 轉向線控改裝就是要奪取EPS的控制權
轉向線控改裝就是要奪取EPS的控制權
轉向線控改裝就是要奪取EPS的控制權。在沒有車廠或EPS廠家的幫助下,任何轉向線控改裝缺點都有很多,都不穩定,不安全,不舒適。傳統廠家仍掌握絕對話語權。
通常轉向線控改裝采用幾種方式,第一種最為簡潔,效果最好,就是用dSpace的MicroAutoBox。MicroAutoBox是針對快速原型RCP設計的,可以看做一個萬能的實時硬件平臺,內部也包含了對電機PWM的控制。MicroAutoBox缺點是價格昂貴,并且取代了原車的EPS控制器,舒適感肯定要大打折扣,不過這已經是最好的方案。
第二種通過UDS (Unified Diagnostic Services),統一診斷服務或其他方式跳過EPS控制器直接控制EPS電機。(與OBD相比,UDS只覆蓋會話層和應用層,標準為ISO14229,又叫增強型診斷)。第三種,偽裝成LKA的控制器給EPS控制器發指令。第四種,偽裝成自動泊車控制器給EPS控制器發指令。第五種,直接在管柱轉向軸或方向盤上價格伺服電機,這種方法雖然很Low,但是是最為容易的,不過伺服電機的相應速度通常不高,伺服電機加整套伺服系統價格也不低。 最后還有一種我認為不可能的,就是用電路模擬扭矩轉角傳感器即TAS。偽裝成一個TAS給EPS控制器發指令。
最典型的改裝莫過于業內用的最多的林肯混動MKZ。林肯混動MKZ基于福特CD4混動平臺,改裝一般是由Dataspeed負責,AutonomousStuff負責系統集成。成立于 2008 年的 Dataspeed 正是這樣一家第三方公司,他們利用 自己在福特工作時的經驗,將MKZ的CAN 總線協議破解并封裝成 ADAS Kit 提供于開發者。盡管如此,Dataspeed的線控轉向方案也有不少缺點。 Dataspeed的線控轉向指標為100Hz報文,50Hz命令,10Hz超時。而高級EPS的周期高達20KHz。Dataspeed的線控轉向最大幅度為±470度,轉向精度為0.1度,最高轉向速度每秒500度。方向盤與轉向輪的角度系數為14.8:1。EPS會設定一個最高扭矩上限,在MKZ里是3.5牛米,超過這個扭矩的指令都會被忽略,這個是無法更改的。除此之外,還有眾多無法更改的限制條件,轉向扭矩必須在負1.5牛米到正1.5牛米之間,轉向速度在正50度每秒到負50度每秒之間,此值之外的指令可能會被忽略或降級。這就決定了車輛無法像人工那樣急速轉向,特別是高速時,人工可以選擇急速轉向,但改裝車輛通常只能選擇剎車,而這時往往是無法完全剎停的。此外,Dataspeed的線控轉向只允許輸入位置指令也就是橫擺角速度,無法直接輸入扭矩指令。
Dataspeed的線控轉向是業內最優秀的后期改裝方案,據說也得到了福特官方的支持,但是MKZ的轉向EPS(可能是博世)廠家并未對Dataspeed提供支持。Dataspeed的線控轉向改裝極有可能是第二種方案,通過UDS。因為通常UDS的指令調度周期就是50Hz,也就是20毫秒,跟原車20KHz的周期相比頓挫感在所難免。再加上傳統的PID控制算法,方向盤不僅頓挫明顯,還出現明顯的振蕩。即便是Waymo也是無能為力的,Waymo的FCA大捷龍是特別請了大捷龍的EPS供應商Nexteer做的線控轉向改裝,而Nexteer在2011年被中國航空汽車工業控股公司4.5億美元現金收購,Waymo還是離不開中國國企的。
1
UDS方案
先來分析UDS方案。EPS系統有兩種設計方案,一種是雙MCU方案,一種是單MCU方案。
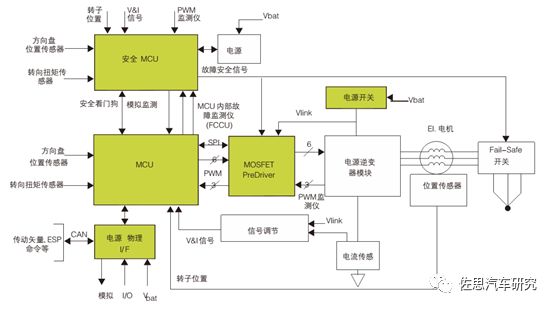
雙MCU方案:這種架構的優勢是物理復制安全相關和非安全相關的功能與特性。然而,這種配置非常復雜,再加上軟件同步及PCB空間增加等因素,會給這種方法帶來巨大的挑戰和障礙。隨著終端設備數量不斷增加,系統功能的可靠性和可用性降低了。這種配置可能會引入如單事件誘因的瞬時故障,在這方面不會實現良好的容限。
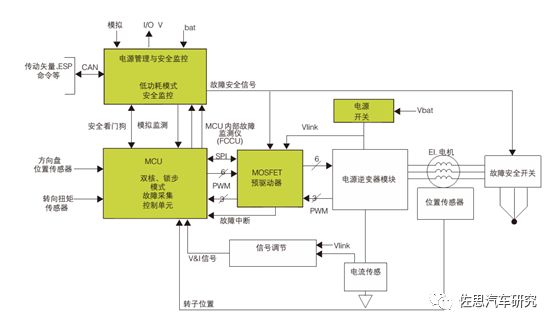
單MCU方案:采用一個雙核或三核的MCU,運行在鎖步狀態下,將監測功能集成到電源IC中,這種方法降低成本,減少了軟件開發周期。
EPS系統所用的電機早期為BLDC直流無刷電機,但直流無刷電機的轉矩波動比較大,隨著EPS系統對控制精度要求越來越高,BLDC顯得力不從心,于是PMSM永磁同步電機出場,PMSM在轉矩波動領域相對BLDC優勢十分明顯,但這也帶來了難題。無刷直流電機:磁鋼為方波充磁,控制電壓PWM也為方波,電流也為方波。一個電周期有6個空間矢量。控制簡單,成本低,一般的MCU就可實現。 永磁同步電機:磁鋼為正弦波充磁,反電動勢也為正弦波,電流也為正弦波。一般采用矢量控制技術,一個電周期一般最少會有18個矢量(當然越多越好),需要高性能的MCU或DSP才能實現。
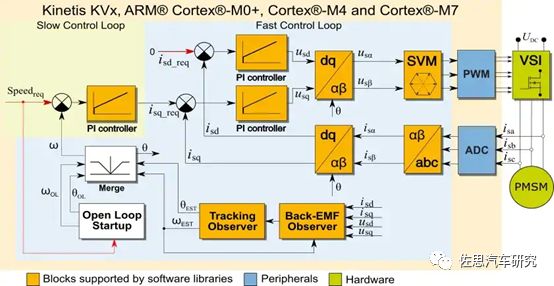
上圖為典型的EPS 電機控制框架圖。SVM為空間矢量脈寬調制,是由三相功率逆變器的六個功率開關元件組成的特定開關模式產生的脈寬調制波,能夠使輸出電流波形盡可能接近于理想的正弦波形。VSI為電壓源逆變器。EPS用PMSM通常使用SVPWM,此類控制器直接作用于電機轉子磁場,因為需要計算多個坐標轉換(Clark/Park轉換, αβ/abc變換),每50微秒(20KHz)對兩個相電流進行一次調節。
UDS的門檻也是很高的,也需要原廠支持,首先要獲得原廠的診斷數據庫,其次要有種子解密。UDS的26種服務中,有7種很重要。它們分別是:$10 Diagnostic Session Control(診斷會話),$14 Clear Diagnostic Information(清除診斷信息),$19 Read DTC Information,$22 Read Data By Identifier(通過ID讀數據),$27 Security Access(安全訪問),$2EWrite Data By Identifier(通過ID寫數據),$3E Tester Present(待機握手)。ECU當中有很多數據是整車廠獨有的,并不希望開放給所有客戶,它需要做一個保密的設定。在讀取一些特殊數據的時候,要先進行一個安全解鎖。ECU上電之后是一個鎖定的狀態(Locked),我們通過$27服務,加上一個子服務,再加上一個鑰匙,這樣的服務請求可以進行解鎖。比如 2n-1是一個子服務,通過首輪種子的請求,首輪ECU會返回67+01+AA+BB+CC+DD,AA~DD就是種子了。之后第二輪,診斷端會利用種子進行運算(利用整車廠的算法),生成k1(不一定是1個字節),那么發送請求,27+02+[k1]。ECU同樣也會通過種子算出k2。當k1和k2匹配時,解鎖(Unlocked)成功。
例子:Rx: 02 27 05 00 00 00 00 00 安全訪問,05子功能
Tx: 07 67 05 08 27 11 F0 77 肯定響應,回復了對應安全級別的種子
Rx: 06 27 06 FF FF FF FF 00 發送密鑰,4個FF。注意06是與05成對使用的。
Tx: 03 7F 27 78 00 00 00 00 否定響應,7F+27+NRC
Tx: 02 67 06 00 00 00 00 00 肯定響應,通過安全校驗
2
偽裝TAS方案
再來看偽裝TAS的方案。
EPS其所有基本控制模塊,輸入要么需要方向盤力矩信號,要么需要方向盤轉角信號(方向盤轉速通過轉角信號計算得到),這兩個信號一般來說是通過一個扭矩轉角傳感器TAS(Torque and Angle Sensor)來獲取。TAS的扭矩檢測功能,其本質上還是一個轉角傳感器,TAS與扭桿組裝在一起構成扭矩傳感器總成,方向盤轉動時,扭桿與扭矩傳感器的上半部分與下半部分存在一個相對偏轉角,TAS就是通過檢測這個相對轉角來測量方向盤力矩的。在實際的應用中,還有TIS(Torque+Index Sensor)和TOS(Torque Only Sensor)兩種,TIS只能提供扭矩信號和絕對轉角的過零信號脈沖,系統可以結合電機角度來得到方向盤角度;TOS只能提供扭矩信號。TOS用在對EPS要求不高的場合,也有一些使用車輛電子穩定系統(ESP/ESC)里的轉向角度傳感器,當然這個與真實的方向盤轉角可能有誤差,但在講究成本的廠家那里,這不是問題。
目前TAS主要由德國Hella、博世和法國Valeo提供,其中Hella市場占有率很高,順便說一下,Hella最主要的業務還是汽車照明。Hella使用CIPOS技術,不僅用在TAS上,也可以用在機油液面高度傳感器、廢氣循環傳感器、變速箱位置傳感器、電機位置傳感器、踏板位置傳感器上,累積出貨量已經超過8億個。
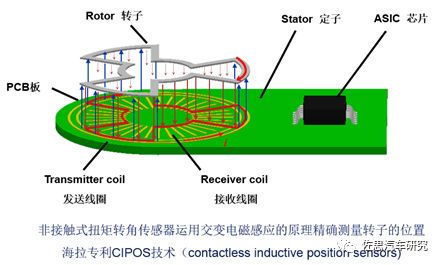
CIPOS原理圖如上
TAS爆炸圖如上,目前TAS已經在上海國產,但是關鍵的傳感器齒輪組仍然進口。
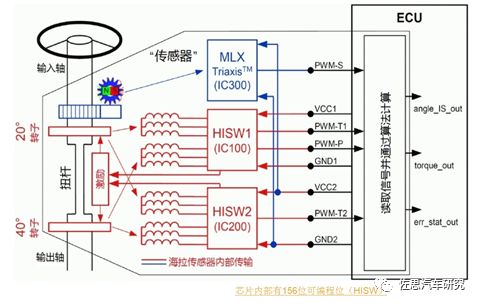
上圖為Hella的TAS內部框架圖,MLX Triaxis是MELEXIS的旋轉位置傳感器IC。
要偽裝成TAS來欺騙EPS,就需要通過目標助力力矩逆向求解管柱輸入力矩,還需要逆向轉角信號,這是無法做到的。因為EPS的算法太復雜了 。逆向工程可能要比整個自動駕駛系統算法還復雜。
EPS貌似主要是機電領域的工作,實際更多是算法領域的工作,據耐世特稱,其EPS系統的算法代碼高達430萬行,而線控轉向的算法代碼高達1350萬行。為什么會這么復雜?主要是增加了四項功能,包括方向盤穩定補償器、轉向輪振動抑制、方向盤回正控制、駕駛員重疊扭矩操作。
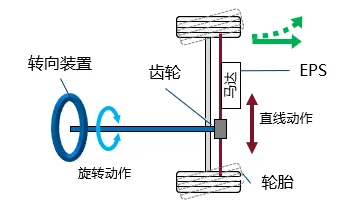
電動轉向(EPS)系統使用電動馬達, 直接耦合到轉向器或轉向管柱,以減少駕駛員轉動方向盤所施加的力矩。為了進一步解釋,在車輛的操作期間,駕駛員將力施加到轉向輪(SW)以努力使車輛轉向。這導致“駕駛員扭矩”施加到耦接到SW的軸。扭矩傳感器檢測由駕駛員施加到轉向管柱的扭矩,并將此信息通信到電控制單元。電控制單元產生應用到電動馬達的馬達控制信號,使電動馬達產生與駕駛員扭矩組合的“馬達輔助扭矩”。然后,該組合的扭矩用于使車輛的“角部”轉向。
第一個是方向盤穩定補償器。
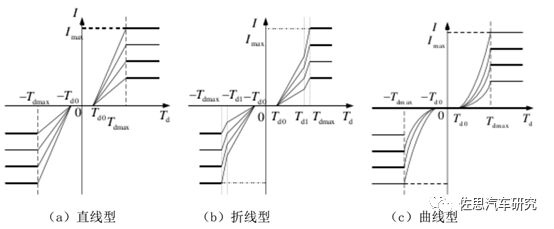
大部分EPS系統使用助力特性查找表來決定所需要的輔助扭矩,查找表可以直觀做成一組線條,有時這些助力特性查找表就叫輔助圖像。最為理想的一種是曲線型,該種類型的助力特性曲線對于反映出的相關信息更接近助力轉向系統的理想工作狀態。這在電路上是一種負反饋放大電路,負反饋系統中,有個相位裕度(phase margin,PM),亦稱相位余裕的問題,相位裕度可以看作是系統進入不穩定狀態之前可以增加的相位變化,相位裕度越小,系統越不穩定,可能在某一時刻階躍響應的過沖,振蕩幅度急劇增加。相位裕度越大,系統越穩定,但同時時間響應速度減慢了,因此必須要有一個比較合適的相位裕度。在不引入超前滯后矯正模塊或者超前滯后矯正模塊參數沒有調節好的情況下,給轉向盤稍微加一個激勵,方向盤在可能某一位置不停震蕩。滯后超前模塊的引入就是為了消除這一現象而設計,有做兩階補償的、有三階補償的、有四階補償的。這種振蕩自然是在高頻段。因此補償的思路一般是在低頻段盡量不影響原系統的幅頻和相頻特性,在中頻段降低系統增益,在高頻段提高系統的相頻特性,以獲得更大的相位裕度。因此需要高通和低通濾波器,甚至還需要一個帶通濾波器。這種方法的缺點是往往增加了更高頻率的增益或增加了對噪音的敏感程度,比較好的解決方法是使用齒輪角速度反饋控制,但是這需要齒輪角速度傳感器,這種傳感器目前還沒有到量產階段。
第二個是轉向輪振動(SWV)。
當車輛以典型的公路速度(例如,45-90mph)操作時,在車輛的角部的不規則激勵可能在車輛的轉向輪處導致內部產生的周期扭轉振動。如在此使用,術語“角部”是指在車輛的車輪位置處從橫拉桿向外的部件。構成角部的部件可以包括輪胎、車輪、制動盤、輪轂軸承組件、控制臂、轉向節、襯套等。振動的內部源的示例是偏心失圓或其他不規則旋轉部件。例如,如果輪胎、車輪、輪轂和/或轉子以偏心或失衡方式制造或者安裝到車輛,則所述部件以不均勻的重量分布旋轉。這繼而在車輛中可產生周期或諧波振動,也就是說,具有集中(定中心)在一階頻率處的一階分量以及集中在一階頻率的整數倍的頻率處的更高階或多階分量的振動。周期振動的一階分量集中在與旋轉對象相同的頻率,該一階分量源于該旋轉對象,并且對于轉向系統,其通常具有比其高階分量更大的幅度或強度。例如,以每秒 15轉(15 Hz)旋轉的車輪可以產生具有15 Hz—階分量、30Hz 二階分量、45 Hz三階分量等的周期振動。一階或15 Hz分量通常比二階和三階分量更強。應理解,偏心旋轉部件僅是車輛中的周期振動的一個可能源,因為也存在許多其他源。 內部源引起的周期振動可以傳播通過車輛,并且會引起某些車輛部件的駕駛員可注意到的不合期望的搖動或移動。例如,在車輪組件或角部產生的周期振動會結合從而對轉向輪管柱組件產生動態扭矩,這引起轉向輪在任何一個方向以小幅度周期地轉彎。當在平面或平坦路面上發生此類事件時,對于駕駛員都更加明顯,這些振動可以被車輛的駕駛員感測到,稱為轉向輪振動(SWV)。SWV的頻率通常與輪胎旋轉頻率(例如,輪胎的滾動頻率) 的速度和一階諧波成比例。動態幅度是小的接近或超過0. 03度感知閾值。
解決方法有三種,第一種是機械部件級方面的努力,包括增加減震,提高部件同心性和加工精度。第二種是純軟件,依靠復雜算法提取SWV并做以補償,抵消振動。缺點是如果出貨量太低,軟件分攤成本較高,還有可能干擾正常駕駛操作。第三種是軟硬兼施,增加一個齒輪或齒條的瞬時角速度傳感器,也可以用算法估計。使用輪胎的估計的角速度和估計的角位置(以及下面描述的其他幅度和相位調整)來確保ECU在適當頻率操作,從而確保減少周期波動的角差異。這樣,增益和相位補償的馬達驅動命令信號使電動馬達調整馬達扭矩,以動態地減小(與通過傳感器感測的干擾信號相應的特定角頻率的)周期電扭矩信號中的周期內容,從而減弱傳送到轉向輪的振動。通用握有第三種方案的專利。
第三,方向盤回正。
方向盤轉動過程中,側偏力與主銷后傾距形成側偏力回正力矩,同時還有重力力矩和縱向力力矩,合在一起叫回正自力矩。不過在低速行駛時,回正力矩不足。高速時,回正力矩過量。EPS就是要解決這個問題。增加一個回正力矩,傳統算法是PID算法,不過EPS非線性系統,噪音多,為避免閉環系統產生振蕩,PID的實時性很差。好點的采用滑模控制SMC,方法簡單,容易實現,但要求系統模型精度較高。
第四,駕駛員重疊超控扭矩操作。
簡單地說就是某些狀態下,出現了重疊超控扭矩操作,駕駛員不希望EPS系統介入,EPS此時應停止介入轉向操作。在具有主動扭矩重疊操作的預定EPS狀態期間對一組轉向動態性能進行建模,從而生成動態轉向模型(DSM),測量一組車輛操作值;處理該組車輛操作值和DSM,從而檢測駕駛員介入,其中駕駛員介入對應于超控扭矩重疊操作的駕駛員意圖;和當檢測到駕駛員介入時自動超控扭矩重疊操作。如果檢測到駕駛員的意圖是要單獨掌控轉向,那么EPS就退出。毫無疑問,這樣的系統非常復雜,通用和博世在此領域擁有不少專利。
顯然,想逆向輸入力矩不大可能。逆向出來的結果肯定會出現轉向不足、轉向過量和階躍振蕩,很不安全。
3
偽裝成LKA控制器
上圖為典型的齒條型或齒輪型EPS,歐美車型通常都選擇齒條型或齒輪型的EPS而非亞洲市場的C型EPS。大多數配備LKA功能的車型都選擇齒條型或齒輪型EPS。

上圖為LKA的邏輯流程,LKA目前有DLC和TLC兩種,也有融合兩種算法的,不過常見的還是TLC。用攝像頭檢測車道線并檢測到率曲率,在車輛即將越過車道線前發出警告,如果駕駛員不采取轉向措施,那么車輛會主動轉向來避免越過車道線,通常LKA都與ACC自適應巡航聯動,也就是說必須開啟ACC才能啟動LKA,特別是日系車。也有單獨啟動LKA的,相對比較少見。LDW則是可以單獨啟動。LKA給出期望的橫擺角速度,然后由一個STM(轉向扭矩管理器)來將橫擺角速度轉化為合適的扭矩指令給EPS系統,EPS系統再啟動電機轉向。
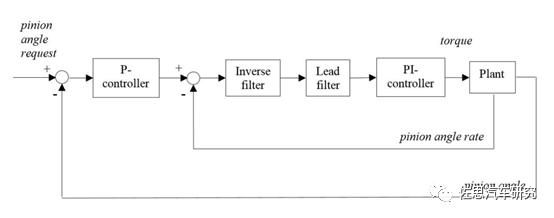
上圖為STM框架圖,也就是一個簡單的PI控制器。
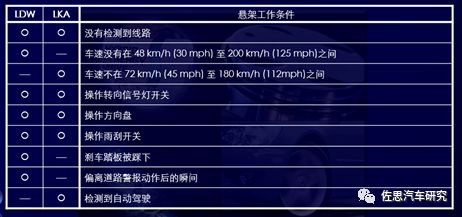
典型LKA系統的工作條件如上表,這里的自動駕駛是指檢測駕駛員手離開方向盤15秒以上或在曲率半徑低于1000米的彎道上行駛超過5秒。此外還包括車速必須在每小時72-180公里之間,有些是60-150公里之間。方向盤檢測不到力矩,信號燈和雨刮開關都關閉。要偽裝成LKA就要屏蔽掉轉向信號燈和雨刮器信號,屏蔽掉方向盤重力傳感器(放手駕駛),偽造一個合適的車速,偽造一個ACC啟動信號。當然破解原廠CAN協議也是少不了的。奔馳寶馬沃爾沃的某些車型則是FLEXRAY協議,破解難度極高,幾乎不可能。
通常STM是無法更改的,而這個STM是為LKA系統而非自動駕駛設計的,通常LKA的力矩范圍非常有限,畢竟LKA僅僅是要保持車輛不超過車道線的。看過LKA的人都知道,LKA動作很輕微,持續時間很短,幾乎無法察覺。再有LKA只針對高速場景,高速時EPS會主動增加阻尼,但自動駕駛此時往往是在低速狀態,這就導致轉向不足或發生振蕩,有可能不安全。
4
偽裝成自動泊車控制器
第四種方案與第三種類似,和LKA一樣,自動泊車APA的限制條件也很多,并且更復雜,需要屏蔽的更多。任何方向盤、油門踏板、制動踏板的動作都會導致退出自動泊車狀態。此外還包括檔位不在倒檔。跟LKA相反,自動泊車被限制在時速10公里以下,甚至更低。需要偽造一個低速情景,而低速時,EPS的助力增益是比較大的。
-
控制器
+關注
關注
112文章
16385瀏覽量
178378 -
伺服電機
+關注
關注
85文章
2048瀏覽量
57938 -
EPS
+關注
關注
6文章
195瀏覽量
31277
原文標題:線控轉向改裝與EPS
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【升級公告】新增設備分享功能,支持控制權分享、身份...
SDK制動電機有多少控制權
電動助力轉向系統EPS的原理是什么?
電動助力轉向EPS——理論公式推導及simulink模型
博通高通展開董事會控制權攻防戰,博通欲推翻高通董事會
為何不讓AI做正確的抉擇_人類要逐漸交出控制權

電動助力轉向控制器(EPS)

什么是EPS?通過馬達來輔助轉向操作的系統





 工商網監
工商網監
評論