 雷洪鈞:汽車自動駕駛技術與實例的研究(上)
雷洪鈞:汽車自動駕駛技術與實例的研究(上)
汽車自動駕駛系統(Motor Vehicle Auto Driving System),是一種通過車載電腦系統實現無人駕駛的智能汽車系統,又稱無人駕駛汽車、電腦駕駛汽車、或輪式移動機器人,還有稱自動駕駛汽車(Autonomous vehicles;Self-pilotingautomobile)的。汽車自動駕駛系統,其結構,一般分為:感知系統、決策系統、執行系統3個部分。
一、汽車自動駕駛技術基礎知識
1.0感知系統
感知系統,是用攝像頭(眼睛)看前面的路,還在用雷達(耳朵)聽車周圍(前、后、左右)的車、人及實體的,甚至會用信息識別單元(大腦)在分析、判斷。感知系統由三部分組成,傳感器、高精度地圖、信息識別單元等。
(1)傳感器,主要有光學攝像頭和雷達,相當人的眼睛和耳朵,其主要功能是車輛收集周圍的“即時信息”。為無人駕駛車輛提供完整、準確的環境數據,長用的傳感設備包括:
(a)光學攝像頭;(b)光學雷達(LiDAR);(c)微波雷達;(d)導航系統等。
(2)高精度地圖,提供的環境信息中相對固定、更新周期較長的信息,比如車道標記、路緣、交通信號燈等;
(3)信息識別單元,對傳感器接收到信息,利用深度學習等手段,對信息進行識別,目前對外界事物進行準確識別基本算法和技術有:誤差反向傳播算法和先進的數字攝像技術。
1.1攝像頭是眾多預警、識別類ADAS功能的基礎
1)攝像頭的主要應用
車載攝像頭對于智能駕駛是必不可少設備,主要應用于:車道偏離預警(LDW)、車道保持輔助(LKA)、前向碰撞預警(FCW) 行人碰撞預警(PCW)、全景泊車(SVP)、駕駛員疲勞預警、交通標志識別(TSR)。
2)光學攝像頭優缺點
光學攝像頭是最常用的車載傳感器,同時價格最便宜,是場景解讀的絕佳工具,優點是能分辨顏色,缺點是:
(a)對光線過于敏感,比如過暗或過強的光線以及二者之間的快速切變,都足以影響它的成像的效果,尤其是車輛駛入和駛出隧道,更為明顯;
(b)沒有立體視覺效果時,缺乏“深度“,無法判斷物體和相機(車輛))間的距離。
3)光學攝像頭,按安裝位置不同的分類車載攝像頭布置位置(見圖1)主要包括內視攝像頭、后視攝像頭、前置攝像頭、側視攝像頭、環視攝像頭等。韓國最大的車載攝像頭制造商Mcnex公司預測,當攝像頭成功取代側視鏡時,汽車上的攝像頭數量將達到12個。
圖1 車載攝像頭布置位置
(a)其中前視攝像頭使用頻率最高,一般為廣角鏡頭,安裝在車內前擋風玻璃上較高的位置或者后視鏡上,以實現較遠的有效距離;
(b)單一攝像頭可實現多重功能,如行車記錄、車道偏離預警、前向碰撞預警、行人識別等;
(c)單一前視攝像頭,通過算法開發優化,可以實現多重功能,通過算法整合,實現更多ADAS功能;
(d)單車多攝像頭將成為趨勢。要實現全套ADAS功能,單車需配備至少5個攝像頭。 特斯拉Autopilot 2.0的硬件系統中就包含8個攝像頭。
4)攝像頭的感光元件(CMOS)攝像頭的感光元件,分CMOS和CCD兩種,在百萬像素內,兩者的感光效果差距是不大。CCD價格相對昂貴,而CMOS具有節能、成本低廉等特點,CMOS,是車載車載攝像頭目前首選的感光元件。
5)車載攝像頭的特殊要求車載攝像頭,工藝與技術門檻較高,除了對模組和封裝要求較高,且對穩定性以及規格上也有特殊要求:
(a)對車輛后方與側面進行攝影的模塊,能夠抑制低照度攝影時的噪聲,即使是在晚上,也必須能很容易地捕捉到影像;
(b)車載攝像頭模塊,水平視角擴大為25°~135°,要實現廣角以及影像周邊部位的高解析度(注意:手機中攝像頭模塊的水平視角大多為55°左);
(c)車載攝像頭模塊的機身,要求抑制電磁干擾、機械強度好、有一點耐高溫性;
(d)車載攝像頭模組,是關乎行車安全的組件,還必須能在供電系統暫時斷電時可靠地工作。
1.2圖像信號處理器ISP及核心算法
1)圖像信號處理器ISP
ISP是對前端圖像傳感器輸出信號處理的單元,其架構為邏輯部分以及運營在其上的firmware(固件)。ISP有獨立和集成兩種方案,獨立ISP芯片性能強大,在短期內仍是主流,但成本較高。CMOS傳感器集成(內置)ISP的集成產品(見圖3),成本低、面積小、功耗低、但能夠完成的算法相對簡單,處理能力較弱,后期在處理能力上有望實現新突破。
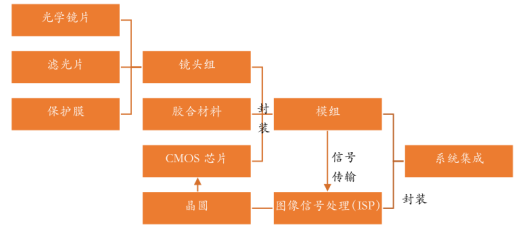
圖3 圖像信號處理器ISP
其功能包括3A、壞點校正、去燥、強光抑制、背光補償、色彩增強、鏡頭陰影校正等處理。
2)圖像信號核心算法芯片
目前,主流算法芯片方案主要包括:
(a)嵌入式方案,如ARM、DSP、ASIC、MCU、SOC、FPGA、GPU等,其中ARM、DSP、ASIC、MCU、SOC是軟件編程的,難以滿足ADAS視覺系統中對響應速度的要求;
(b)直接編程處理方案,如現場可編程門陣列(FPGA)是可編程器件,速度較高。FPGA編程和優化都是直接在硬件層面進行的,能耗會低很多,在平衡算法和處理速度,尤其是用于前裝并且算法穩定時,FPGA被視為一個推薦方案。
目前對核心算法芯片的要求:
(a)芯片,必須達到車規級的標準,即道路車輛功能安全標準中的ASIL—B甚至ASIL—D級別;
(b)高寬帶,特別是多傳感器融合的芯片,需要更高的芯片頻率,以及異構設計;
(c)硬件的深度學習設計,滿足人工智能計算模型要求;
(d)較低的成本和能耗,以實現在智能汽車領域的推廣。
3)深度學習法
(a)深度學習,其概念源于人工神經網絡的研究,是機器學習中一種基于對數據進行表征學習的方法。
(b)深度學習,含多隱層的多層感知器就是一種深度學習結構。觀測值(例如一幅圖像)可以使用多種方式來表示,如每個像素強度值的向量,或者更抽象地表示成一系列邊、特定形狀的區域等;
(c)深度學習,通過組合低層特征形成更加抽象的高層表示屬性類別或特征,以發現數據的分布式特征表示;
(d)深度學習的好處是用非監督式或半監督式的特征學習和分層特征提取高效算法來替代手工獲取特征。
(e)卷積神經網絡是第一個真正多層結構學習算法,它利用空間相對關系減少參數數目以提高訓練性能;
(f)深度機器學習方法,也有監督學習與無監督學習之分.不同的學習框架下建立的學習模型很是不同。例如,卷積神經網絡(Convolutional neural networks,簡稱CNNs)就是一種深度的監督學習下的機器學習模型,而深度置信網(Deep Belief Nets,簡稱DBNs)就是一種無監督學習下的機器學習模型。
1.3)現場可編程門陣列(FPGA)板卡(見圖4)
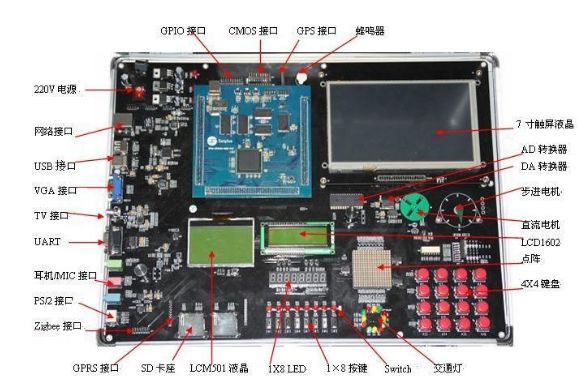
圖4 現場可編程門陣列(FPGA)板卡
FPGA擁有大量的寄存器資源使其能非常好的應對復雜的高速控制應用和數據處理,小到MP3,大到地球衛星,飛船都有其用武之地。PLD(可編程邏輯器件,Programmable Logic Device)的發展經歷了:
(a)可編程只讀存儲器PROM (Programmable Read only Memory);(b)可編程邏輯陣列器件PLA ( Programmable Logic Array);(c)可編程陣列邏輯PAL (Programmable Array Logic);通用陣列邏輯GAL ( Generic Array Logic);(d)復雜可編程邏輯器件CPLD(Complex Programmable Logic Device);(e)現場可編程邏輯陣列FPGA(Field Programmable Gate Array)階段。
現場可編程門陣列與傳統邏輯電路和門陣列(如PAL,GAL及CPLD器件)相比,FPGA具有不同的結構。FPGA利用小型查找表(16&TImes;1RAM)來實現組合邏輯,每個查找表連接到一個D觸發器的輸入端,觸發器再來驅動其他邏輯電路或驅動I/O,由此構成了既可實現組合邏輯功能又可實現時序邏輯功能的基本邏輯單元模塊,這些模塊間利用金屬連線互相連接或連接到I/O模塊。
1.4 全景(360°)影像系統圖像拼接技術
360°全景影像系統圖像拼接技術是在車身周圍安裝多個超廣角攝像頭,同時采集車輛四周的影像,經過圖像處理單元矯正、拼接之后,能形成一幅車身四周的全景俯視圖(見圖2)。在屏幕上,可以直觀地,看到車輛所處的位置以及車輛周報的障礙物,從容操縱泊車入位或通過復雜路面。
圖5 360°全景影像系統圖像
1.5毫米波雷達能夠監測到大范圍內車輛的運行情況
微波雷達的原理和激光雷達類似,但它發射的是無線電波,而不是激光。微波雷達價格低、體積小,但精度不及激光雷達。毫米波的波長介于厘米波和光波之間, 毫米波兼有微波制導和光電制導的優點:
(a)它較大的波長可以穿透霧、煙、灰塵等,激光雷達難以穿透的障礙,較好免疫惡劣天氣;
(b)同厘米波導引頭相比,毫米波導引頭具 有體積小、質量輕和空間分辨率高的特點;
(c)與紅外、激光等光學導引頭相比,毫米波導引頭穿透霧、煙、灰塵的能力強,傳輸距離遠,具有全天候全天時的特點;
(d)毫米波雷達,性能穩定,不受目標物體形狀、顏色等干擾。能很好的彌補了如紅外、激光、超聲波、 攝像頭等其他傳感器在車載應用中所不具備的使用場景。
這些特性使得毫米波雷達能夠監測到大范圍內車輛的運行情況,同時對于前方車輛的速度、加速度、距離等信息的探測也更加精準,因此是自適應巡航(ACC)、自動緊急剎車(AEB) 的首選傳感器。目前24GHz毫米波雷達系統是市場的主力產品,77GHz毫米波雷達系統,是未來的趨勢。
圖6 毫米波雷達產品外形及結構
毫米波雷達(見圖6)的探測距離一 般在150m-250m之間,有的高性能毫米波雷達探測距離甚至能達到300m,可以滿足汽車在高速運動時探測較大范圍的需求。毫米波雷達應用于汽車的防撞系統,其基本原理(見圖7):車載毫米波雷達利用電磁波發射后遇到障礙物反射的回波對其不斷檢測,計算出與前方或后方障礙物的相對速度和距離。
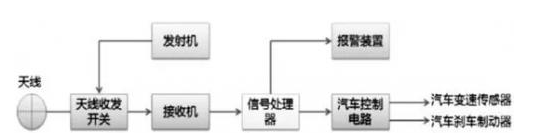
圖7 汽車防撞雷達原理框圖
當車輛行進中時,發射機產生的雷達窄波束向前發射調頻連續波(FMCW)信號,當發射信號遇到目標時被反射回來,并為同一天線接收,經混頻放大處理后:
(a)根據其差拍信號時間差,來表示雷達與目標的距離;
(b)根據差頻信號相差與相對速度關系,計算出目標對雷達的相對速度及危險時間;
(c)從而通過防撞系統對車輛做出預判警告。
1.6激光雷達是將成為一種不可替代的傳感器
激光雷達(見圖8),即利用激光來進行探測和測量。其精度有優良。其原理是向周圍發射脈沖激光,遇到物體后反射回來,通過來回的時間差,計算出距離,從而對周圍環境建立起三維模型。(1)激光雷達具有非常優越的性能(a)激光雷達分辨率高,并且探測距離很長,在200米以上;(b)激光的波長短,所以可以探測到非常微小的目標;(c)激光雷達可以獲得極高的角度、距離和速度分辨率,可以利用多普勒成像技術獲得非常清晰的圖像;(d)激光直線傳播、方向性好、光束非常窄,彌散性非常低,探測精度高;(e)激光抗有源干擾能力強。自然界中能對激光雷達起干擾作用的信號源不多。
(2)車用激光雷達類別
圖8 不同規格車用激光雷達產品
激光雷達是一種通過發射激光束探測目標的位置、速度等特征量的雷達系統。激光波段位于0.5μm-10μm,以光電探測器為接收器件。按雷達頻段分,可分為超視距雷達、微波雷達、毫米波雷達以及激光雷達等。
(3)激光雷達的空間建模
三維激光雷達一般安裝在車頂, 可以高速旋轉,主要功能:(a)以獲得周圍空間的點云數據,從而即時繪制出車輛周邊的三維空間地圖;(b)可以測量出周邊其他車輛在,三個方向上的距離、速度、加速度、角速度等信息;(c)結合 GPS 地圖計算出車輛的位置;以上龐大豐富的數據信息傳輸給 ECU,經分析處理后,可以供車輛快速做出判斷。
(4)車用激光雷達方案
激光雷達盡量要被做成小體積直接嵌入車身,意味著要將機械旋轉部件做到最小,有許多廠家改為固定激光光源,通過內部玻璃片旋轉的方式改變激光光束方向,實現多角度檢測的需要。
車用激光雷達方案有以地圖為中心和以汽車為中心兩者方案:
(a)以地圖為中心:激光雷達可以繪制高精度地圖,以Google和百度等互聯網企業的無人駕駛汽車是以地圖為中心;(b)以汽車為中心:對整車企而言,要一款專為汽車量身定制的激光雷達產品。不同的汽車,對激光雷達產品有自己的要求。
1.7高精度地圖系統
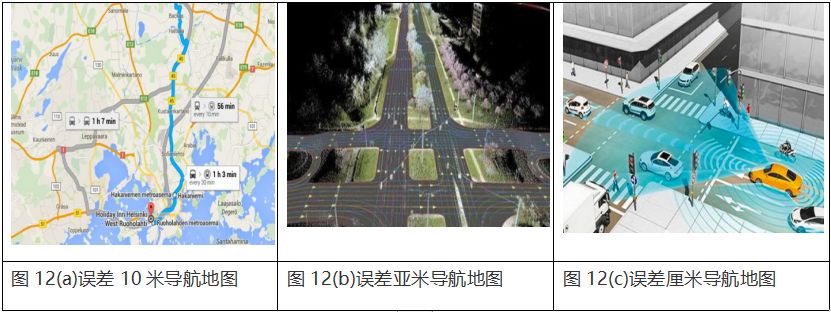
1)高精度地圖是面向自動駕駛汽車導航地圖(a)是針對人工駕駛汽車的,高精度地圖(見圖9 (b))是面向自動駕駛汽車,實時性、復雜路況和高可靠性等車規級附加的要求的,其精度已經實現厘米級的誤。
目前高精度地圖有輔助環境感知功能:在高精地圖上標注詳細道路信息,輔助汽車在感知過程中進行驗證。比如車輛傳感器感知到前方道路上的坑洼,可以在跟高精地圖中數據對比,如果地圖中也標記了同樣的坑洼,就能起到驗證判斷的作用。
2)高精度地圖組成
高精地圖分為兩個層級(見圖10),最底層的是靜態高精地圖,上層是動態高精地圖,含有:
(a)車道模型:即引導車輛從A地開往B地的道路規劃,包括車道上詳細信息的和連接關系。(b)道路部件(Object):包括交通標志、指示牌、龍門架、路桿等路側及路面的各類物體,當車輛傳感器探測到這些道路物體,然后再對比地圖,便可得知車輛的精確位置。(c)道路屬性:包括道路的曲率、航向、坡度以及橫坡,幫助車輛執行轉向、加減速。(d)多傳感器定位的特征圖層。
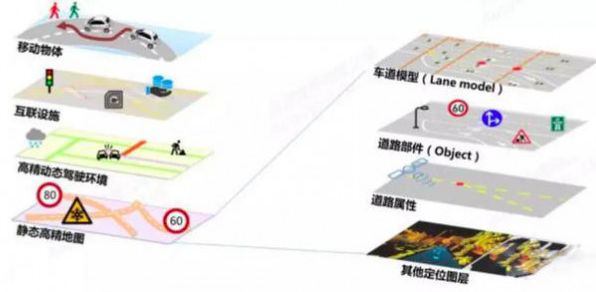
圖10 高精度地圖組成
動態高精地圖:由于路網每天都有變化,如道路標識線磨損及重漆、交通標示改變等、如道路擁堵情況、施工情況、是否有交通事故、交通管制情況、天氣情況等動態交通信息。這些變化需要及時反映在高精地圖上,以確保無人車行駛安全。
4)導航地圖與高精地圖的主要區別
主要體現在使用者不同、用途不同、所屬系統不同、要素和屬性不同。
(a)導航地圖的使用者是人導航地圖用于人工導航、搜索,在車內屬于車載信息娛樂系統,帶顯示屏,要素跟屬性方面,導航地圖僅包含簡單道路線條、信息點(POI)、行政區劃邊界,基礎道路導航功能,包括由A地到B地的路徑規劃,車輛和道路的定位匹配。(b)高精地圖的使用者是計算機高精地圖屬于車載安全系統,包含曲率、坡度、航向、橫坡等數學屬性(見圖11)。用于高精度定位、輔助環境感知、規劃與決策,包含詳細道路模型,包括車道模型、道路部件、道路屬性和其他的定位圖層。具備輔助完成實現高精度的定位位置功能、道路級和車道級的規劃能力、以及車道級的引導能力。
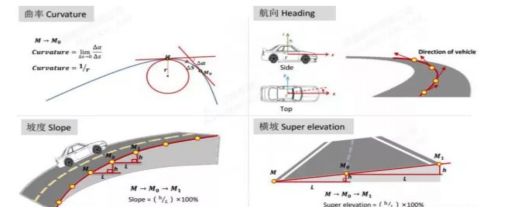
圖11 道路數學屬性
5)高精地圖等級劃分
高精地圖精度,分兩個維度:一是地圖本身的精度,二是高精地圖對自動駕駛的汽車實時精準定位的精度,業內對產品的要求是都要控制在10cm以內。從數據的精確度和豐富度來講,高精地圖等級設定為三個等級,分別是:
(a)L2級(ADAS用的):業內稱為ADAS Vector Map;(b)L3級高精地圖:也稱為Vector Map、Intensity Map、Objects Map;(c)L4級的高精地圖:業內稱為Occupancy Map。
對于高精地圖來說,必須做到實時更新。要想實現 L3 級別和更高的自動駕駛,必須要使用到高精地圖。
目前高精度地圖采集方案均基于移動測量技術,是對于路面信息,進行精度更高的掃描和處理后生成的地圖。通過32線/16線車載激光雷達+相機采集道路數據,AI算法+三維人機交互軟件完成地圖繪制,其精度均達到5-10厘米的誤差。
5)ADAS(主動安全場景)的地圖
ADAS(主動安全場景)的地圖是介于普通的導航電子地圖和高精度地圖之間的。ADAS 對地圖的精度要求不是很高,在普通的導航電子地圖精度上,需要追加一些 ADAS 屬性,比如曲率、坡度、Heading Angle、更加精確的車道數量等屬性,制作成本相對不高。
(a)依據目前車速、汽車剎車速度及司機反映時間,有一個自適應速度建議,ASR ( Adaptive Speed Recommendation ) 功能;(b)會提前 50-300 米提醒用戶減速;(c)在有轉彎 ( curve ) 的路段,ASR 會綜合路寬、車道數目、整個路況等因素計算合理的汽車速度,提醒用戶減速。
1.5高精度定位
高精度定位:把自動駕駛汽車上傳感器感知到的環境信息與高精地圖對比,得到車輛在地圖中的精確位置。高精地度起到了高精度定位、輔助環境感知、規劃與決策等功能。
自動駕駛通過人工智能算法決策做出車道及路徑規劃,給制動、轉向、加速等控制器下達指令,控制車輛開往目的地。
(1)高精度定位系統構成高精度定位系統由移動站和局部基站構成(見圖10)。移動站安裝于車輛,局部基站安裝于樓頂。
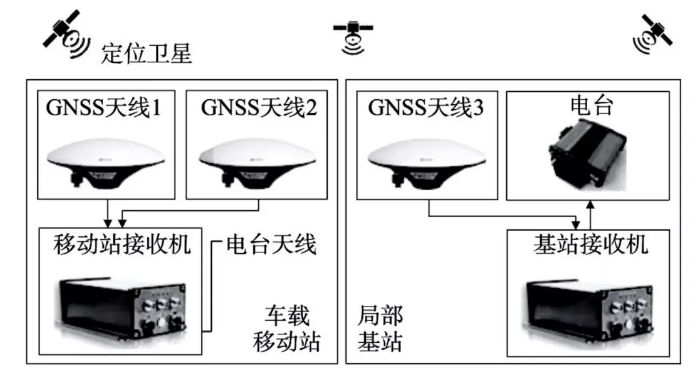
圖13 高精度定位系統
(a)局部基站是整個定位系統的基準框架,長期連續跟蹤觀測衛星信號,通過無線數傳電臺實時播發基準站差分改正信息,并實時為各車載移動站提供高精度的載波相位差分(Real-time Kinematic,RTK)數據及起算坐標。(b)移動站接收來自空間衛星信號及局部基站數據,進行 RTK 實時解算,求得厘米級的高精度實時坐標。
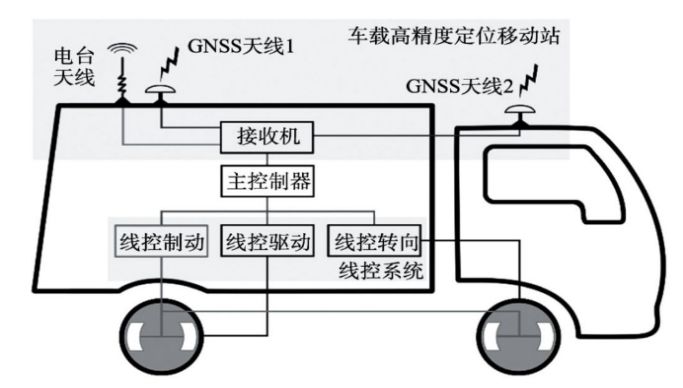
圖14 車載移動站示意圖
由于本篇專家文章篇幅過長,請看下一篇推文《雷洪鈞:汽車自動駕駛技術與實例的研究(下)》
-
攝像頭
+關注
關注
60文章
4849瀏覽量
95854 -
自動駕駛
+關注
關注
784文章
13846瀏覽量
166575 -
深度學習
+關注
關注
73文章
5506瀏覽量
121260
原文標題:【專家文章】雷洪鈞:汽車自動駕駛技術與實例的研究 (上)
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論