") 導(dǎo)向?yàn)V波(Guided Filter)的解析與實(shí)現(xiàn)
導(dǎo)向?yàn)V波(Guided Filter)的解析與實(shí)現(xiàn)
現(xiàn)在從一個(gè)最簡(jiǎn)單的情形來(lái)開始我們的討論。假設(shè)有一個(gè)原始圖像 pp,其中含有一些噪聲,欲將這些噪聲濾出,最簡(jiǎn)單的、最基本的方法,大家可能會(huì)想到采用一些低通濾波器,例如簡(jiǎn)單平滑(也稱Box Filter)或者高斯平滑等。濾波之后的圖像為qq,如下圖所示,圖像qq中第ii個(gè)像素是由圖像pp中以第ii個(gè)像素為中心的一個(gè)窗口ww中的像素確定的。
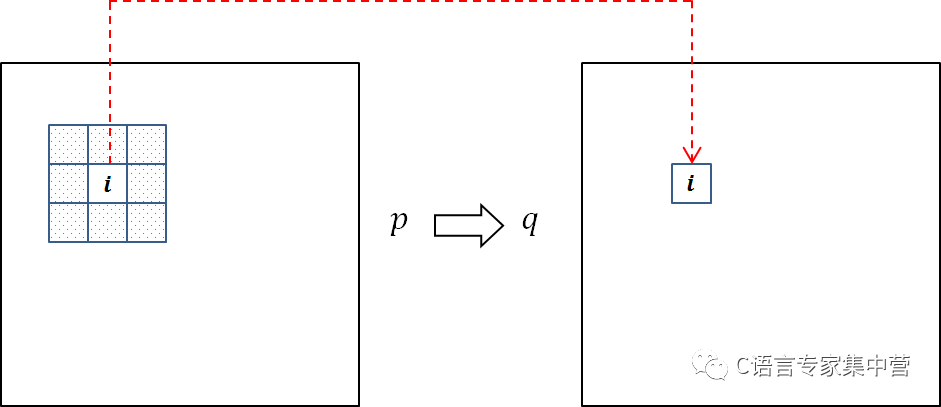
具體而言,在簡(jiǎn)單平滑中,圖像qq中第ii個(gè)像素是由圖像pp中以第ii個(gè)像素為中心的一個(gè)窗口ww中的所有像素取平均而得來(lái)的,即
qi=∑j∈wiWij?pj
其中,Wij=1/nWij=1/n,nn是窗口ww中的像素?cái)?shù)目。也就是說(shuō),在簡(jiǎn)單平滑中,以像素ii為中心的一個(gè)窗口ww中的像素具有等同的權(quán)值。但是在高斯平滑中,權(quán)值WijWij將服從二維的高斯分布,結(jié)果導(dǎo)致離像素ii更接近的像素將具有更高的權(quán)重,反之離像素ii較遠(yuǎn)的像素則具有更小的權(quán)重。
無(wú)論是簡(jiǎn)單平滑,還是高斯平滑,它們都有一個(gè)共同的弱點(diǎn),即它們都屬于各向同性濾波。我們都知道,一幅自然的圖像可以被看成是有(過(guò)渡平緩的,也就是梯度較小)區(qū)域和(過(guò)渡尖銳的,也就是梯度較大)邊緣(也包括圖像的紋理、細(xì)節(jié)等)共同組成的。噪聲是影響圖像質(zhì)量的不利因素,我們希望將其濾除。噪聲的特點(diǎn)通常是以其為中心的各個(gè)方向上梯度都較大而且相差不多。邊緣則不同,邊緣相比于區(qū)域也會(huì)出現(xiàn)梯度的越變,但是邊緣只有在其法向方向上才會(huì)出現(xiàn)較大的梯度,而在切向方向上梯度較小。
因此,對(duì)于各向同性濾波(例如簡(jiǎn)單平滑或高斯平滑)而言,它們對(duì)待噪聲和邊緣信息都采取一直的態(tài)度。結(jié)果,噪聲被磨平的同時(shí),圖像中具有重要地位的邊緣、紋理和細(xì)節(jié)也同時(shí)被抹平了。這是我們所不希望看到的。研究人員已經(jīng)提出了很多Edge-perserving的圖像降噪(平滑)算法,例如雙邊濾波、自適應(yīng)(維納)平滑濾波(請(qǐng)參見(jiàn)文獻(xiàn)【1】)、基于PM方程的各向異性濾波以及基于TV-norm的降噪算法等。本文將考慮在文獻(xiàn)【2】中提出的另外一種Edge-perserving的圖像濾波(平滑)算法——導(dǎo)向?yàn)V波(Guided Filter)。當(dāng)然,通過(guò)閱讀文獻(xiàn)【2】,我們也知道導(dǎo)向?yàn)V波的應(yīng)用不止有Edge-perserving的圖像平滑,還包括圖像去霧、圖像Matting等等。
歡迎關(guān)注白馬負(fù)金羈的博客 http://blog.csdn.net/baimafujinji,為保證公式、圖表得以正確顯示,強(qiáng)烈建議你從該地址上查看原版博文。本博客主要關(guān)注方向包括:數(shù)字圖像處理、算法設(shè)計(jì)與分析、數(shù)據(jù)結(jié)構(gòu)、機(jī)器學(xué)習(xí)、數(shù)據(jù)挖掘、統(tǒng)計(jì)分析方法、自然語(yǔ)言處理。
算法原理
導(dǎo)向?yàn)V波之所以叫這個(gè)名字,因?yàn)樵谒惴蚣苤校獙?duì)pp進(jìn)行濾波而得到qq,還得需要一個(gè)引導(dǎo)圖像II。此時(shí),濾波器的數(shù)學(xué)公式為
qi=∑j∈wiWij(I)?pj
注意,這里的Wij(I)Wij(I)就表示由引導(dǎo)圖像II來(lái)確定加權(quán)平均運(yùn)算中所采用的權(quán)值。注意,引導(dǎo)圖像可以是單獨(dú)的一幅圖像,也可以輸入的圖像pp本身。當(dāng)引導(dǎo)圖像就是pp本身的時(shí)候,導(dǎo)向?yàn)V波就變成了一個(gè)Edge-perserving的濾波器,因此可以用于圖像的平滑降噪。
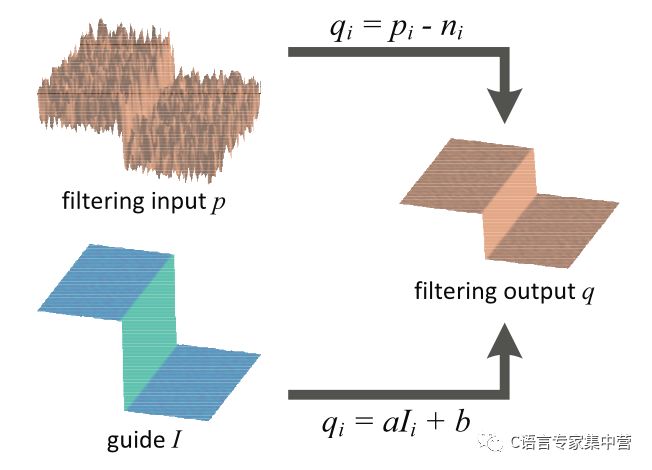
導(dǎo)向?yàn)V波濾波的示意圖如下所示(圖片來(lái)自作者原文【2】)。注意這也是導(dǎo)向?yàn)V波所依賴的一個(gè)重要假設(shè)——導(dǎo)向?yàn)V波器在導(dǎo)向圖像II和濾波輸出qq之間在一個(gè)二維窗口內(nèi)是一個(gè)局部線性模型,aa和bb是當(dāng)窗口中心位于kk時(shí)該線性函數(shù)的系數(shù),即qi=akIi+bi,?i∈wkqi=akIi+bi,?i∈wk。導(dǎo)引圖像與qq之間存在線性關(guān)系,這樣設(shè)定是因?yàn)槲覀兿M麑?dǎo)引圖像提供的是信息主要用于指示哪些是邊緣哪些是區(qū)域,所以在濾波時(shí),如果導(dǎo)引圖告訴我們這里是區(qū)域,那么就將其磨平。如果導(dǎo)引圖告訴我們這里是邊緣,這在最終的濾波結(jié)果里就要設(shè)法保留這些邊緣信息。只有當(dāng)II和qq之間是線性關(guān)系的這種引導(dǎo)關(guān)系才有意義。
你可以想象一種情況來(lái)理解這種假設(shè)。II中的甲處和乙處都是區(qū)域,而丙處是邊緣。那甲處的梯度和乙處的梯度應(yīng)該不會(huì)相差太大,例如乙處的梯度是甲處梯度的1.5倍。但是由于丙處是邊緣,所以丙處的梯度會(huì)比較大,例如可能是甲處的6倍,也就是乙處的4倍。如果II和qq之間滿足線性關(guān)系,那么甲乙丙的梯度大小和倍數(shù)關(guān)系就都不會(huì)被扭曲。否則,如果二者之間的關(guān)系是非線性的,那么可能的結(jié)果是在qq中,盡管丙處的梯度仍然大于乙處的梯度,進(jìn)而大于甲處的梯度,但是倍數(shù)關(guān)系可能會(huì)扭曲。例如,丙處的梯度是乙處的1.5倍,而是甲處的6倍(即乙處的梯度是甲處的4倍),這時(shí)你就會(huì)想象,甲處是區(qū)域,而乙處和丙處就變成了邊緣。可見(jiàn)非線性關(guān)系會(huì)使得引導(dǎo)圖像對(duì)于邊緣和區(qū)域的指示作用發(fā)生錯(cuò)亂。
現(xiàn)在已知的是II和pp,要求的是qq。而如果能求得參數(shù)aa和bb,顯然就能通過(guò)II和qq之間的線性關(guān)系來(lái)求出II。另一方面,還可以知道pp是qq受到噪聲污染而產(chǎn)生的退化圖像,假設(shè)噪聲是nn,則有qi=pi?niqi=pi?ni。根據(jù)無(wú)約束圖像復(fù)原的方法(可以參考【4】),這時(shí)可以設(shè)定最優(yōu)化目標(biāo)為min||n||min||n||,等價(jià)地有minn2minn2,即min∑i∈wk(qi?pi)2min∑i∈wk(qi?pi)2,于是有
argmin∑i∈wk(akIi+bk?pi)2
argmin∑i∈wk(akIi+bk?pi)2
于是便得到了一個(gè)最小二乘問(wèn)題。但是我們也知道普通最小二乘有時(shí)候引起一些麻煩,因此要適當(dāng)?shù)匾霊土P項(xiàng),即采用正則化的手段。原作者在處理這里時(shí)所采用的方法借鑒了從普通線性回歸改進(jìn)到嶺回歸時(shí)所采用的方法(如果你對(duì)正則化、嶺回歸、或者最小二乘法還不夠清楚,那么你可以參考文獻(xiàn)【5】),即求解下面這個(gè)最優(yōu)化(最小化)目標(biāo)所對(duì)應(yīng)的參數(shù)aa和bb。
E(ak,bk)=∑i∈wk[(akIi+bk?pi)2+?a2k]
求解上述最優(yōu)化問(wèn)題(跟最小二乘法的推導(dǎo)過(guò)程一致),便會(huì)得到:
ak=1|w|∑i∈wkIipi?μipkˉσ2k+?bk=pkˉ?akμk
其中,μkμk是II中窗口wkwk中的平均值,σ2kσk2是II中窗口wkwk中的方差,|w||w|是窗口wkwk中像素的數(shù)量,pkˉpkˉ是待濾波圖像pp在窗口wkwk中的均值,即pkˉ=1|w|∑i∈wkpipkˉ=1|w|∑i∈wkpi。
此外,在計(jì)算每個(gè)窗口的線性系數(shù)時(shí),我們可以發(fā)現(xiàn)一個(gè)像素會(huì)被多個(gè)窗口包含,也就是說(shuō),每個(gè)像素都由多個(gè)線性函數(shù)所描述。因此,如之前所說(shuō),要具體求某一點(diǎn)的輸出值時(shí),只需將所有包含該點(diǎn)的線性函數(shù)值平均即可,如下
qi=1|w|∑k:i∈wk(akIi+bk)=aiˉIi+biˉ
qi=1|w|∑k:i∈wk(akIi+bk)=aiˉIi+biˉ
其中,aiˉ=1|w|∑k∈wiakaiˉ=1|w|∑k∈wiak,biˉ=1|w|∑k∈wibkbiˉ=1|w|∑k∈wibk。
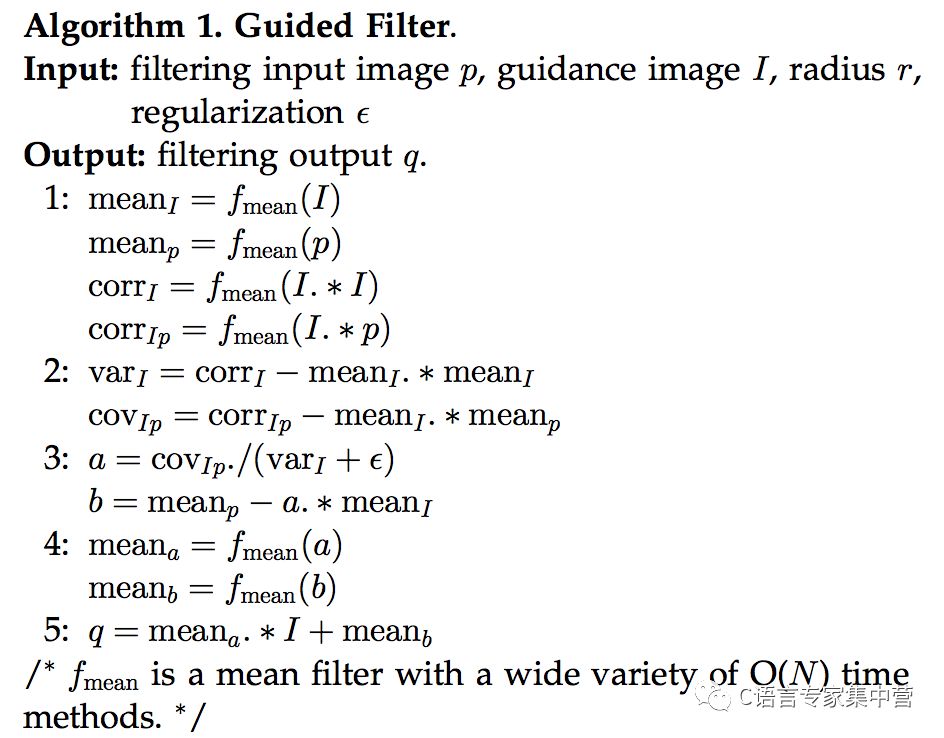
下面給出導(dǎo)向?yàn)V波算法的流程,fmeanfmean為一個(gè)窗口半徑為rr的均值濾波器(對(duì)應(yīng)的窗口大小為2r+12r+1),corr為相關(guān),var為方差,cov為協(xié)方差。
基于MATLAB的算法實(shí)現(xiàn)
下面來(lái)在MATLAB中具體實(shí)現(xiàn)一下導(dǎo)向?yàn)V波算法(代碼來(lái)自Dr. Kaiming He,使用時(shí)請(qǐng)尊重原作者權(quán)利)。
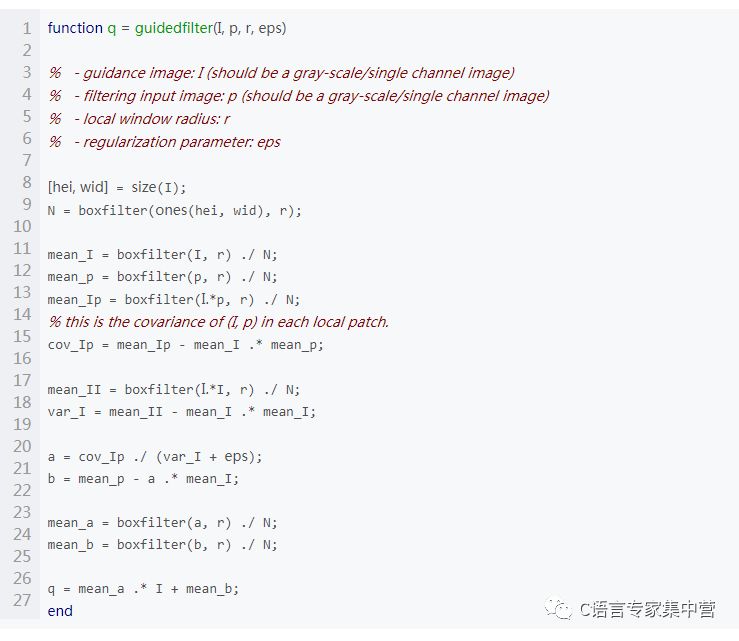
上述代碼的實(shí)現(xiàn)完全遵照上一小節(jié)最后給出的算法流程圖。這里需要略作解釋的地方是函數(shù)boxfilter,它是基于積分圖算法實(shí)現(xiàn)的Box Filter。關(guān)于Box Filter,你也可以參考文獻(xiàn)【6】以了解更多。首先來(lái)看看它到底做了些什么(因?yàn)檫@個(gè)Box Filter 和通常意義上的均值濾波并不完全一樣)。
A =
1 1 1
1 1 1
1 1 1
>> B = boxfilter(A, 1);
>> B
B =
4 6 4
6 9 6
4 6 4
從上述代碼可以看到,當(dāng)參數(shù)r=1時(shí),此時(shí)的濾波器窗口是3×33×3。將這樣大小的一個(gè)窗口扣在原矩陣中心,剛好可以覆蓋所有矩陣,此時(shí)求和為9,即把窗口里覆蓋到的值全部加和。此外當(dāng)把窗口中心挪動(dòng)到左上角的像素時(shí),因?yàn)榇翱诟采w區(qū)域里只有4個(gè)數(shù)字,所以結(jié)果為4。所以你可以看出這里的Box Filter只是做了求和處理,并沒(méi)有歸一化,所以并不是真正的均值濾波(簡(jiǎn)單平滑)。必須結(jié)合后面的一句
mean_I = boxfilter(I, r) ./ N;
1
才算是完成了均值濾波。而這整個(gè)過(guò)程就相當(dāng)于文獻(xiàn)【6】中介紹的函數(shù)imboxfilt。但是你會(huì)發(fā)現(xiàn)它們二者在執(zhí)行的時(shí)候最終的結(jié)果(主要是位于圖像四周邊緣的數(shù)值)會(huì)有細(xì)微的差異。這是因?yàn)镸ATLAB中的imboxfilt函數(shù)在處理位于圖像四周邊緣的像素時(shí),需要虛擬地為原圖像補(bǔ)齊濾波窗口覆蓋但是沒(méi)有值的區(qū)域。
下面給出上述boxfilter函數(shù)的實(shí)現(xiàn)代碼。
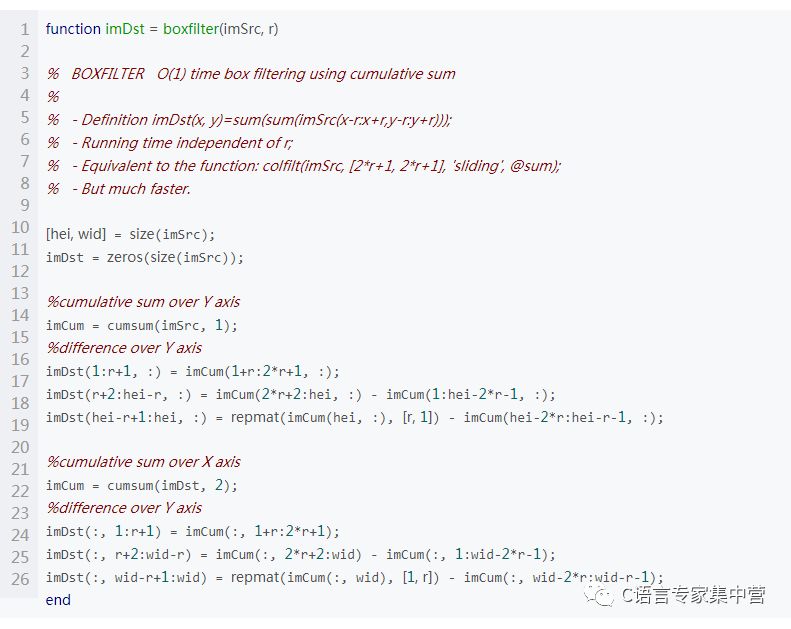
上述代碼基于積分圖實(shí)現(xiàn),如果你對(duì)積分圖不是很了解,可以參考其他文獻(xiàn),這里不再贅述。
下面我們來(lái)實(shí)驗(yàn)一下上述導(dǎo)引濾波用于edge-perserving的平滑濾波效果。
I = double(imread('cat.bmp')) / 255;
p = I;
r = 4; % try r=2, 4, or 8
eps = 0.2^2; % try eps=0.1^2, 0.2^2, 0.4^2
O = guidedfilter(I, p, r, eps);
subplot(121), imshow(I);
subplot(122), imshow(O);
執(zhí)行上述代碼,結(jié)果如下所示。可見(jiàn)效果還是很不錯(cuò)的。但是我們可以來(lái)做一下事后分析,看看導(dǎo)向?yàn)V波是如果實(shí)現(xiàn)edge-perserving的平滑濾波效果的。當(dāng)I=pI=p時(shí),導(dǎo)向?yàn)V波就變成了邊緣保持的濾波操作,此時(shí)原來(lái)求出的aa和bb的表達(dá)式就變成了:
ak=σ2kσ2k+?bk=(1?ak)μk
ak=σk2σk2+?bk=(1?ak)μk
考慮兩種情況:
情況1:高方差區(qū)域,即表示圖像II在窗口wkwk中變化比較大,此時(shí)我們有σ2k>>?σk2>>?,于是有ak≈1ak≈1和bk≈0bk≈0。
情況2:平滑區(qū)域(方差不大),即圖像II在窗口wkwk中基本保持固定,此時(shí)有σ2k<
也就是說(shuō)在方差比較大的區(qū)域,保持值不變,在平滑區(qū)域,使用臨近像素平均(也就退化為普通均值濾波)。(這個(gè)思想跟文獻(xiàn)【1】里設(shè)計(jì)的自適應(yīng)降噪濾波器有異曲同工之妙,當(dāng)然也不完全相同!)
上面的給出的是對(duì)灰度圖像進(jìn)行導(dǎo)向?yàn)V波的代碼。你可能會(huì)好奇彩色圖像該如何使用導(dǎo)向?yàn)V波。一個(gè)比較直接的方法就是將引導(dǎo)濾波分別應(yīng)用到RGB三個(gè)顏色通道中,然后在組合成結(jié)果圖像。更多細(xì)節(jié)可以參考作者原文。不僅如此,在本文開始我們也談到,導(dǎo)向?yàn)V波不僅可以應(yīng)用與圖像平滑,還可以用于圖像去霧、圖像Matting等多個(gè)領(lǐng)域,限于篇幅我們無(wú)法一一詳述,有興趣的讀者可以參考作者原文以了解導(dǎo)向?yàn)V波的其他應(yīng)用。
最后,需要說(shuō)明的是在新版的MATLAB中(R2014及以后),已經(jīng)內(nèi)置了用于導(dǎo)向?yàn)V波的函數(shù)imguidedfilter(而這個(gè)函數(shù)實(shí)現(xiàn)的其實(shí)是Fast Guided Filter),也就是說(shuō)在實(shí)際開發(fā)中我們已經(jīng)不再需要編寫上面那樣的代碼,而是只要簡(jiǎn)單調(diào)用MATLAB的內(nèi)置函數(shù)就可以了。
-
濾波器
+關(guān)注
關(guān)注
161文章
7795瀏覽量
177996 -
噪聲
+關(guān)注
關(guān)注
13文章
1120瀏覽量
47400 -
圖像
+關(guān)注
關(guān)注
2文章
1083瀏覽量
40449
原文標(biāo)題:導(dǎo)向?yàn)V波(Guided Filter)的解析與實(shí)現(xiàn)
文章出處:【微信號(hào):C_Expert,微信公眾號(hào):C語(yǔ)言專家集中營(yíng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
rf filter 3.30 濾波器設(shè)計(jì)軟件
如何實(shí)現(xiàn)低和使用濾波器2.20高通濾波組件?
Filter-WDM器件最全解析
如何使用Filter_solutions軟件設(shè)計(jì)低通濾波器
數(shù)字濾波器結(jié)構(gòu),DF(Digital Filter)
簡(jiǎn)單低通濾波器:Simple Low-pass Filter





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論