") 分析MEC與C-V2X融合應用場景
分析MEC與C-V2X融合應用場景
MEC與C-V2X融合可以對C-V2X端到端通信能力提供增強,也可以對C-V2X應用場景提供輔助計算、數據存儲等支持。MEC與C-V2X融合具有網絡信息開放、低時延高性能、本地服務等特性。不同的C-V2X場景可能需要其中某一個或數個方面的能力;同一個C-V2X場景也可能通過MEC與不同通信技術的組合來實現。


縮略語
3GPP第三代合作伙伴項目(the 3rd Generation Partnership Project)
AR增強現實(Augmented Reality)
C-V2X蜂窩車用無線通信技術(Cellular Vehicle to Everything)
MEC多接入邊緣計算(Multi-access Edge Computing)
RSU路側單元(Road Side Unit)
MEC與C-V2X融合的內涵
多接入邊緣計算(Mult i - a c c e s s Ed g eComputing,MEC) 概念最初于2013年出現,起初被稱為移動邊緣計算(Mobile EdgeComputing),將云計算平臺從移動核心網絡內部遷移到移動接入網邊緣。2016年后,MEC內涵正式擴展為多接入邊緣計算,將應用場景從移動蜂窩網絡進一步延伸至其他接入網絡。
C-V2X是基于蜂窩(Cellular)通信演進形成的車用無線通信技術(Vehicle to Everything,V2X)技術,可提供Uu接口(蜂窩通信接口)和PC5接口(直連通信接口)1 。MEC與C-V2X融合的理念是將C-V2X業(yè)務部署在MEC平臺上,借助Uu接口或PC5接口支持實現“人-車-路-云”協同交互,可以降低端到端數據傳輸時延,緩解終端或路側智能設施的計算與存儲壓力,減少海量數據回傳造成的網絡負荷,提供具備本地特色的高質量服務。MEC與C-V2X融合的場景視圖如圖1所示。
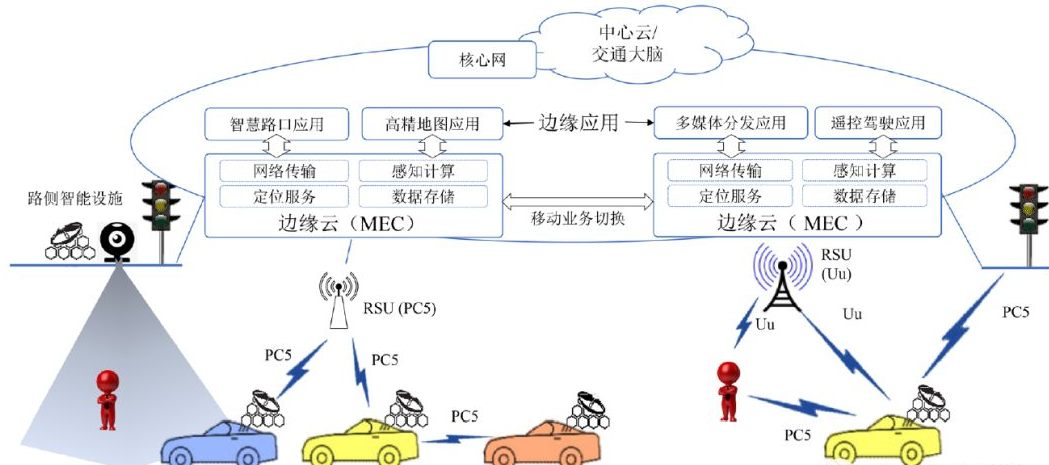
圖1 MEC與C-V2X融合場景視圖
MEC與C-V2X融合的特性
不同的C-V2X應用場景從時延、帶寬和計算能力等方面對網絡環(huán)境提出了各類不同要求。例如,在3GPP對eV2X(增強型V2X)場景的需求分析中(TR38.913),時延要求最嚴格的自動駕駛和傳感器共享場景,對時延的要求最低達到了3ms;帶寬需求最大的傳感器共享場景,對帶寬的要求最高達到了1Gbps;全局路況分析場景對服務平臺的計算能力提出要求,要能快速對視頻、雷達信號等感知內容進行精準分析和處理。
MEC與C-V2X融合可以對C-V2X端到端通信能力提供增強,也可以對C-V2X應用場景提供輔助計算、數據存儲等支持。MEC與C-V2X融合具有網絡信息開放、低時延高性能、本地服務等特性。不同的C-V2X場景可能需要其中某一個或數個方面的能力;同一個C-V2X場景也可能通過MEC與不同通信技術的組合來實現。
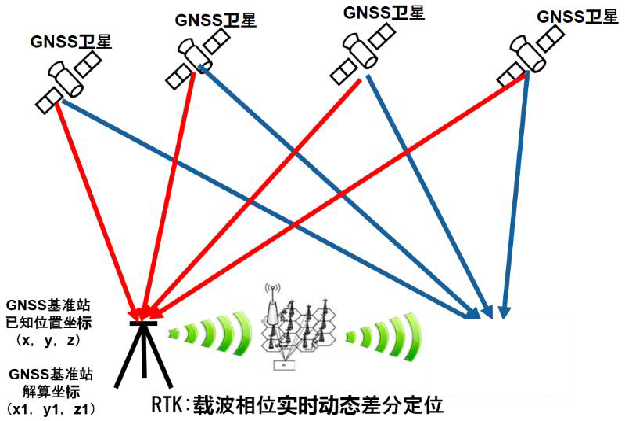
網絡信息開放:在網絡管理允許的情況下,MEC能夠承載網絡信息開放功能,通過標準化接口開放邊緣網絡的實時狀態(tài)信息,包括無線網絡信息、位置信息、用戶信息等。例如,在C-V2X的應用中,對高精度定位的需求較大,利用MEC的位置信息開放可以輔助車載終端實現快速定位,有效提高定位效率和精度。另外,利用MEC開放的無線網絡信息也可以對TCP傳輸的控制方法進行優(yōu)化,有效規(guī)避高清視頻等多媒體數據傳輸過程中發(fā)生的網絡擁塞。
低時延高性能:MEC運行在靠近用戶終端的網絡邊緣位置,能夠顯著降低C-V2X業(yè)務的傳輸時延、提供強大的計算與存儲能力、改善用戶體驗。例如,駕駛安全類C-V2X業(yè)務對通信時延提出了苛刻的要求,將此類業(yè)務部署在MEC上,相比部署在中心云上可以顯著降低業(yè)務響應時間。另外,MEC也可以為車載/路側/行人終端提供在線輔助計算功能,實現快速的任務處理與反饋。
本地服務:MEC具備本地屬性,可以提供區(qū)域化、個性化的本地服務,同時降低回傳網絡負載壓力;也可以將接入MEC的本地資源與網絡其它部分隔離,將敏感信息或隱私數據控制在區(qū)域內部。例如,在智慧交叉路口場景中,MEC可以融合和分析多個路側及車載傳感器采集的數據,并對大量數據提供實時、精確和可靠的本地計算與分析。
MEC與C-V2X融合的場景分類
MEC與C-V2X融合場景,可按照“路側協同”與“車輛協同”的程度進行分類。無需路側協同的C-V2X應用可以直接通過MEC平臺為車輛或行人提供低時延、高性能服務;當路側部署了能接入MEC平臺的路側雷達、攝像頭、智能紅綠燈、智能化標志標識等智能設施時,相應的C-V2X應用可以借助路側感知或采集的數據為車輛或行人提供更全面的信息服務。在沒有車輛協同時,單個車輛可以直接從MEC平臺上部署的相應C-V2X應用獲取服務;在多個車輛同時接入MEC平臺時,相應的C-V2X應用可以基于多個車輛的狀態(tài)信息,提供智能協同的信息服務。
在本白皮書的后文中,依據是否需要路側協同以及車輛協同,將MEC與C-V2X融合場景分為“單車與MEC交互”“單車與MEC及路側智能設施交互”“多車與MEC協同交互”“多車與MEC及路側智能設施協同交互”四大類,如圖2所示。對于每一大類場景,本白皮書會對其中的具體應用場景進行描述,并在場景小結中對各個應用場景中MEC的能力需求進行歸納總結。
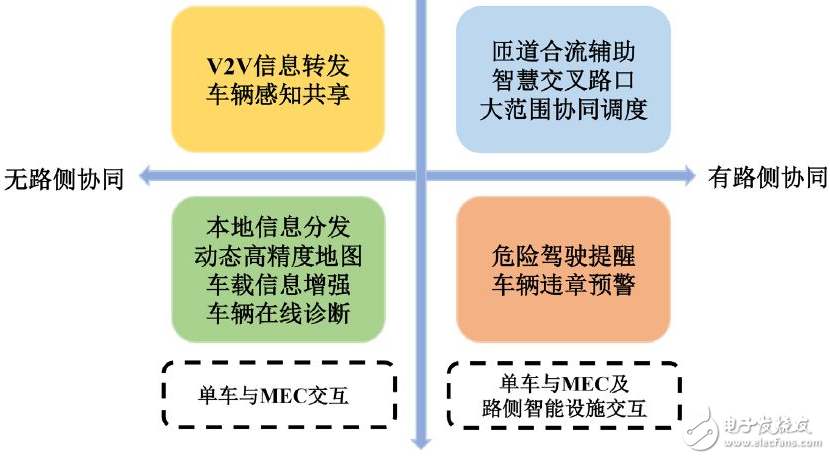
圖2 MEC與C-V2X融合場景分類
單車與MEC交互場景
1 場景概述
在C-V2X應用中,本地信息分發(fā)、動態(tài)高精度地圖、車載信息增強、車輛在線診斷等功能通過單車與MEC進行交互即可實現。應用場景如圖3所示:
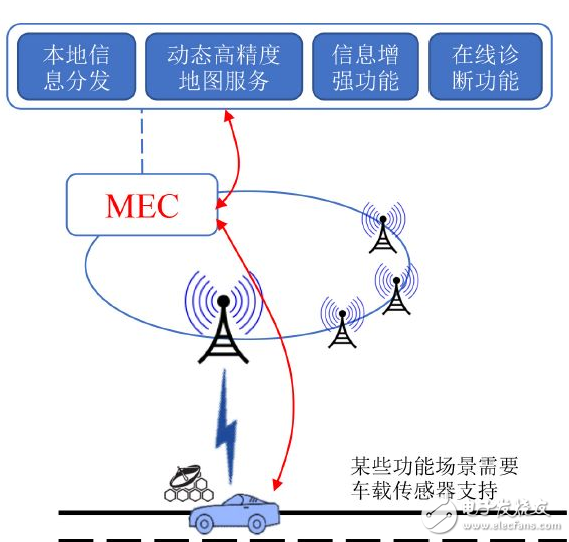
圖3 單車與MEC交互場景示意圖
2 本地信息分發(fā)
MEC作為內容分發(fā)的邊緣節(jié)點,實現在線分發(fā)和流量卸載的功能。可為車輛提供音視頻等多媒體休閑娛樂信息服務、區(qū)域性商旅餐飲等信息服務,或提供軟件/固件升級等服務。
在此類場景中,MEC的部署位置可根據接入用戶數和服務流量靈活選擇,通常可選擇部署在RSU或基站的匯聚節(jié)點后,為相對較大的范圍提供服務。車輛無需裝配智能傳感器等設備,在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
3 動態(tài)高精度地圖
MEC可以存儲動態(tài)高精度地圖車輛分發(fā)高精度地圖信息,減少時延并降低對核心網傳輸帶寬的壓力。在應用中,車輛向MEC發(fā)送自身具體位置以及目標地理區(qū)域信息,部署在MEC的地圖服務提取相應區(qū)域的高精度地圖信息發(fā)送給車輛。當車輛傳感器檢測到現實路況與高精度地圖存在偏差時,可將自身傳感信息上傳至MEC用于對地圖進行更新,隨后MEC的地圖服務可選擇將更新后的高精度地圖回傳至中心云平臺。
在此類場景中,MEC提供存儲高精度地圖能力、用于動態(tài)地圖更新的計算能力,同時提供與中心云的交互能力。在網絡部署了MEC及相應的功能服務后,車輛可利用對應的通信模組使用此類應用服務,在車輛具備智能傳感器時,可以通過上傳自身傳感信息對地圖進行更新。
4 車載信息增強
MEC提供車載信息增強功能,車輛可將車載傳感設備感知的視頻/雷達信號等上傳至MEC,MEC通過車載信息增強功能提供的視頻分析、感知融合、AR合成等多種應用實現信息增強,并將結果下發(fā)至車輛進行直觀顯示。
在此類場景中,MEC提供用于視頻分析、感知融合、AR合成等多個應用的計算能力,同時提供低時延、大帶寬的通信能力。在網絡部署了MEC及相應的功能服務后,車輛需裝配智能傳感器及顯示設備,并利用對應的通信模組實現數據上傳和下載。
5 車輛在線診斷
MEC可支持自動駕駛在線診斷功能。當車輛處于自動駕駛狀態(tài)時,可將其狀態(tài)、決策等信息上傳至MEC,利用在線診斷功能對實時數據樣本進行監(jiān)控分析,用于試驗、測試、評估或應對緊急情況處理。同時MEC可定期將樣本及診斷結果匯總壓縮后回傳中心云平臺。
在此場景中,MEC提供支持實時處理大量數據的計算能力、數據存儲能力和低時延的通信能力,同時提供與中心云的交互能力。在網絡部署了MEC及相應的功能服務后,車輛需將自身傳感、決策、控制信息通過對應的通信模組上傳至MEC。
6 場景小結
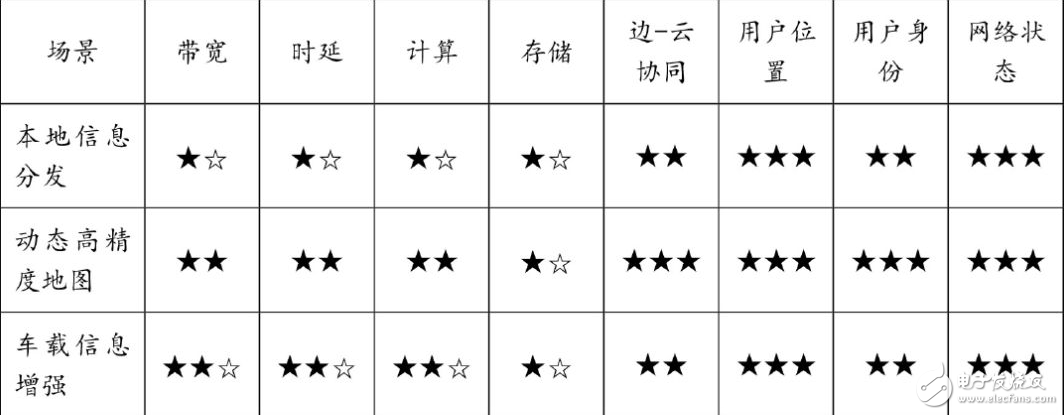
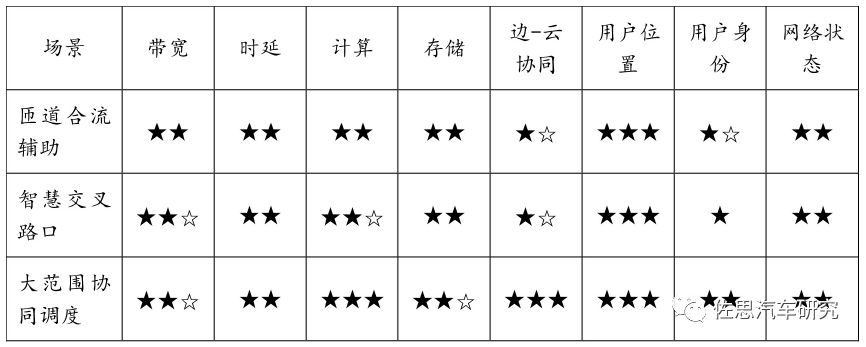
本白皮書對每一大類場景中具體應用場景對MEC的能力要求按照“帶寬”、“時延”、“計算”、“存儲”、“邊-云協同”、“用戶位置”、“用戶ID”、“網絡狀態(tài)”等8個子項進行了分類統(tǒng)計。統(tǒng)計結果定性的以星級進行描述,★代表1星,☆代表半星,每個要求子項的定義為:
● 帶寬:★代表10Mbps以下,★★代表10~100Mbps,★★★代表100Mbps以上;
● 時延: ★ 代表100ms以上, ★ ★ 代表20~100ms,★★★代表20ms以下;
● 計算:★代表支持信號控制級計算能力,★★代表支持圖像處理級計算能力,★★★代表需要支持智能決策、視頻編解碼、大數據分析類計算能力;
● 存儲:★代表TB級存儲或支持內存數據庫,★★代表PB級或支持結構性、關系型數據庫,★★★代表EB級或支持海量非結構性數據庫;
● 邊-云協同/用戶位置/用戶ID/網絡狀態(tài):從零星至★★★分別代表了統(tǒng)計意義上對該要求的需求程度,零星表示完全不需要,★★★表示完全必需。
在單車與MEC交互場景中,車輛與部署在MEC上的服務進行交互,無需路側智能設施及其他車輛參與。在此類場景中,各具體應用場景對MEC的能力要求如表1。
表1 單車與MEC交互場景對MEC的能力要求
單車與MEC及路側智能設施交互場景
1 場景概述
在C-V2X應用中,危險駕駛提醒、車輛違章提醒等功能可通過單車、路側智能設施及MEC進行交互實現。應用場景如圖4所示:
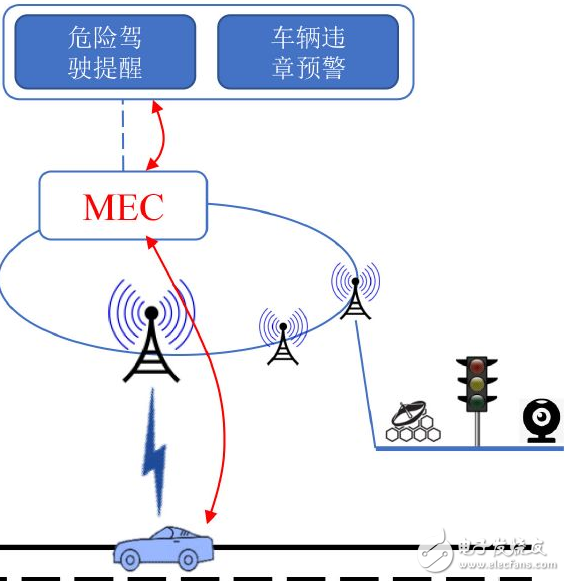
圖4 單車與MEC及路側智能設施交互場景示意圖
2 危險駕駛提醒
MEC部署了危險駕駛提醒功能后,可結合路側智能設施,通過車牌識別等功能分析車輛進入高速的時間,定期為車輛提供疲勞駕駛提醒;或在夜間通過視頻分析,提醒車輛正確使用燈光;或在感知到突發(fā)車輛事故時,提醒附近車輛謹慎駕駛;或在天氣傳感器感知到高溫“鏡面效應”、雨雪大霧等惡劣天氣時,提醒車輛安全駕駛。此外,MEC可階段性地將危險駕駛信息匯總后上傳中心云平臺。
在此場景中,路側的各類傳感設施實時將感知信息上傳至MEC,MEC主要提供用于視頻分析、感知融合、事件與消息整合等計算能力,保證傳感信息傳輸的通信帶寬,以及與中心云平臺進行交互的能力,同時也應提供對跨基站、跨MEC業(yè)務連續(xù)性的必要支持。車輛無需裝配智能傳感器等設備,在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
3 車輛違章預警
MEC部署了車輛違章預警功能后,可結合路側智能設施,通過視頻識別、雷達信號分析等應用實現車牌識別,并對超速、逆行、長期占據應急車道等違章行為判定,并將違章預警信息下發(fā)對應車輛,提醒車輛遵守交通規(guī)則行駛。此外,MEC可階段性將違章信息匯總后上傳中心云平臺。在此場景中,路側的攝像頭、雷達等智能設施實時將感知信息上傳至MEC,MEC主要提供支持視頻分析、信號處理、違章判定功能等計算能力,保證傳感信息傳輸的通信帶寬,以及與中心云平臺進行交互的能力。在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
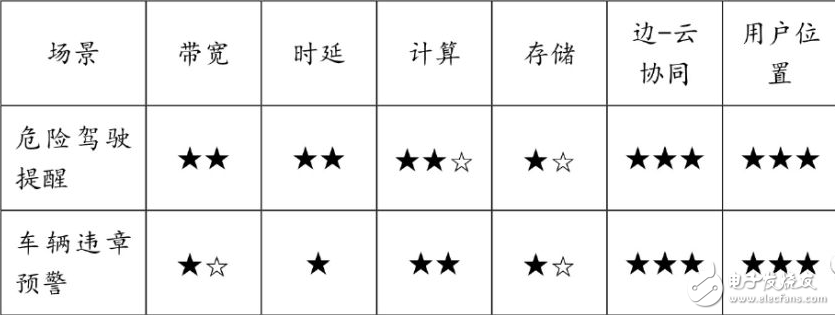
4 場景小結
在單車與MEC及路側智能設施交互的場景中,車輛、路側智能設施與部署在MEC上的服務進行交互,無需其他車輛參與。典型場景對MEC的能力要求如表2。
表2 單車與MEC及路側智能設施交互場景對MEC能力要求
多車與MEC協同交互場景
1 場景概述
在C-V2X應用中,V2V信息轉發(fā)、車輛感知共享等功能可通過多車與MEC協同交互實現。應用場景如圖5所示:
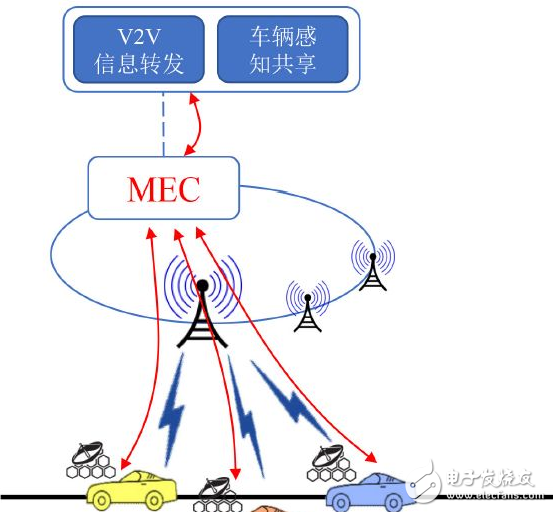
圖5 多車與MEC協同交互場景示意圖
2 V2V信息轉發(fā)
MEC部署了V2X信息轉發(fā)功能后,可作為橋接節(jié)點,以V2N2V的方式實現車與車之間的通信,實時交流車輛位置、速度、方向及剎車、開啟雙閃等車輛狀態(tài)信息,提升道路安全。
在此場景中,車輛無需裝備PC5通信模組,可通過Uu接口將車輛狀態(tài)信息發(fā)送至MEC,并接收MEC下發(fā)的其他車輛信息。MEC應提供超低時延的信息傳輸功能。
3 車輛感知共享
MEC部署車輛感知共享功能,可將具備環(huán)境感知車輛的感知結果轉發(fā)至周圍其他車輛,用于擴展其他車輛的感知范圍。也可以用于Seethrough場景,及當前車遮擋后車視野時,前車對前方路況進行視頻監(jiān)控并將視頻實時傳輸至MEC,MEC的車輛感知共享功能對收到的視頻進行實時轉發(fā)至后方車輛,便于后方車輛利用視頻擴展視野,有效解決汽車行駛中的盲區(qū)問題,提高車輛的駕駛安全。
在此場景中,MEC提供傳感信息、視頻流等信息的轉發(fā)功能,需要保證低時延、大帶寬的通信能力。在See-Through 應用場景中,需要對跨基站、跨MEC的業(yè)務連續(xù)性提供必要支持。配置了車載傳感器/攝像頭和C-V2X通信模組的車輛可向其他車輛共享自身傳感信息,僅配置通信模組的車輛可接收其他車輛共享的傳感信息。
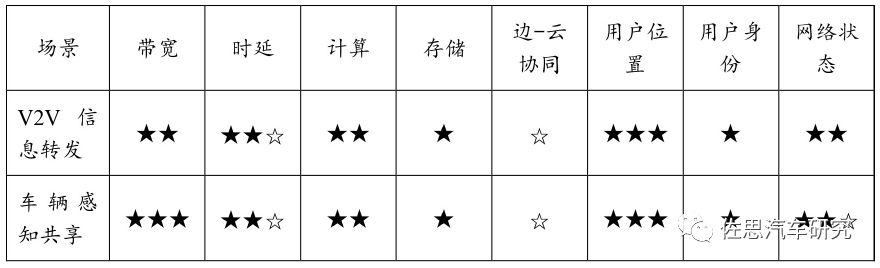
4 場景小結
在多車與MEC協同交互場景中,多個車輛與部署在MEC上的服務進行交互,無需路側智能設施參與。典型場景對MEC的能力要求如表3。
表3 多車與MEC協同交互場景對MEC能力要求
多車與MEC及路側智能設施協同交互場景
1 場景概述
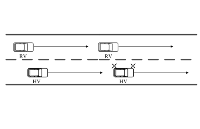
在C-V2X應用中,匝道合流輔助、智慧交叉路口、大范圍協同調度等功能可通過多車、路側智能設施及MEC進行協同交互實現。應用場景如圖6所示:
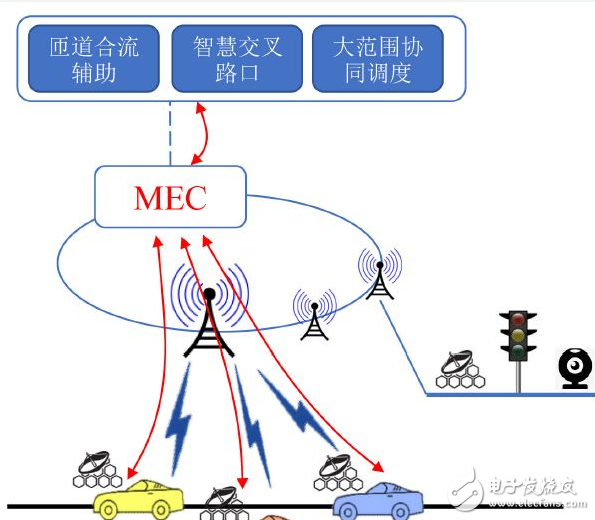
圖6 多車與MEC及路側智能設施協同交互場景示意圖
2 匝道合流輔助
MEC部署匝道合流輔助功能,在匝道合流匯入點部署監(jiān)測裝置(如攝像頭)對主路車輛和匝道車輛同時進行監(jiān)測,并將監(jiān)測信息實時傳輸到MEC,同時相關車輛也可以將車輛狀態(tài)信息發(fā)送至MEC,MEC的匝道合流輔助功能利用視頻分析、信息綜合、路況預測等應用功能對車、人、障礙物等的位置、速度、方向角等進行分析和預測,并將合流點動態(tài)環(huán)境分析結果實時發(fā)送相關車輛,提升車輛對于周邊環(huán)境的感知能力,減少交通事故,提升交通效率。
在此場景中,MEC提供用于監(jiān)測信息分析及環(huán)境動態(tài)預測的計算能力,以及低時延、大帶寬的通信能力。車輛可通過Uu通信模式與MEC直接交互,或通過PC5通信模式經RSU與MEC進行交互。
3 智慧交叉路口
MEC部署智慧交叉路口功能,交叉路口處的路側智能傳感器(如攝像頭、雷達等)將路口處探測的信息發(fā)送至MEC,同時相關車輛也可以將車輛狀態(tài)信息發(fā)送至MEC。MEC的智慧交叉路口功能通過信號處理、視頻識別、信息綜合等應用功能對交叉路口周邊內的車輛、行人等位置、速度和方向角等進行分析和預測,并將分析結果實時發(fā)送至相關車輛,綜合提升車輛通過交叉路口的安全性和舒適性;同時MEC的可以通過收集和分析相關信息,對交通信號燈各相位配時參數進行優(yōu)化,提高交叉路口的通行效率。
在此場景中,MEC提供用于路側感知信息分析及路況動態(tài)預測的計算能力,以及低時延、大帶寬的通信能力。車輛可通過Uu通信模式與MEC直接交互,或通過PC5通信模式經RSU與MEC進行交互。
4 大范圍協同調度
MEC部署大范圍協同調度功能,可在重點路段、大型收費口處借助視頻傳感信息,通過MEC進行路況分析和統(tǒng)一調度,實現一定范圍內大規(guī)模車輛協同、車輛編隊行駛等功能。或在城市級導航場景中,MEC根據區(qū)域車輛密度、道路擁堵嚴重程度、擁堵節(jié)點位置以及車輛目標位置等信息,利用路徑優(yōu)化的算法對車輛開展導航調度,避免擁堵進一步惡化。
在此場景中,MEC收集多種傳感信息及大量車輛狀態(tài)信息,提供海量數據處理、綜合路徑規(guī)劃等計算能力,提供各類綜合信息的存儲能力,并提供與中心云平臺進行交互的能力。此外,在大范圍導航規(guī)劃應用中,MEC還應提供對跨基站、跨MEC業(yè)務連續(xù)性的必要支持。MEC的部署位置可根據接入用戶數和服務范圍靈活選擇。在網絡部署了MEC及相應的功能服務后,具備對應通信模組的車輛可以直接使用此類服務。
5 場景小結
在多車與MEC及路側智能設施交互場景中,多個車輛、路側智能設施與部署在MEC上的服務進行交互。典型場景對MEC的能力要求如表4。
表4 多車與MEC及路側智能設施協同交互場景對MEC能力要求
未來工作
在未來工作中,工作組將從以下幾方面開展工作,持續(xù)推動MEC與C-V2X融合發(fā)展。
一是推動從時延、帶寬、計算能力、存儲資源、開放與協同能力、移動性支持等指標對MEC能力進行簡單參考性分級,以加強應用場景需求與MEC網絡或硬件能力的對應與匹配,推進MEC與C-V2X融合場景分步應用與發(fā)展。
二是推動MEC與C-V2X融合的標準化工作,規(guī)范數據接口與服務流程,積極聯合產業(yè)各方主體共同開展測試床建設,為MEC與C-V2X融合的場景功能、平臺性能、應用部署等提供測試環(huán)境,盡快開展解決方案的驗證性測試,并利用測試結果對未來技術與產業(yè)的發(fā)展提供支撐。
三是持續(xù)開展深入研究,從技術與標準化方案、產業(yè)現狀與趨勢、商業(yè)模式等角度進一步深入探討MEC與C-V2X融合的發(fā)展路線,并進行總結和成果輸出。
-
MEC
+關注
關注
0文章
116瀏覽量
19533 -
C-V2X
+關注
關注
2文章
111瀏覽量
13190
原文標題:MEC與C-V2X融合應用場景
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
C-V2X前裝上車迎來爆發(fā)期!芯片、模組大廠進擊,跨界融合推進車聯網創(chuàng)新

Qualcomm發(fā)布 C-V2X 商用解決方案
車聯網C-V2X的概述和國際國內發(fā)展基礎和現狀及國內C-V2X發(fā)展建議
C-V2X 技術介紹 精選資料推薦
5分鐘成為車聯網專家|如何實現C-V2X技術突破把住車聯網發(fā)展命門 精選資料分享
MEC與C-V2X融合應用場景

基于C-V2X實現“聰明的車”+“智慧的路”方式實現智能交通和自動駕駛
R16為C-V2X提供清晰的演進路徑
車聯網滿足客戶全部C-V2X射頻協議相關測試要求
簡單認識C-V2X
C-V2X在未來車載通信的應用場景
解析C-V2X車聯網的發(fā)展趨勢
大話中國C-V2X通訊標準應用層標準





 工商網監(jiān)
工商網監(jiān)
評論