


汽車自動駕駛系統(Motor Vehicle Auto Driving System),是一種通過車載電腦系統實現無人駕駛的智能汽車系統,又稱無人駕駛汽車、電腦駕駛汽車、或輪式移動機器人,還有稱自動駕駛汽車(Autonomous vehicles;Self-pilotingautomobile)的。汽車自動駕駛系統,其結構,一般分為:感知系統、決策系統、執行系統3個部分。
2.0 自動駕駛的決策系統
自動駕駛決策系統負責路線規劃和實時導航。規劃和實時導航不僅高精度數字地圖,還要V2X通信網絡技術的支持。
2.1自動駕駛的操作系統
(a)操作系統,它是支持電腦基礎運作的軟件,例如任務安排、執行應用程序以及控制外部設備;(b)自動駕駛的操作系統要統一協調安排自動駕駛汽車的硬件各種雷達、攝像頭、聲吶等傳感器等硬件,組織成一個整體系統;(c)自動駕駛的操作系統必須內置高級的人工智能,引導自動駕駛的人工智能操作系統;(d)自動駕駛汽車的操作系統必須絕對安全可靠,即支持汽車的基礎功能和高級功能,并對接受的到數據實時回饋;(e)自動駕駛必需要求非常嚴苛的操作系統,必須知道現在汽車在哪里,知道周圍有什么,能預期接下來會發生什么并做出怎樣的應對反應;(f)無論是從復雜程度還是從監控廣度上,自動駕駛的操作系統,都應該優于電腦或者智能手機的操作系統
(a)ARM嵌入式Linux操作系統。ARM-Linux程序的開發,主要分為三類:應用程序開發、驅動程序開發、系統內核開發,針對不同種類的軟件開發,有其不同的特點。(b)自動駕駛汽車的操作系統三大核心能力:實時反饋、完全的可靠性,以及趕超人類的感知能力。管理自動駕駛汽車的操作系統在監控支配汽車時的反應必須精確到微秒級。
2.3自動駕駛處理器(芯片)
英偉達最新自動駕駛處理器,每秒30 萬億次運算,功率僅30瓦。圖片顯示的接口是支持的雷達、傳感器、攝像頭的。
圖15 Xavier芯片板
2.4算法
預估模型(見圖16)不同速度條件下的適應性算法,車輛當前航向角與航向變化預估量之和作為航向反饋量,期望航向與航向反饋量的差值則作為經典 PID 控制器的輸入偏差計算期望前輪偏角δ。
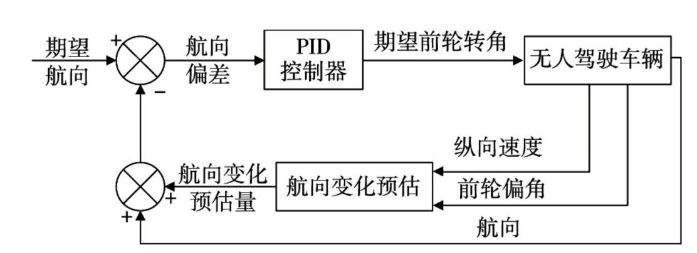
圖16 軌跡跟蹤算法預估模型
預估模型是電動轉向器控制的基本理論依據。
3.0自動駕駛的執行系統
執行系統也是底層控制系統,負責執行汽車的剎車、加速、轉向的具體操作。工程師們通過特制的“線控裝置”控制方向盤和油門,取代人類司機的手和腳。
3.1線控裝置
線控是的機電行業特定短語,是機電控制的一種物理控制方式。線控系統是用電空系統替代機械系統或者液壓系統。主要是指信號發生器與信號接收器之間的連接方式是通過線纜或其他動作傳到物體進行連接的。
簡單地說,自動駕駛汽車的線控執行,主要包括線控轉向、油門和制動。最難的部分是線控執行中的制動。
(1)線控轉向系統
線控轉向系統(Steer By Wire,SBW)去掉了轉向盤和轉向輪之間的機械連接,具有操縱性、穩定性能更優的特點,且作為主動轉向干預的一種方式。SBW系統結構如下圖(16),主要分為三個部分:
(a)轉向盤系統,包括轉向盤、轉矩傳感器、轉向角傳感器、轉矩反饋電動機和機械傳動裝置;(b)電子控制系統,包括車速傳感器,也可以增加橫擺角速度傳感器、加速度傳感器和電子控制單元以提高車輛的操縱穩定性;(c)轉向系統,包括角位移傳感器、轉向電動機、齒輪齒條轉向機構和其他機械轉向裝置等。
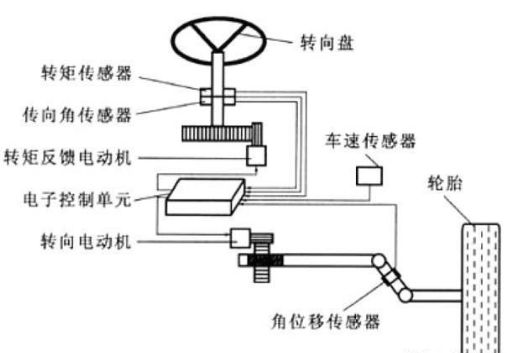
圖17 線控轉向系統(Steer By Wire,SBW)結構
(2)電助力轉向系統
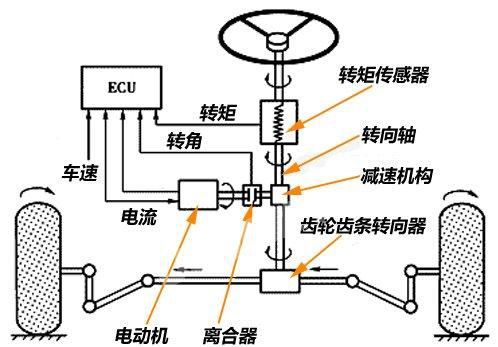
圖18 接觸式EPS電動助力轉向總成及原理
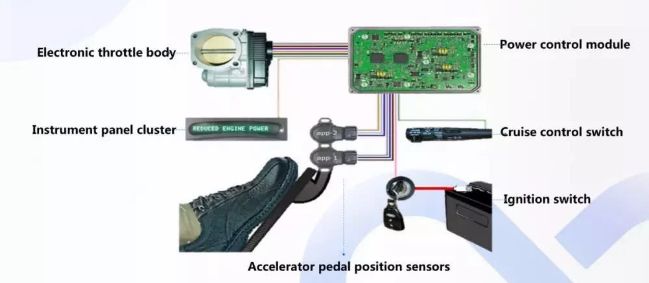
(3)線控油門系統
(a)線控油門系統的優點控制靈敏、精確,發動機能根據汽車的各種行駛信息精確地調節空燃比,改善發動機的燃燒狀況,提高動力性和燃油經濟性。還可與油壓、溫度和廢氣再循環電子信號結合,減少廢氣排放。減少機械組合零部件,相應減輕機械結構的重量,降低機械零部件的維修幾率。(b)線控油門系統組成線控油門主要由油門踏板、踏板位移傳感器、電控單元(ECU)、數據總線、電機和油門執行機構組成。(c)線控油門系統工作原理位移傳感器安裝在油門踏板內部,隨時監測油門踏板的位置,隨時監測油門踏板位置,當監測到油門踏板高度位置發生變化時,會瞬間將此信息傳送至伺服電機,由伺服電機驅動油門執行機構實行油門控制。
(4)線控制動系統主動安全的線控制動功能(Brake by wire),是電子控制單元及傳感器組成的系統,目前有:
(a)電子輔助制動系統(EBA);(b)適應巡航系統(ACC);(c)停-走系統(SMS);(d)電子穩定性控制系統(ESC);(e)主動避撞系統(ABC);(f)坡路防退系統(HHS);(g)電子駐車系統(EBC);(h)自動泊車系統(ASC);
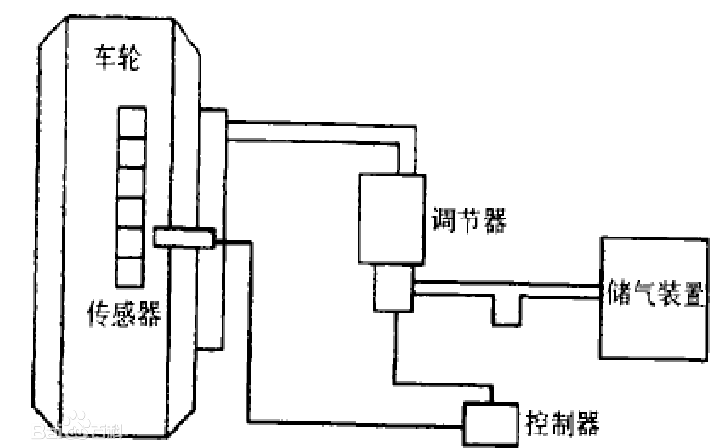
圖19 制動防抱死系統(ABS)原理圖
(5)CAN總線協議
(a)CAN(Controller Area Network):即控制器局域網,是一種能夠實現分布式實時控制的串行通信網絡。CAN是德國的Bosch公司開發的(和Intel)。(理解:通過CAN控制器能把多個微處理器(CPU)組成一個局域網,即控制器局域網。(b)CAN優點:使得它能夠被廣泛的應用。比如:傳輸速度最高到1Mbps,通信距離最遠到10km,無損位仲裁機制,多主結構。CAN控制器價格越來越低,很多MCU也集成了CAN控制器。現在每一輛汽車上都裝有CAN總線。(c))CAN應用場景

圖20 CAN應用場景
(d)CAN總線分類CAN總線分為高速CAN總線 低速CAN總線。在汽車上,高速信號是用于傳輸ABS、ESP、TCU等電子控制系統,這些系統需要實時的信號處理,所以用的是高速的CAN信號;而例如車燈等基礎設備則不需要高速的實施環境,所以用的是低速的CAN信號。
4.0通信系統
4.1 V2X通信網絡技術
V2X 是指車對外界的信息交換,是一系列車載通訊技術的總稱。V2X包含汽車對汽車V2V)、汽車對路側設備(V2R)、汽車對基礎設施(V2I)、汽車對行人(V2P)、汽車對機車(V2M)及汽車對公交車(V2T)等六大類。V2X是分為:
圖21 V2X(車對萬物)通訊模式
(a)基于網絡的通訊模式,即車對網絡V2N(車對網絡),比如通過互聯網通信;(b)直接通訊模式,涵蓋了車對車V2V(車對車)、車對基礎設施V2I(車對基礎設施)以及車對人V2P(車對人),比如通過5G 通信,射頻識別技術(英文:RadioFrequencyIDentification,縮寫:RFID)是一種無線通信技術,見圖21)。
圖22 射頻識別技術用于汽車管理
(c)兩種傳輸模式是互補的(見圖22)。
簡單的來說,V2V是一種比較自動駕駛更高級的技術。自動駕駛可以實現自動跟車,可以探測前方200米左右交通情況,并作相應的汽車輔助動作,如自動駕速度,自動剎車,但是它無法遇見前方的前方車什么狀態,是不是出了意外,這些要求有V2V的技術支持。
4.2電子電器架構
簡單來說,汽車電子電氣架構就是汽車內部各類通信線路、電子控制新芯片、以及現代導航系統、汽車智能網絡構成的電氣系統。電子電氣架構(Electrical/Electronic Architecture),,是由德爾福公司提出的,集合汽車的電子電氣系統原理設計、中央電器盒的設計、連接器的設計、電子電氣分配系統等設計為一體的整車電子電氣解決方案的概念。
通過EEA的設計,可將動力總成、驅動信息、娛樂信息等車身信息轉化為實際的電源分配的物理布局、信號網絡、數據網絡、診斷、容錯、能量管理等的電子電氣解決方案。優化汽車電子電氣架構設計,可在有效完善汽車綜合性能的同時,控制降低汽車總重量和生產成本,對于現代汽車制造業的進一步發展,具有重要的現實意義。
4.3安全解決方案
自動駕駛車輛安全主要是指,包含安全設計和安全運行兩大主要內容,其中細分為操作安全、環境安全、行為安全、功能安全、質量安全、機制安全和安全進化七大內容。
4.4云平臺
(1)云端主要提供兩大功能,包括分布式計算和分布式存儲。云平臺的第一個應用就是仿真,如圖23所示。
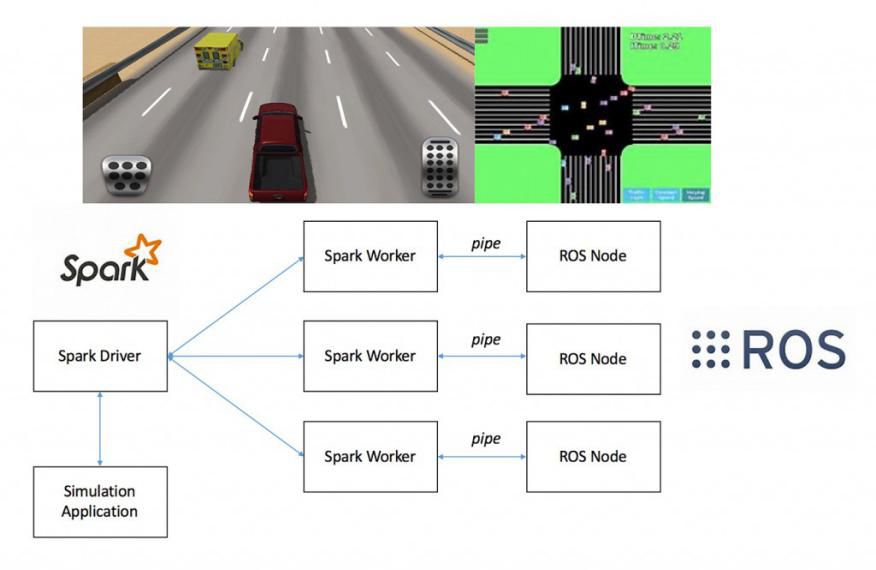
圖23 云平臺仿真
(2)高清晰度地圖生成
如圖24所示,高清晰度地圖的生成是一個復雜的過程,涉及到很多步驟。包括原始數據處理,點云生成,點云對齊,2維反射地圖生成,高精度地圖標記以及最終地圖生成。
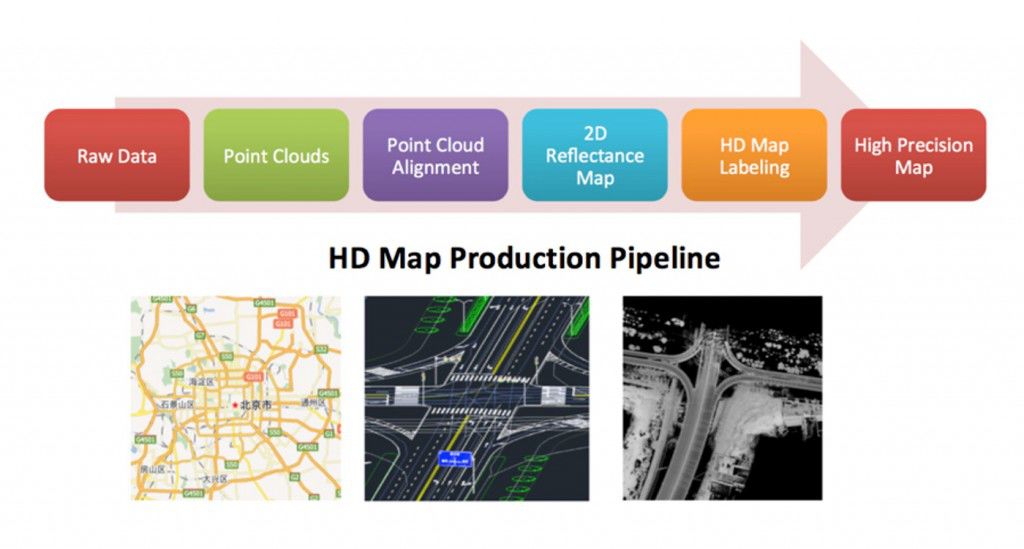
圖24 高清晰度地圖生成過程
(3)深度學習模型訓練
自主駕駛使用了多種不同的深度學習模型,所以要持續更新模型來保證它們的有效性和高效性。由于原始數據的量非常的大,僅靠單機是很難快速地完成模型的訓練的,必須開發高可擴展的分布式深度學習系統。二、自動駕駛車輛車輛實例
1.自動駕駛汽車硬件系統
自動駕駛的硬件系統,可以粗略地分為感知、決策、控制三部分(還有定位、地圖、預測等模塊)。

圖25 自動駕駛的硬件系統
(1)自動駕駛汽車傳感器
自動駕駛使用的感知類的傳感器,主要有激光雷達、毫米波雷達、攝像頭、組合導航。

圖23 感知類的傳感器
(a)激光雷達:安裝在車頂,360度同軸旋轉,可提供周圍一圈的點云信息。激光雷達不僅用于車輛感知,也用于定位和高精度地圖的測繪。(b)攝像頭:光線通過鏡頭、濾光片到后段的CMOS或CCD集成電路,將光信號轉換成電信號,再經過圖像處理器(ISP)轉換成標準的RAW,RGB或YUV等格式的數字圖像信號,再通過數據傳輸接口傳輸到計算單元。(c)毫米波雷達:和激光雷達有點類似,基本原理是發射一束電磁波,通過觀察回波和射入波的差異來計算距離和速度,主要分24G和77G,它的安裝是在保險杠上面。(d)組合導航:GNSS+INS融合在一起就是組合導航系統。一是,GNSS板卡,通過天線接收GPS和RTK信號,解析計算出自身的空間位置。二是,當車輛行駛到林蔭路,或者是有些建筑物,GPS就會沒信號或者產生多徑效應,定位就會產生偏移和不準。此時需要通過INS的信息融合來進行組合運算。
(2)傳感器設計適用范圍(表1)
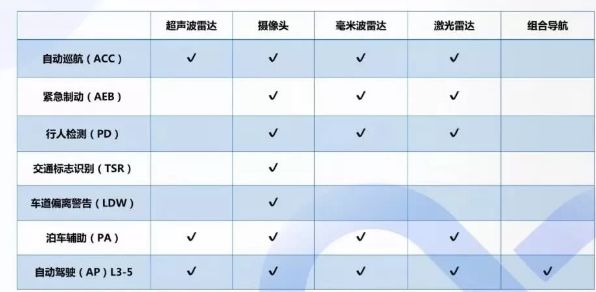
表1 傳感器設計適用范圍
(3)傳感器與車速度的關系(a)不同速度下的剎車距離及參考值(表2)
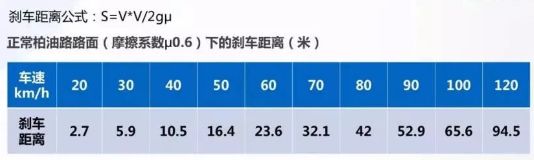
表2 不同速度下剎車距離計算公式及參考值
目前,我國城市封閉道路限速80,高速最高限速120。通過這個公式能計算出剎車距離,限速120的情況下最少需要150米的探測范圍。(b)不同速度下制動距離計算公式及參考值(表3)
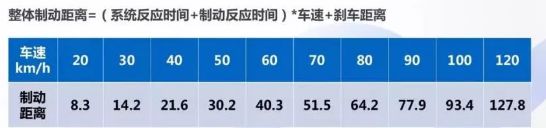
表2 不同速度下制動距離計算公式及參考值
限速120的情況下,其制動距離,如果能到200米會更好。
(4)傳感器與分辨率的關系(見圖24)
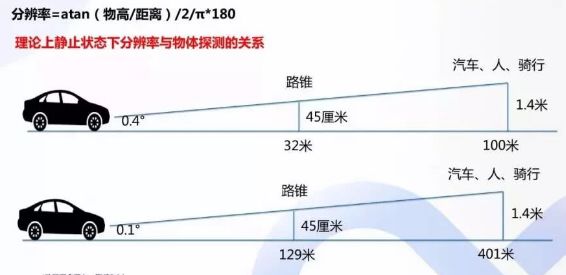
圖24 傳感器與分辨率的關系
分辨率是通過反正切函數來計算的。
2.自動駕駛汽車的計算單元
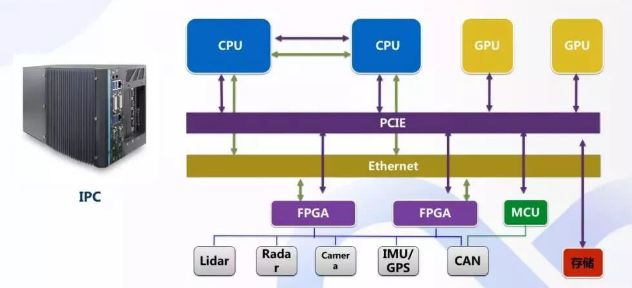
圖25 自動駕駛汽車計算單元
(a)PCI-Express(peripheral component interconnect express)是一種高速串行計算機擴展總線標準;(b)以太網(Ethernet)是一種計算機局域網技術。以太網是目前應用最普遍的局域網技術,取代了其他局域網標準如令牌環、FDDI和ARCNET;(c)CAN是控制器局域網絡(Controller Area Network, CAN)的簡稱,是由以研發和生產汽車電子產品著稱的德國BOSCH公司開發的,并最終成為國際標準(ISO 11898),是國際上應用最廣泛的現場總線之一。
3.自動駕駛汽車的線控系統
圖26 線控系統總成
自動駕駛車輛的線控系統,分減速、轉向和加速三大部分。
(a)自動駕駛車輛的線控轉向系統
(b)自動駕駛車輛的加速線控系統
(c)自動駕駛車輛的線控制動解決方案(圖29)。MK C1將制動助力以及制動壓力控制模塊(ABS、ESC)集成一個制動單元當這個失效的時候還有一個MK 100保證冗余。

3.自動駕駛整車實例
1)Autopilot 2.0的特斯拉自動駕駛汽車
圖30 Autopilot 2.0的特斯拉自動駕駛汽車
(a)該車共配備 8 個攝像頭(3個前置攝像頭(不同視角 廣角、長焦、中等);2個側邊攝像頭(一左一右);3個后置攝像頭;12個超聲波傳感器(傳感距離增加一倍);一個前置雷達(增強版);一個后置倒車攝像頭),達到 360 度全車范圍覆蓋,最遠檢測可達 250 米;(b)搭載12顆超聲波前置雷達可以穿越雨、霧、塵環境,豐富視覺系統的探測數據;傳感器,用以輔助偵測,對物體的距離、軟硬精準度有更大的提升;(c)增強版的毫米波雷達,能夠在惡劣天氣下工作,也能探測到前方車輛;(d)汽車主板集成了 Nvidia PX2 處理芯片,運算能力比起第一代自動駕駛系統要高 40 倍,其的性能是前款產品的40倍,大幅提升計算能力。
2)Apollo 2.5自動駕駛汽車
圖 31 Apollo 2.5自動駕駛汽車
Apollo 2.5(限定區域內基于視覺的高速自動駕駛),2套新的硬件系統支持:第一套是禾賽的Pandora套件+2個廣角攝像頭+1個毫米波雷達;另一套是單目廣角攝像頭+1個毫米波雷達。
3)東風無人駕駛L4智能卡車
L4智能卡車具有自適應巡航系統和車道保持實現自動跟車、遇彎道行駛完全自主轉向等功能。
4)深圳自動駕駛公交車
車上配有激光雷達、毫米波雷達、攝像頭、GPS天線等設備,實現自動駕駛下的行人和車輛檢測、減速避讓、緊急停車、障礙物繞行、變道、自動按站停靠等功能。
圖33 深圳自動駕駛公交車
-
傳感器
+關注
關注
2567文章
53080瀏覽量
768245 -
控制器
+關注
關注
114文章
17136瀏覽量
184568 -
自動駕駛
+關注
關注
790文章
14341瀏覽量
170863
原文標題:【專家文章】雷洪鈞:汽車自動駕駛技術與實例的研究(下)
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監

評論