 淺析芯片中PLL中的相位噪聲
淺析芯片中PLL中的相位噪聲
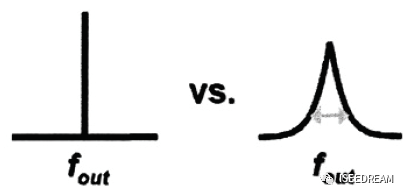
相位噪聲就是信號在相位上的噪聲。準確的講是指時鐘信號相對于其載波頻率的頻率成分的變化量,它是關于載波頻率偏移量的函數。相位噪聲是時鐘抖動的頻域表示,圖下圖所示為相位噪聲示意圖。
時鐘抖動
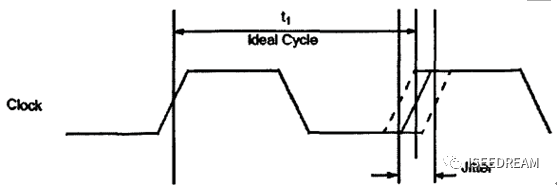
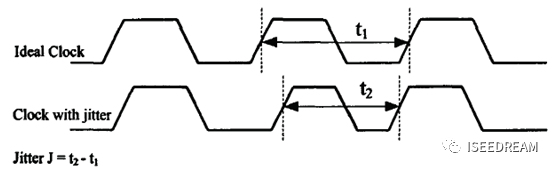
時鐘抖動是指實際輸出時鐘信號相對于理想信號任何相應邊沿偏移的時間長度。而實際的跳變沿可以超前或者滯后其理想位置.一般可以用時間的絕對值或者頻率的百分比作為抖動的衡量單位。下圖所示為時鐘抖動示意圖。
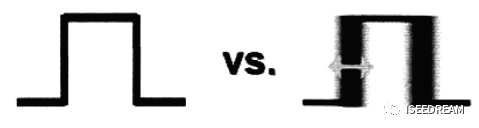
導致抖動的原因有電源噪聲,晶體管的熱噪聲和閃爍噪聲,村底噪聲以及輸入時鐘信號的反射和EMI等。時鐘抖動時相位噪聲的時域表示。
抖動一般分為三類:相位抖動,周期抖動和周期.周期抖動,且不同類型抖動的特性和測量方法均不同。
相位抖動
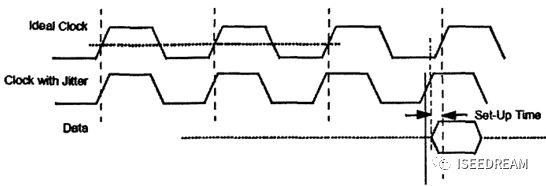
相位抖動是指實際輸出時鐘信號的跳變沿偏離其理想位置的時間長度,它可以用頻譜分析儀來測量。下圖所示為相位抖動定義的示意圖。
這種抖動很重要,在基于微處理器的系統中,處理囂需要2ns的數據建立時間,如果驅動時鐘的相位抖動最大值是2 5ns時,時鐘的上升沿有可能在數據有效前進行采樣,那么就采樣到錯誤的數據,如下圖所示。
周期抖動
周期抖動是指實際時鐘信號的周期同理想時鐘周期的差值。它可以被任何示波器測量到。這種抖動是很重要,因為它定義了輸出時鐘頻率的最大和最小值,即時鐘周期的最大和最小值。下圖所示為周期抖動定義的示意圖。
周期-周期抖動
周期-周期抖動是指輸出時鐘信號當前周期同前一個周期大小的差值,這種抖動很難測量,需要時序間隔分析器(Timing Interval Analyzer)測量。下圖為周期-周期抖動定義的示意圖,Jl和J2是測量的抖動值。
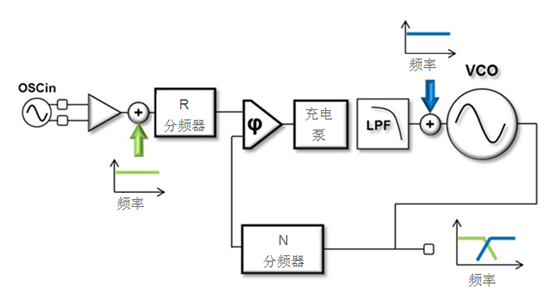
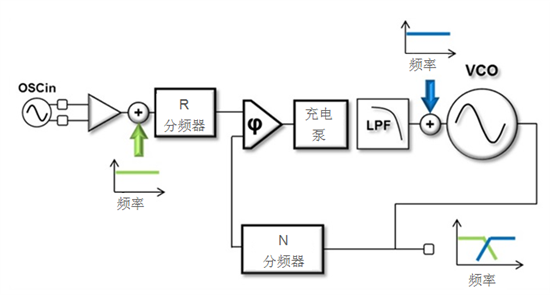
PLL工作狀態
鎖相環有四種工作狀態,即鎖定狀態、失鎖狀態、捕獲過程和跟蹤過程。
(1)鎖定狀態:整個環路已經達到輸入信號相位的穩定狀態。它指輸出信號相位等于輸入信號相位或者是兩者存在一個固定的相位差,但頻率相等。在鎖定狀態時,壓控振蕩器的電壓控制信號接近平緩。
(2)失鎖狀態:環路的反饋信號與鎖相環輸入信號的頻率之差不能為零的穩定狀態,或是在無限時間范圍內不停振蕩無法達到鎖定的狀態,它們都稱為失鎖狀態。當環路的結構設計有問題,或者是輸入信號超出了鎖相環的應用范圍的時候都會進入失鎖狀態。這個狀態意味著環路沒有正常工作。
(3)捕獲過程:指環路由失鎖狀態進入鎖定狀態的過程。這個狀態表明環路已經開始進入正常工作,但是還沒有達到鎖定的穩態。此過程應該是一個頻率和相位誤差不斷減小的過程。
(4)跟蹤過程:是指在PLL環路處于鎖定狀態時,若此時輸入信號頻率或相位因其它原因發生變化,環路能通過自動調節,來維持鎖定狀態的過程。由于輸入信號頻率或者相位的變化引起的相位誤差一般都不大,環路可視作線性系統。
一般用四個參數指標來描述PLL的系統頻帶性能:
(1)同步帶:它指的是環路能保持靜態鎖定狀態的頻率范圍。當環路鎖定時,逐步增大輸入頻率,環路最終都能保持鎖定的最大輸入固有頻差。
(2)失鎖帶:鎖相環路穩定工作時的動態極限。也就是說PLL在穩定工作狀態時,輸入信號的跳變要小于這個參數,PLL才能快速鎖定。若輸入信號的跳變大于該參數而小于捕捉帶,則環路還是能鎖定,但是需要較長的時間。
(3)捕獲帶:只要反饋信號和輸入信號的頻差在這一范圍內,環路總會通過捕獲而再次鎖定,隨著捕獲過程的進行,反饋信號的頻率向著輸入信號頻率方向靠近,經過一段時間后,環路進入快捕帶過程,最終達到鎖定。
(4)快捕帶:在此頻差范圍內,環路不需要經歷周期跳躍就可達到鎖定,實現捕獲過程。
對于簡單的PLL來說,上面的四個參數的量化關如下圖所示。
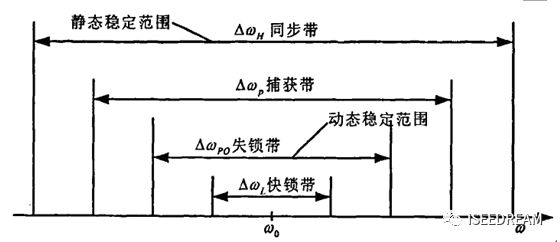
由上圖可見,同步帶比其它三個頻帶要寬的多,而捕獲帶則要大于快捕帶,并且大多數情況下捕獲帶也比失鎖帶。
PLL捕獲過程簡單總結:
捕獲帶是PLL總會變為鎖定的范圍,但這個過程有時相當慢。
快鎖帶是PLL在參考頻率與輸出頻率之間的一個差拍內鎖定的頻率范圍,通常PLL的工作頻率范圍限制在快捕帶內。
同步帶是PLL能夠在靜態保持相位跟蹤的頻率范圍。
失鎖帶是PLL穩定工作的動態范圍,如果在這個范圍內失去跟蹤,通常PLL會再次鎖定,但如果是捕捉過程,則這個過程是緩慢的。
-
噪聲
+關注
關注
13文章
1121瀏覽量
47400 -
pll
+關注
關注
6文章
776瀏覽量
135136
原文標題:行業 | 設計干貨,芯片中PLL中相位噪聲基本介紹
文章出處:【微信號:wc_ysj,微信公眾號:旺材芯片】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

如何根據基本的數據表規格估算出PLL的相位噪聲
如何在PLL輸出端產生最低的相位噪聲?
如何根據基本的數據表規格估算出PLL的相位噪聲





 工商網監
工商網監
評論