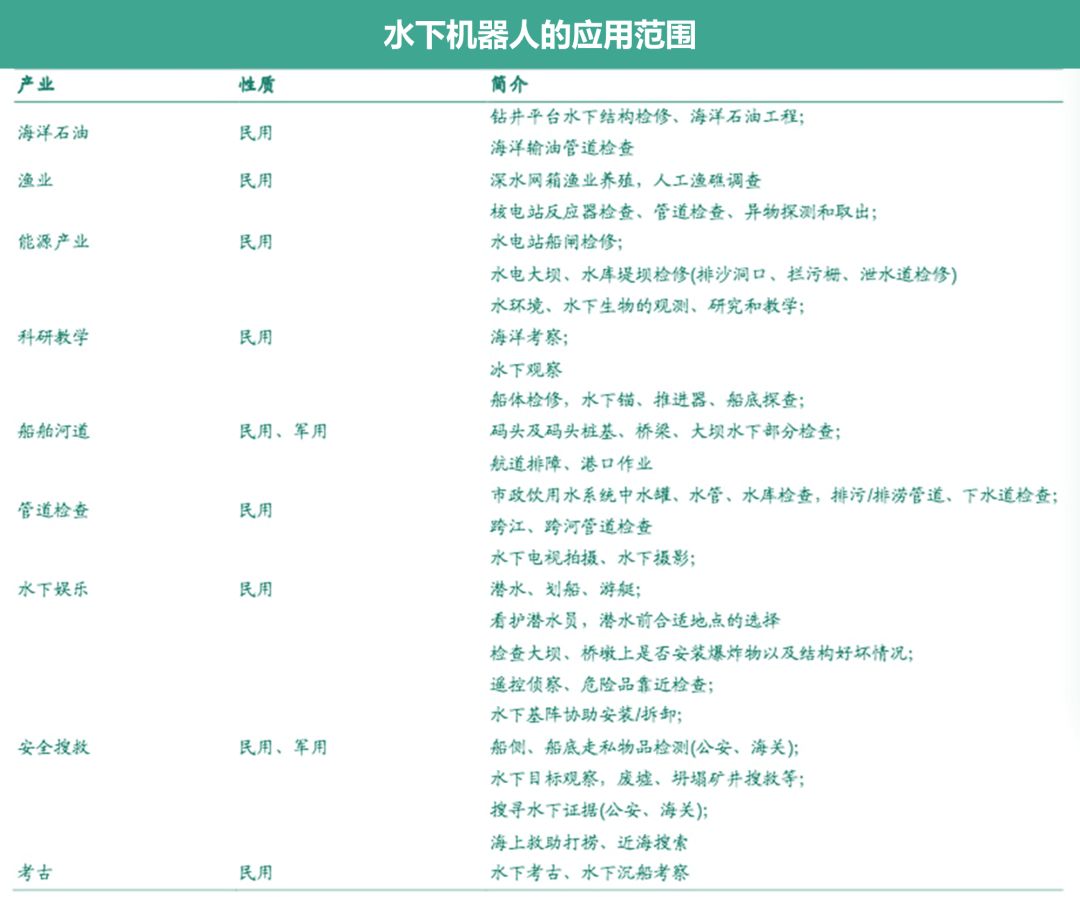
從應用場景來看,水下機器人可以分為消費類水下機器人或產業型水下機器人
消費型機器人主要滿足消費者在水中進行攝影、牌照、探險等娛樂性需求,類似于消費類無人機,如大疆無人機,滿足的是用戶航拍的需求。
產業型水下無人機主要應用于商業領域,主要服務于軍事、海洋環境探測、海洋救援、海洋漁業、城市船舶河道等領域。
02水下機器人發展歷程
從1934年美國研制出下潛934米的載人潛水器到1953年研制出無人有纜遙控潛水器,接著是全世界各國對水下機器人的大力發展,到2013年,全世界大約共建造了5756臺各類水下機器人,其中作業級水下機器人914臺、觀察型機器人2656臺、AUV134臺、軍事服務型1733臺、其余調查型機器人319臺。
總結起來,水下機器人發展大致經歷了三個階段:
第一階段:從1953年至1974年為第一階段,主要進行潛水器的研制和早期的開發工作。先后研制出20多艘潛水器,其中美國的CURV系統在西班牙海成功地回收一枚氫彈,引起世界各國的重視。美國海軍1956年研制出的CURV1號機器人在服役期間曾執行數百次使命,其中包括從海底回收100多枚魚雷。
第二階段:1975至1985年是遙控潛水器大發展時期。海洋石油和天然氣開發的需要,推動了潛水器理論和應用的研究,潛水器的數量和種類都有顯著地增長。載人潛水器和無人遙控潛水器(包括有纜遙控潛水器、水底爬行潛水器、拖航潛水器、無纜潛水器) 在海洋調查、海洋石油開發、救撈等方面發揮了較大的作用。
第三階段:1985年,潛水器又進入一個新的發展時期。80年代以來,中國也開展了水下機器人的研究和開發,研制出“海人”1 號(HR-1)水下機器人,成功地進行水下實驗。
我國的水下機器人研究是從立足軍事需求起步的。我國對于水下機器人的研究與開發起步較晚,從七十年代末才開始研究,相比于歐美國家和日本,我國一直處于落后水平。
七十年代末起,中國科學院沈陽自動化研究所和上海交通大學開始從事 ROV 的研究與開發工 作,合作研制了我國第一個 ROV“海人一號”ROV,“海人一號”是我國獨立自主研發的第一臺大型水下機器人。到目前軍用水下機器人已經服役并正在形成系列,特別是 6000m 深水下機器人的問世,表明我國在此領域已經取得了一定成績。
03
水下機器人的關鍵技術
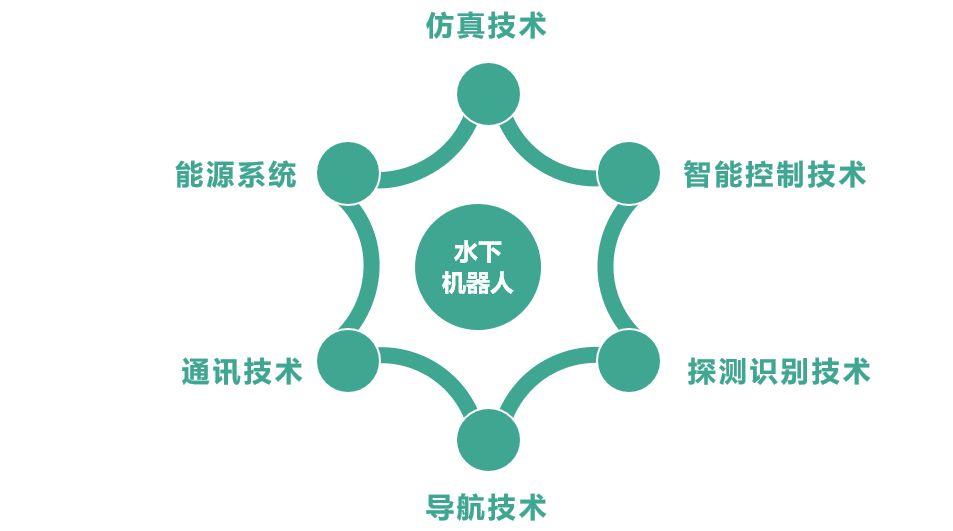
水下機器人是一種技術密集性高、系統性強的工程,涉及到的專業學科多達 幾十種,主要包括仿真、智能控制、水下目標探測與識別、水下導航(定位)、通訊、能源系統等六大技術。
由于水下機器人的工作區域是不可接近的海洋環境,其復雜性決定了真實硬件與軟件體系的研究和測試比較困難。為此在水下機器人的方案設計階段,要進行仿真技術研究,內容為兩部分:
平臺運動仿真。按給定的技術指標和水下機器人的工作方式,設計機器人平臺外形并進行流體動力試驗,獲得仿真用的水動力參數。一旦建立運動數學模型、確定邊界條件后,就能用水動力參數和工況進行運動仿真,解算各種工況下平臺的動態響應。如果根據技術指標評估出的平臺運動狀態與預期存在差異,則通過調整平臺尺寸、重心浮心等技術參數后再次仿真,直至滿足要求為止。
控制硬、軟件的仿真。控制硬、軟件裝入平臺前,先在實驗室內對單機性能進行檢測,再對集成后的系統在仿真器上做陸地模擬仿真試驗,并評估仿真后的性能,來降低在水中對控制系統調試和檢測所產生的巨大風險。內容包括動密封、抗干擾、機電匹配、軟件調試。另外,上述所需的仿真器主要由模擬平臺、等效載荷、模擬通訊接口、仿真工作站等組成。
智能控制技術
智能控制技術旨在提高水下機器人的自主性 ,其體系結構是人工智能技術、各種控制技術在內的集成,相當于人的大腦和神經系統。軟件體系是水下機器人總體集成和系統調度,直接影響智能水平,它涉及到基礎模塊的選取、模塊之間的關系、數據(信息)與控制流、通訊接口協議、全局性信息資源的管理及總體調度機構。
水下目標探測和識別技術
目前,水下機器人用于水下目標探測與識別的設備有合成孔徑聲納、前視聲納和三維成像聲納等水聲設備。
合成孔徑聲納是用時間換空間的方法、以小孔徑獲取大孔徑聲基陣的合成孔徑聲納,非常適合尺度不大的水下機器人,可用于偵察、探測、高分辨率成像,大面積地形地貌測量等。
前視聲納組成的自主探測系統是指前視聲納的圖像采集和處理系統,在水下計算機網絡管理下自主采集和識別目標圖像信息,實現對目標的跟蹤和對水下機器人的引導。通過不斷的試錯,找出用于水下目標圖像特征提取和匹配的方法,建立數個目標數據庫。特別是在目標圖像像素點較少的情況下,較好的解決數個目標的分類和識別。系統對目標的探測結果,能提供目標與機器人的距離和方位,為水下機器人避碰與作業提供依據。
三維成像聲納,用于水下目標的識別,是一個全數字化、可編程、具有靈活性和易修改的模塊化系統。可以獲得水下目標的形狀信息,為水下目標識別提供了有利的工具。
水下導航(定位)技術
用于自主式水下機器人的導航系統有多種,如慣性導航系統、重力導航系統、海底地形導航 系統、地磁場導航系統、引力導航系統、長基線、短基線和光纖陀螺與多普勒計程儀組成推算系統等,由于價格和技術等原因,目前被普遍看好的是光纖陀螺與多普勒計程儀組成推算系統,該系統無論從價格上、尺度上和精度上都能滿足水下機器人的使用要求,國內外都在加大力度研制。
通訊技術
目前的通訊方式主要有光纖通訊、水聲通訊。
光纖通訊由光端機(水面)、水下光端機、光纜組成。其優點是數據率高(100Mbit/s), 很好的抗干擾能力。缺點是限制了水下機器人的工作距離和可操縱性,一般用于帶纜的 水下機器人。
水聲通訊由于聲波在水中的哀減慢,對于需要中遠距離通訊的水下機器人,水聲通訊是 唯一的、比較理想的一種方式。實現水聲通訊最主要的障礙是隨機多途干擾,要滿足較 大范圍和高數據率傳輸要求,需解決多項技術難關。
能源系統技術
水下機器人、特別是續航力大的自主航行水下機器人對能源系統的要求是體積小、重量輕 、能量密度高、多次反復使用、安全和低成本。目前的能源系統主要包括熱系統和電-化能源系統兩類。
熱系統是將能源轉換成水下機器人的熱能和機械能,包括封閉式循環、化學和核系統。其中由化學反應(鉛酸電池、銀鋅電池、鋰電池)給水下機器人提供能源是現今一種比較實用的方法。
電-化能源系統是利用質子交換膜燃料電池來滿足水下機器人的動力裝臵所需的性能。該電池的特點是能量密度大、高效產生電能,工作時熱量少,能快速啟動和關閉。但是該技術目前仍缺少合適的安靜泵、氣體管路布臵、散熱、固態電解液以及燃料和氧化劑的有效存儲手段。
水下機器人一旦突破技術瓶頸,進口替代空間廣闊。但是由于在探測技術、工藝水平、綜合顯控、綜合導航與定位等技術上存在的差距較大,致使國產水下機器人的實際應用受到限制,目前國內在不同領域的應用客戶許多是購買或租借國外現有產品,不僅價格高、配套服務難, 而且有些產品并不適合中國海區的使用特點,機動性、抗流能力及作業能力都顯不足。
04國內主要公司
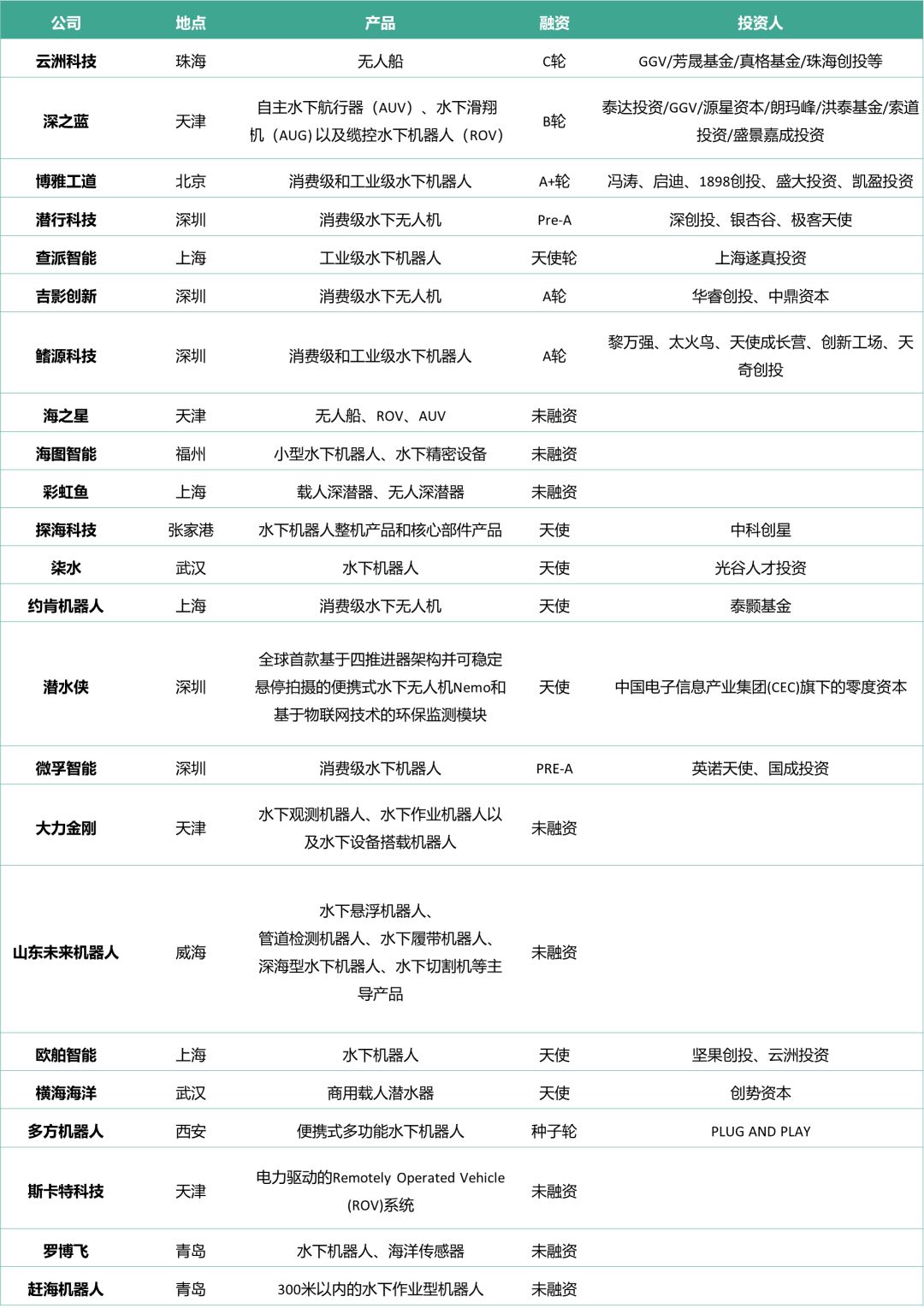
格物資本對水下機器人行業公司進行了盤點。目前,國內圍繞水下機器人的創業公司總數不超過100家,絕大多數公司比較傳統,僅有20家左右的公司獲得融資。
消費級水下機器人:值得關注的公司有吉影創新、博雅工道、鰭源科技、潛行科技、約肯機器人等。但目前消費級水下機器人出貨量還很少,格物資本通過京東、天貓等電商平臺搜索發現,上述品牌均無評論,僅臻迪水下無人機所有型號共計不到100個評論。我們認為,水下機器人的消費興趣還沒形成,市場還需進一步培育。
產業型水下機器人:深之藍、博雅工道、查派智能、鰭源科技等公司值得關注。
其中深之藍累計完成了泰達投資/GGV/源星資本/朗瑪峰/洪泰基金/索道投資/盛景嘉成投資等十余家投資機構超過4億的融資,目前產品在國內處于領先地位,應用于打撈救援、水產養殖、科考等領域。
此外,還有一家公司云洲科技值得關注,盡管該公司生產的主要產品為無人船,水下機器人僅為附屬產品,但該公司在無人船領域技術十分先進,曾多次獲得國家環保部的認可和贊揚,應用在很多次救援及科考行動中。該公司也獲得了GGV/芳晟基金/真格基金/珠海科技創投等多家機構的數億元投資。
水下機器人創業公司統計整理:
-
無人機
+關注
關注
230文章
10461瀏覽量
180997 -
水下機器人
+關注
關注
2文章
94瀏覽量
13673 -
潛水器
+關注
關注
1文章
17瀏覽量
7667
原文標題:水下機器人行業初步研究
文章出處:【微信號:GeWu-IOT,微信公眾號:物聯網資本論】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
軟通動力ESG創新實踐入選2024中國企業ESG藍皮書
軟通動力ESG創新實踐成功入選2024中國企業ESG藍皮書

軟通動力入選2024中國企業ESG藍皮書案例
達實智能入選《2025年中國AIoT產業全景圖譜》
《2024中國大圓柱鋰電池行業發展藍皮書》發布,比克電池以先進大圓柱布局多領域應用


華為發布天線數字化白皮書
中科曙光聯合發布《智能算力產業發展白皮書》
資訊|TAF2024第二次會議針對eSIM發展趨勢藍皮書
廣和通聯合中興通訊等產業伙伴發布5G RedCap白皮書

廣和通聯合中興通訊等產業伙伴發布5G RedCap白皮書

用友攜手英特爾發布《用友BIP+英特爾第四代至強私有化部署藍皮書》
東盟能源和華為主編的《東盟下一代數據中心建設白皮書》正式發布






 工商網監
工商網監
評論