 飛馬無人機在1:2000地形圖快速成圖中的應用
飛馬無人機在1:2000地形圖快速成圖中的應用
一、項目背景
1.1項目介紹
我國內蒙古自治區風能資源豐富,其作為鄰近華北、東北和西北電網的負荷中心,是國家落實可再生能源發展規劃的目標地區、是開發建設百萬及千萬千瓦級風電基地的重要地區,被國家確定為“風電三峽”基地。
為了保障風電建設項目的順利實施,我司受甲方委托,協助甲方在20天內完成了內蒙古自治區某地1619平方公里的1:1000數字正射影像、1:1000數字高程模型、1:2000數字線劃圖的制作任務。該項目要求時效性強,因此所有成果為全新數據采集,非修補測。
圖1.1 1測區范圍
圖1.2 2測區范圍
1.2項目特點
(1)有人機因航高問題短時間內無法審批,因此無法采用有人機作業。
(2)該地區常年風力較大,且項目實施月份大風、降雨等惡劣天氣較多,因此需要選擇抗風性能好、效率高的無人機進行作業。
(3)該測區以草原地貌為主,無法選到適合的事后像控點位,而且牧民對草場非常重視,如果給草場帶來損害會造成不良影響,因此布設事前像控也較困難。
(4)在空三過程中,如果通過傳統刺像控點的方式進行空三處理,需要耗費大量的選片刺點時間,增加了空三作業時間。
(5)該項目要求總工期為20天,包含前期的控制作業,且最終成果幾乎涵蓋了全部的4D產品,并要求統一提交。若采用傳統手段,僅完成DLG線劃圖一項就需要組織不少于80~100人的專業測圖隊伍,但實際投入人員僅有25人。
二、技術路線
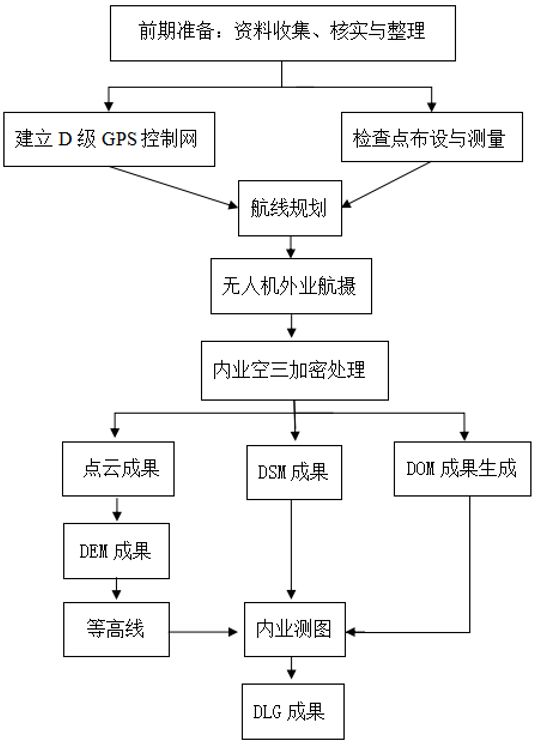
圖2.1 技術路線流程圖
三、作業流程
3.1 控制測量
根據甲方需求,在測區范圍內建立了一套D級GPS平面控制網,并提供國家西安80和國家CGCS2000兩套坐標系統的控制成果。
3.1.1 控制點埋石
埋石按照技術要求規格制作,預制樁中心埋設7cm帶測量標志的不銹鋼構件。
圖3.1 控制點埋石
3.1.2 靜態觀測及處理
在靜態控制施測前,根據靜態控制網的布設方案、規模的大小、精度要求、衛星星座的選擇、參與作業的GPS接收機數量以及后勤保障條件(交通、通信)等,制定了詳細的觀測計劃。
該項目外業靜態數據觀測共投入作業人員十二人,GPS接收機十二臺,共觀測了四十二個GPS點位,每天觀測三個時段,歷時三天完成了整個區域的靜態數據觀測和解算。
3.2 無人機外業采集
3.2.1 無人機選型
根據測區的實際情況,該項目最終選用了飛馬F300電動無人機作為飛行平臺。首先,該款無人機最大起飛重量小于7公斤,屬于輕型無人機,且具備第三方責任險,符合國家相關規定。其次,該款無人機支持RTKPPK融合技術,可以實現免像控作業,從而解決了內蒙地區難以布設像控的困難。同時,該無人機在5級風力情況下可以安全穩定的飛行,適宜在該測區應用。飛馬F300電動無人機搭載了SONY黑卡相機,該相機具備4200萬像素,可以滿足傳統立體測圖的需要。
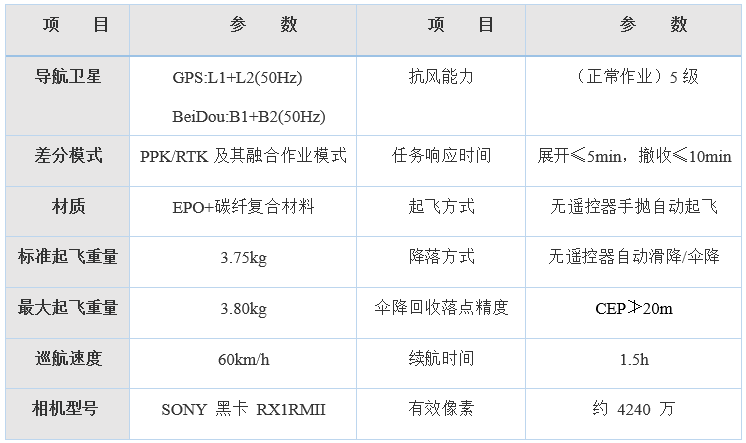
表3.1 飛馬無人機技術參數表
3.2.2外業檢查點布設及采集
該項目選用的無人機機型,支持免像控功能,原則上不需要布設像控點。但是為了后期檢查成果精度的需要,在測區范圍內,布設適當的檢查點。為了提高作業效率,檢查點的布設與區域控制點的布設重疊,在控制測量觀測的同時,采集外業檢查點成果。
圖3.4 控制點和航測檢查點重疊觀測
3.2.3 影像數據采集
(1)地面布設相片精度檢查點
圖3.5 檢查點布設
(2)飛控軟件(地面站)設置
①飛行各項參數設置
圖3.6 飛行參數設置
②航線設置
圖3.7 航線規劃設置
(3)架次劃分
1測區F300無人機共計飛行45架次,合計飛行401平方公里。
2測區F300無人機共計飛行132架次,合計飛行約1225平方公里。
圖3.8 1測區各架次分布狀況
圖3.9 2測區各架次分布狀況
(4)無人機手拋起飛
圖3.10 無人機手拋起飛
(5)飛行質量檢查
本項目飛行質量較好,航線彎曲度較小,飛行時間都選在陽光充足、風向穩定的時段。
像片有效范圍覆蓋了技術設計要求的全部攝區。在航向上超出成圖范圍的基線均在一條以上,旁向上超出成圖范圍均為像幅的30%以上,全區無攝影絕對漏洞。航向重疊:一般在 75%左右,最小為 70%,最大達 80%,滿足成圖要求。旁向重疊:一般在 60%左右,最小為 55%,最大達 65%,滿足成圖要求。像對中像片旋偏角:一般小于 4°,有少數像對在 5°~7°之間。航線彎曲度:所有的彎曲度均小于 2%,符合設計要求。
3.3內業數據處理
3.3.1 內業處理流程
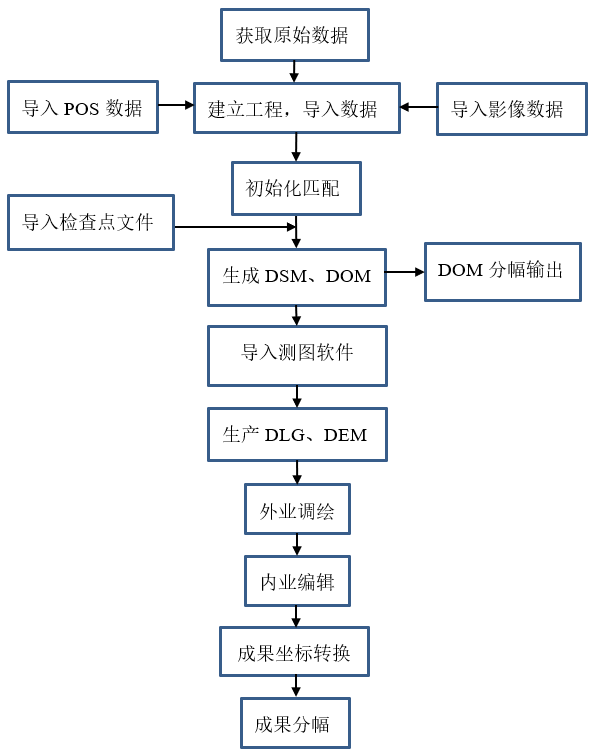
圖3.11 內業處理流程圖
3.3.2 數據預處理
數據處理系統采用無人機管家專業版軟件,該系統空三像點精度優于 2/3 個像素,正射影像精度不大于3個像素,成圖精度滿足1:1000 DOM、1:1000DEM 和 1:2000DLG精度。
3.3.3 空三加密
采用無人機管家專業版軟件進行空三加密,加密點誤差不大于3個像素。空三加密成果滿足 1:2000 比例尺成圖要求:地物點位中誤差小于0.3m,高程中誤差小于0.5m。
圖3.12 檢查點預測
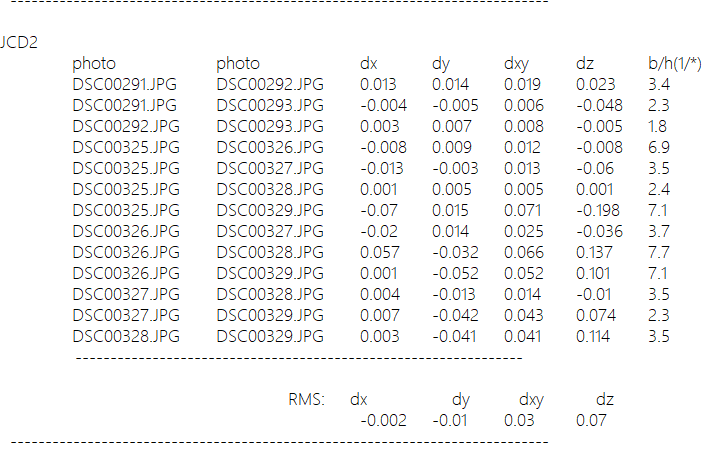
圖3.13 檢查點精度報告
3.3.4 DOM與DEM生產
采用無人機管家專業版軟件進行DOMDEM的數據生產。通過生成密集點云得到正射影像成果,充分檢查落在建筑、大型植被等處的高程點云。利用飛馬智激光模塊分類過濾點云,輸出DEM。
圖3.14點云過濾后生成DEM
3.3.5 DLG生產
利用空三成果DOM及DEM,導入測圖軟件,手動采集地物地貌,智激光點云分類,導出等高線,用于地形圖編輯時作為輔助檢查和參照。
圖3.15生成等高線
圖3.16 生成等高線與修測等高線對比
四、航測精度情況
4.1 空三精度情況
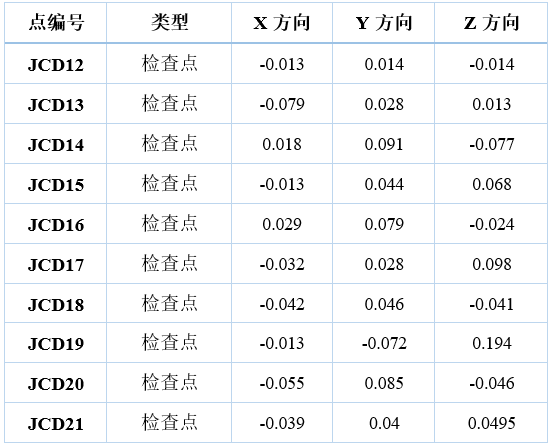
表4.1精度檢查表
4.2 平面及高程精度情況
4.1平面精度情況
圖4.2高程精度情況
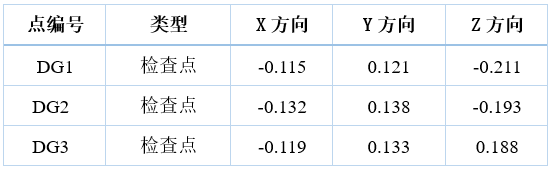
表4.2部分調繪點精度檢查
4.3 空三接邊精度檢查
4.3.1不同架次接邊位置平面精度檢查
圖4.3五架次接邊處影像
圖4.4六架次接邊處影像
4.3.2不同架次接邊位置高程精度檢查
圖4.5 五架次接邊處數字高程模型
圖4.6 六架次接邊處數字高程模型
五、總結
5.1飛馬F300無人機抗風及續航性能
內蒙地區8月份平均風力在4級以上。在5級風力情況下,飛馬F300無人機的飛行航時不低于1小時,航程57公里左右。在地面分辨率為8cm時,單架次作業面積在9.5平方公里左右。同時外業影像數據獲取的質量穩定,各架次間的精度滿足技術設計要求。
正是因為飛馬無人機的高效率,以及組裝過程的便捷性,使得在外業航測實施過程中,單架無人機一天可飛行十架次,總面積達100平方公里。本次項目共動用了四架飛馬F300無人機,實際耗時5天即完成了外業影像數據的采集任務,為內業工作爭取了大量的時間。
除此之外,由于飛馬F300無人機的智能化程度很高,在該項目中,飛手在外業飛行時,可以同時控制兩架無人機開展作業。這些都為項目的進度提供了可靠的保障。

圖6.1外業飛行設置
5.2 飛馬F300在免像控中的優勢
飛馬F300無人機免像控效果顯著,尤其本次項目需求1:2000線劃圖成果,經過多方面精度的檢查,飛馬F300無人機免像控的成果精度,完全符合設計要求。相比傳統依靠地面像控點的作業方式,其節省了大量的外業像控采集的作業人員和作業時間,使得外業人員主要工作集中在外業調繪等工序中。同時免像控也大幅度提升了內業空三的作業效率,減少了空三所占用的大量時間。
5.3 無人機管家專業版影像處理的優勢
無人機管家專業版對于影像畸變的處理算法,使得空三成果精度得到有效保障。且在無人干預即不手動添加人工連接點的情況下,空三通過率較高。通過170多架次的空三解算來看,無人機管家專業版一次性滿足精度的通過率在98%以上。
5.4 無人機管家專業版在數據成果方面的優勢
無人機管家專業版可以導出包括DOM、DSM、點云等成果。尤其是在DOM面積較大,成果文件大小超過2Gb時自動生成了金字塔。這樣在往測圖軟件導入過程中,就不需要額外等待建立金字塔的過程,以及漫長的加載過程,提高了內業測圖的效率。
而伴隨著飛馬激光的應用,無人機管家專業版中的點云分類、DEM生成、等高線生成等都為內業數據采集時提供了更加準確和詳細的參考依據。在很大程度上提高了繪制等高線的效率。
六、成果照片
6.1 線劃圖成果與正射影像套合
圖6.1 部分DOM(正射影像)及DLG(線劃圖)
6.2 線劃圖成果與數字高程模型套合
圖6.2 部分DEM(數字高程模型)及DLG(線劃圖)
-
接收機
+關注
關注
8文章
1182瀏覽量
53513 -
無人機
+關注
關注
230文章
10454瀏覽量
180840 -
控制測量
+關注
關注
0文章
2瀏覽量
5442
原文標題:飛馬無人機在1:2000地形圖快速成圖中的應用
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
行者X500多旋翼無人機在地形測繪作業中的優勢
DIY了一臺無人機,用全志T113芯片
科技防線:無人機干擾系統如何保障空域安全 特信無人機反制
激光雷達在無人機中的應用實例
開源項目!DIY了一臺無人機,用全志T113芯片
無人機全波段偵測跟蹤 杜絕類似天津黑飛事件

無人機巡檢系統光伏巡檢方案與作用
特信無人機反制設備 手持無人機探測器:精準定位,快速反制





 工商網監
工商網監
評論