 如何實現PID回路的最優性能
如何實現PID回路的最優性能
在工業自動化行業,盡管大部分人將比例-積分-微分 (PID) 算法作為閉環過程控制的事實標準,但優化PID回路以達到最優性能的最佳方法,仍然沒有達成共識。這些實踐在概念上很簡單:選擇用于定義總體控制量的比例、積分和微分的相對大小的增益、速率和重置參數。
在實踐中,回路整定與其說是科學,不如說是藝術。優化參數的最佳選擇取決于各種因素,包括受控過程的動態行為、運行人員確定的性能目標以及運行人員對調節工作方式的理解。已經開發了各種手動技術,來幫助運行人員調整其回路,但即使在專業軟件的幫助下,回路整定也可能是一項艱難而耗時的差事。
“自動整定”或“自整定”PID控制器旨在簡化問題,方法是根據對受控過程行為的某種自動分析來選擇自己的調節參數。這些自動過程,通常涉及過程輸入/輸出之間關系的數學模型,經驗豐富的運行人員提供的信息可以改進這些數學關系 (參見圖 1)。
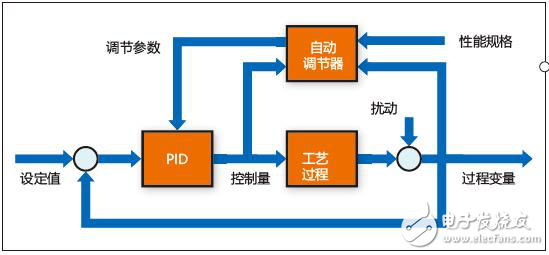
圖 1:自動調節PID 控制器,通過測量過程輸入 (控制量) 和輸出 (過程變量),然后更新其自己的調節參數,以滿足運行人員對閉環性能的要求。
“自整定” 指的是那些在控制器在線調節工藝過程時持續執行的程序。"自動整定" 是指控制器處于離線狀態時按需執行的過程。但是,這兩個術語通常互換使用,因為自整定和自動整定控制器都可以自動調整自身。為了簡單起見,在下文中,這兩個詞用"自動調節器"代替 。
步進測試
在調試回路的過程中,自動調節器可以簡單的自動執行操作員可能需要手動執行的調整程序,例如,在控制活動中強制一個波動、觀察結果并相應調整參數。但是,自動調節器在執行這些步驟時會有所不同。
例如,最基本的自動調節器可以執行經典的“步進測試”或“階躍測試”,在這種情況下,控制工作會以循序漸進的方式改變,并禁用反饋。從理論上講,該過程對階躍輸入的響應,將提供足夠的信息來表征過程的動態行為,這反過來又會決定調節參數。然而在實踐中,對于那些在所有時間內必須將過程變量波動降至最低的應用中,僅僅為了調節控制器而為過程引入階躍擾動,是不切實際的。
某些自動調節器在執行步進測試時,可以通過響應設定值的變更來避免此類問題。無論如何,進程都會受到干擾,在試圖推動過程變量向新設定值變化的過程中,控制器可以承擔在進程中較小的階躍變化。
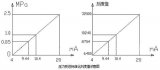
例如,當運行人員請求更改設定值時,控制器應施加100% 的控制量 (正步驟),然后在過程變量到達新設定值 (負步驟) 之前關閉。然后,控制器就會檢測到過程變量中的波動,以確定過程行為的數學模型(請參閱圖2 中所示的步進測試)。
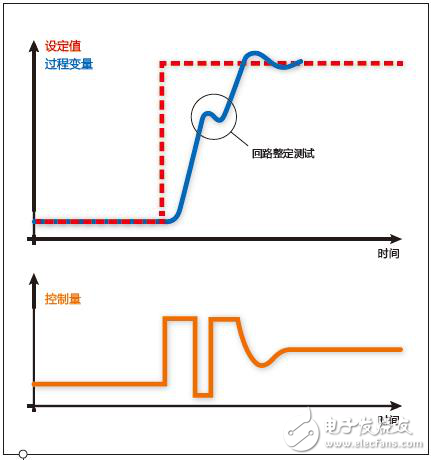
圖 2:對于某些應用程序,如果該過程以可預測的方式運行,那么設定值的微小變化,就足以識別過程行為。執行設定值響應測試的自動調節器,會中斷控制器對設定值更改的初始響應,以進行兩步測試:一個正向測試和一個負向測試。在過程變量完成一個完整變化之后,自動調節器就可以計算出一組新的調節參數,然后重新激活PID算法。當過程變量達到設定值時,控制器已經被調整到運行人員期望的閉環控制,這涉及到回路的上升時間、過沖率、建立時間等因素。
過程的時間常數可以推導出來,或者用從控制器關機到過程變量開始下降之間的時間間隔。然后,可以使用任意的優化規則以及運行人員對閉環性能的偏好,從進程死區時間、增益和時間常數來計算相應的 PID 參數。優化完成后,控制器可以恢復正常的閉環控制操作,將過程變量繼續調節到設定值。
噪聲和擾動
盡管概念簡單,但步進測試對自動化來講可能也是一個挑戰。如果在測試過程中,過程變量發生擾動,則結果會被扭曲。經驗豐富的運行人員,在執行手動步進測試時,通常可以識別正在發生的干擾,或者等恢復正常后再啟動測試或在必要時重新啟動測試。賦予自動調節器類似的觀察技能則非常難。
當過程變量受測量噪聲的影響時,該問題尤為嚴重。自動調節器并不是總能區分虛假噪聲和真實擾動。即使可以區分,測量噪聲仍可能會破壞響應曲線的精確形狀,從而損壞過程模型的計算。
某些自動調節器可以通過多次執行自動步進測試,然后將結果平均或選擇最常出現的結果來處理測量噪聲。復雜的自動調節器,還可以計算出對過程模型的估計是否能夠適應嘈雜的數據,或者報告它在最新結果中的可信度,或者重復測試,直到達到運行人員定義的置信度。
沒有萬能藥
但自動啟發式調節也有缺點。如果自動調節器經過訓練,無法獲得過程行為模式,或者如果進程以完全意外的方式運行,那么自動調節器就會不知道該做什么。基于模糊邏輯或人工智能的啟發式自動調節器,雖然能記錄運行人員的體驗,可以重新對其進行訓練以識別新模式,但仍然需要經驗豐富的運行人員的幫助,因為在大多數時間,它不能自動完成。
啟發式調優也可能需要很長時間和幾個迭代才能達到最終結果。另外,啟發式自動調節器,在調節參數的度和頻率方面傾向于保守,以免導致過調節。
-
控制器
+關注
關注
112文章
16332瀏覽量
177812 -
PID
+關注
關注
35文章
1472瀏覽量
85480
發布評論請先 登錄
相關推薦
PID回路控制的原理與調試
數控機床的運動控制 怎么快速調出最優PID參數?
二手5720A_租售5720A多功能校準器|Fluke福祿克
基于H∞回路成形的魯棒PID 參數整定
基于FF現場總線的PID控制應用實現


PID理論詳解
求解含儲能裝置的微電網動態最優潮流的對偶半定規劃方法
使用GForce-200PLCCPU222進行PID回路控制的原理與調試





 工商網監
工商網監
評論