 步進和閉環步進及交流伺服電機產品的特點及對比
步進和閉環步進及交流伺服電機產品的特點及對比
本文將介紹步進、閉環步進、交流伺服產品的特點及對比,幫助工程師選擇最適合自動化設備應用要求的產品。
1、步進、閉環、交流伺服產品對比
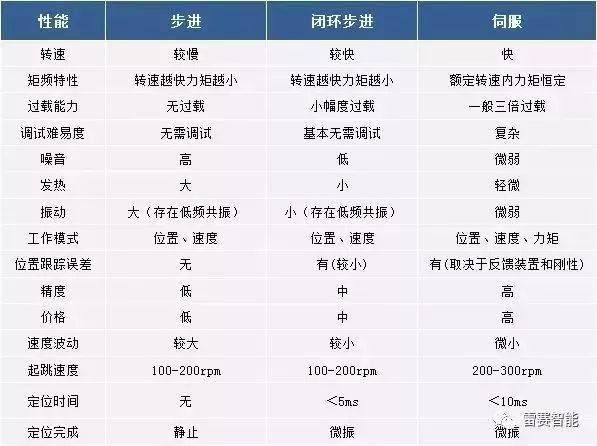
表一:步進、閉環、伺服產品性能對比表
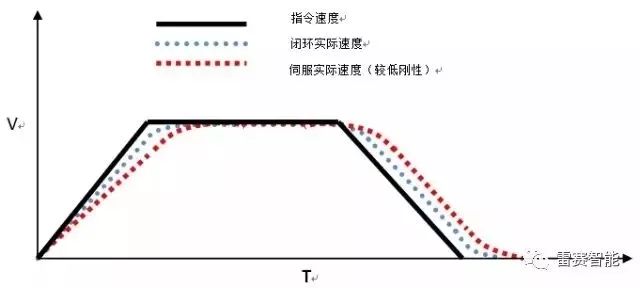
圖一:閉環步進和伺服位置跟蹤誤差示意圖
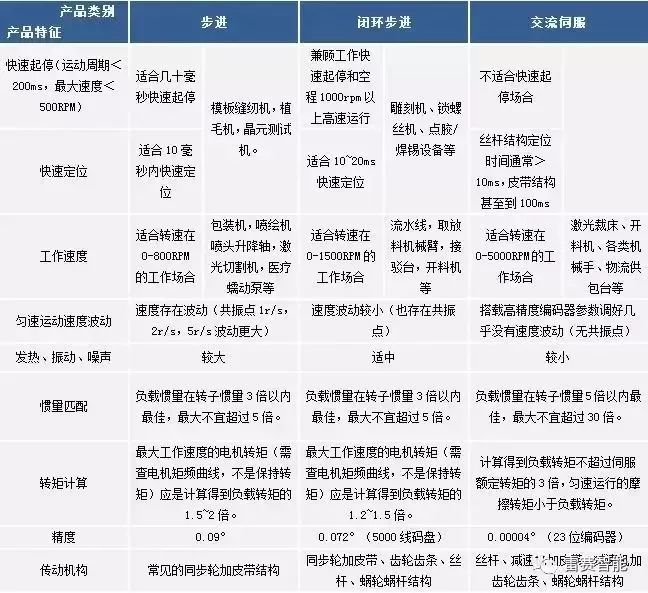
表二:步進、閉環步進、伺服選型實例一覽表
2、步進電機
步進電機是一種將數字脈沖信號轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度即步距角。
圖二:雷賽CM系列步進電機
2.1 步進電機參數介紹
保持轉矩:步進電機繞組通額定電流但沒有轉動時,定子鎖住轉子的力矩,一般在轉速小于1r/s時步進電機輸出力矩近似于保持轉矩。
矩頻曲線:描述電機轉矩和轉速關系的曲線。

圖三:雷賽相同轉矩57機座開環步進和閉環電機轉矩對比
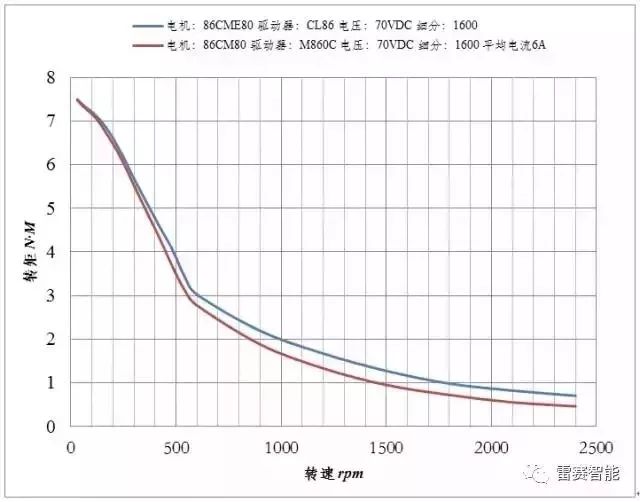
圖四:相同轉矩86機座開環步進和閉環電機轉矩對比
備注:步進電機電壓平衡方程式:U=E+IR,供電電壓U,電機反電動勢E,繞組電流I,繞組電阻R。電機轉速越高反電動勢越大,能流入電機繞組的電流越小,導致電機力矩越小。
轉子慣量:步進電機轉子旋轉慣量,負載慣量最大不宜超過電機轉子慣量5倍。
步距角:整步下一個脈沖信號步進電機轉過的角度。一般兩相混合式步進電機步距角是1.8°,三相混合步進電機步距角是1.2°,五相混合步進電機步距角是0.72°。
2.2 步進電機結構
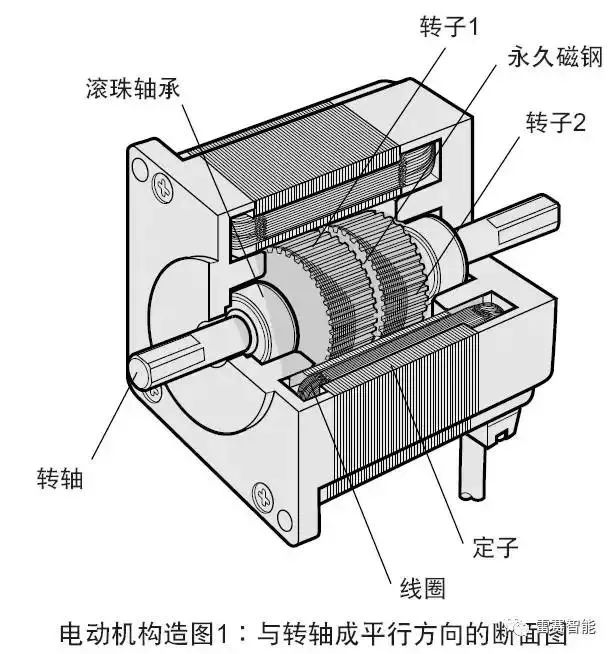
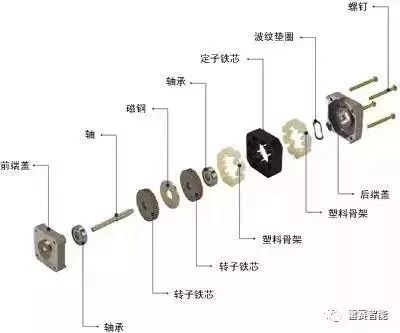
圖五:步進電機內部結構
2.3步進電機接線方式
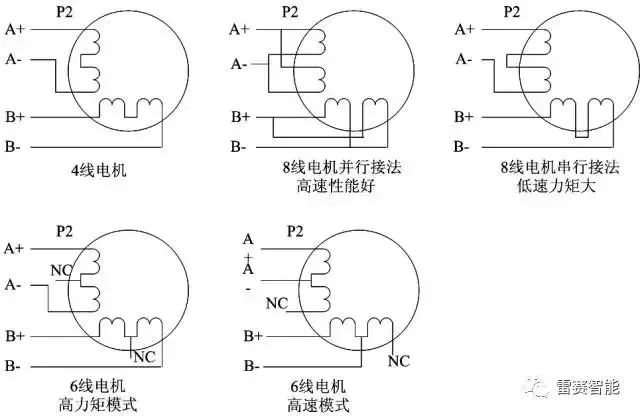
圖六:步進電機接線方式
a) 四線電機:輸出電流設成等于或略小于電機額定電流值;
b) 六線電機高力矩模式:輸出電流設成電機單極性接法額定電流的50%;
c) 六線電機高速模式:輸出電流設成電機單極性接法額定電流的100% ;
d) 八線電機并聯接法:輸出電流可設成電機單極性接法額定電流的140% ;
e) 八線電機串聯接法:輸出電流可設成電機單極性接法額定電流的70%。
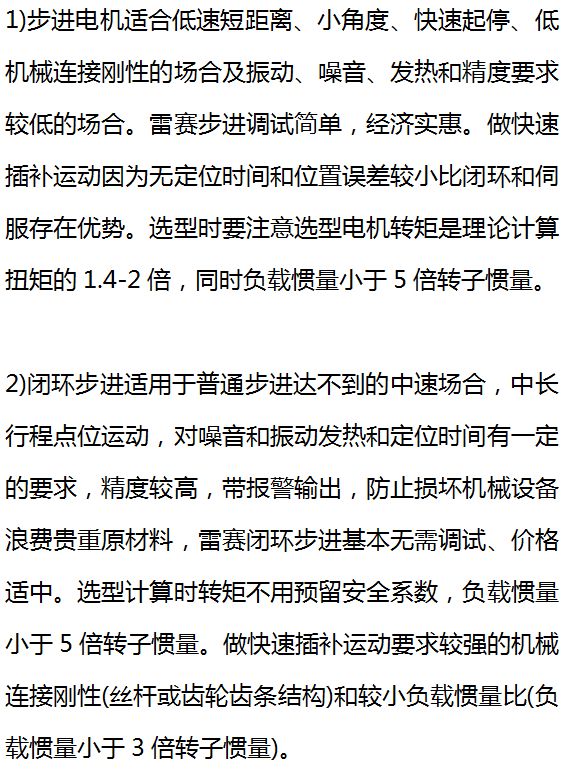
2.4步進電機特點
低速力矩大,轉矩會隨著轉速的提高而降低,一般在800rpm以上力矩下降加快,精度是步距角的3%~5%,整圈沒有累積誤差,兩相混合步進電機精度為0.18°;步進電機采用開環控制,系統響應性快,無過沖和整定時間,停止時電機軸無微振動。步進電機存在低頻共振,第一個共振點的轉速大約是1r/s。步進電機是恒電流控制,發熱和噪音較大,同時沒有過載能力,電機力不夠就會堵轉,故選型時應預留1.4-2倍安全系數。步進電機及驅動器使用便捷無需復雜的調試就能使用。
3、閉環步進
本體是步進電機,增加位置反饋器件(光電編碼器或磁編碼器),運用類似伺服電機的控制方法形成的閉環控制系統。
圖七:雷賽CL系列閉環步進的3D和實物圖
3.1閉環步進重要參數
編碼器精度:電機轉一圈編碼器反饋到驅動器的脈沖個數,影響閉環步進精度。閉環步進常規編碼器線數有1000線、2500線、5000線。以5000線為例,它的分辨率為360°/(4*5000)=0.018° ,精度高于開環控制的步進電機。
矩頻曲線:描述電機轉矩和轉速關系的曲線。
位置誤差:指令位置和編碼器反饋位置之間的差值。位置誤差過大驅動器會報超差報警。
3.2閉環步進原理框圖
圖八:閉環步進原理框圖
3.3 閉環步進的特點
閉環步進根據負載大小自動調節繞組電流大小,發熱和振動小于開環步進,有編碼器反饋所以精度高于普通步進電機,電機響應比開環步進慢,運行過程中存在位置誤差,誤差會在指令停止后數毫秒逐漸降低。高速力矩比開環步進大,常見應用在0-1500rpm場合。做插補機械剛性不足(皮帶結構)且負載慣量較大時,會因為位置跟蹤誤差大導致偏位。小部分閉環步進需要簡單的調試才能使用。
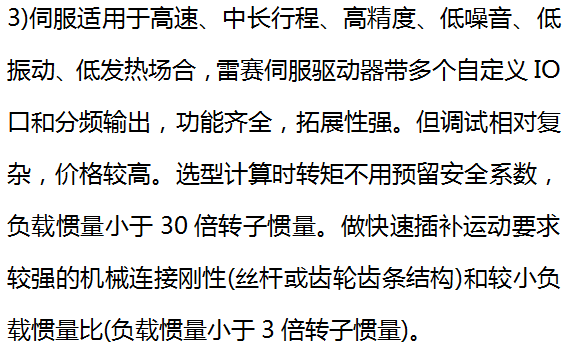
4、交流伺服
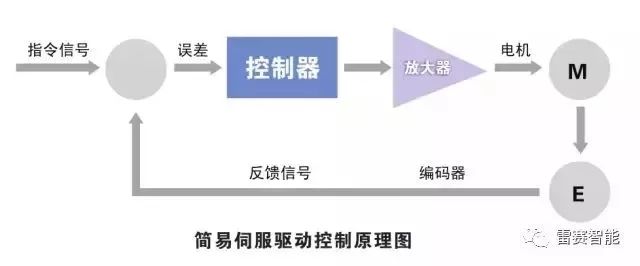
伺服系統是使物體的位置、方位、狀態等輸出被控量能夠跟隨輸入目標(或給定值)的任意變化的自動控制系統。位置模式下伺服電機靠脈沖來定位,伺服電機接收到1個脈沖,就會旋轉1個脈沖對應的角度。同時伺服電機編碼器具備反饋功能,伺服電機每旋轉一個角度,編碼器都會發出對應數量的反饋脈沖,反饋脈沖和伺服驅動器接收的脈沖形成閉環控制,這樣伺服驅動器就能夠很精確的控制電機的轉動,從而實現精確的定位。
圖九:雷賽L5系列交流伺服產品實物圖
4.1伺服電機重要參數
額定轉速:電動機輸出最大連續轉矩(額定轉矩)、以額定功率運行時的轉速。
額定轉矩:是指電機能夠連續安全輸出的轉矩大小,在環境溫度為25 °C時,在該轉矩下連續運行,電動機繞組溫度和驅動器功率器件溫度不會超過最高允許溫度,電動機或驅動器不會損壞。
最大轉矩:電動機所能輸出的最大轉矩。在最大轉矩下短時工作不會引起電機損壞或性能不可恢復。
最大電流:伺服短時間工作允許通過的最大電流,一般為額定電流的3倍。
最高轉速:電機短時間工作的最高轉速,最高轉速電機力矩下降,電機發熱量更大。
轉子慣量J:伺服電機轉子旋轉慣量單位kgcm^2,一般負載慣量最大不超過20倍電機轉子慣量。
編碼器線數:電機轉一圈編碼器反饋到驅動器的脈沖個數,影響閉環步進精度。伺服常規編碼器線數有2500線、5000線、17位和23位編碼器。17位編碼器精度為0.0027°高于常規的步進和閉環步進。
伺服電機兩個重要公式:T=Kt*I,P=n(單位換算成弧度/秒)*T。
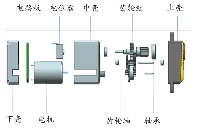
4.2 伺服電機結構
圖十:伺服電機內部結構
4.3 伺服三環控制原理框圖
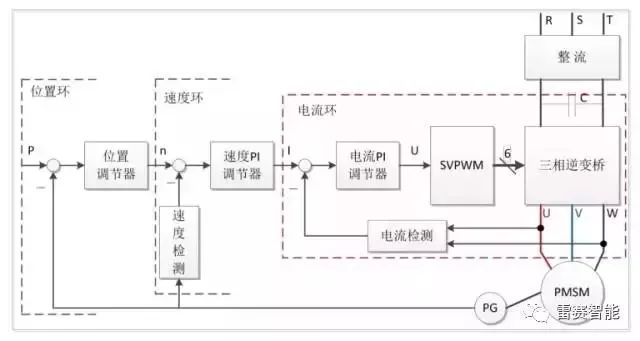
圖十一:伺服三環控制原理框圖
4.4伺服電機的特點
交流伺服具備額定轉速下力矩恒定的特點,常見200W,400W低中慣量交流伺服額定轉速為3000rpm,最高轉速5000rpm,轉速高。力矩與電流成正比,可以工作在力矩模式,例如鎖螺絲,壓端子等需要恒定力矩的場合。
交流伺服工作噪音振動極小,發熱低。同體積下電機慣量轉子慣量小,400W伺服慣量僅相當于57基座2NM步進電機的轉子慣量。
伺服具備短時間過載能力,選型時需考慮加減速時電機過載倍數。
伺服采用閉環控制,同閉環步進一樣存在位置跟蹤誤差,雷賽伺服具備軌跡跟蹤和共振抑制功能以提高伺服剛性來降低位置誤差,和定位時間,以達到更好的插補效果。伺服需要調試才能使用。
5、三種電機驅動方案對比總結
-
編碼器
+關注
關注
45文章
3638瀏覽量
134427 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443 -
伺服電機
+關注
關注
85文章
2044瀏覽量
57810
原文標題:電機驅動方案對比:步進、閉環、交流伺服
文章出處:【微信號:wwygzxcpj,微信公眾號:電機技術及應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論