 時序分析基礎
時序分析基礎
時序分析基礎
1. 時鐘相關
時鐘的時序特性主要分為抖動(Jitter)、偏移(Skew)、占空比失真(Duty Cycle DistorTIon)3點。對于低速設計,基本不用考慮這些特征;對于高速設計,由于時鐘本身的原因造成的時序問題很普遍,因此必須關注。
1. 時鐘抖動 (clock jitter)
理想的時鐘信號應該是理想的方波,但是現實中的時鐘的邊沿變化不可能是瞬變的,它有個 從低到高 / 從高到低 的變化過程,如圖1所示。

常見的抖動參數有3種:
周期抖動(Period Jitter):
周期抖動率(Period Jitter)測量時鐘輸出傳輸偏離其理想位置的最大偏離。Period Jitter代表周期差抖動的上下邊界。

周期差抖動(cycle-to-cycle Jitter):
周期差抖動率(cycle-to-cycle jitter)是兩個相鄰周期的時間偏差。它總是小于周期抖動(period jitter)

長期抖動(Long-term Jitter):
長期抖動率如下圖(Long-Term Jitter)定義為一個時鐘沿相對于基準周期時鐘沿經過一段時間的延時之后,與其理想位置的偏離。此測量可以捕獲鎖相環低頻周期變化(緩慢的,頻率很低的)。長期抖動對圖形、串行連接通訊系統、打印機和任何光柵掃描操作非常重要。

時鐘抖動的原因就是噪聲。時鐘抖動是永遠存在的,當其大到可以和時鐘周期相比擬的時候,會影響到設計,這樣的抖動是不可接受的。
2. 時鐘偏斜 (clock skew)
時鐘信號要提供給整個電路的時序單元,所以時鐘信號線非常長,并構成分布式的RC網路。它的延時與時鐘線的長度、時序單元的負載電容、個數有關,所以產生所謂的時鐘偏移。時鐘偏移是指同一個時鐘信號到達兩個不同的寄存器之間的時間差值,根據差值可以分為正偏移和負偏移。

時鐘偏移的計算公式: Tskew = Tclk2 - Tclk1
時鐘偏移是永遠存在的,當其大到一定程度會影響電路的時序。解決方法就是在FPGA的設計中讓主要的時鐘信號走全局時鐘網絡。該網絡采用全銅工藝和樹狀結構,并設計了專用時鐘緩沖和驅動網絡,到所有的IO單元、CLB和塊RAM的偏移非常小,可以忽略不計。
3. 占空比失真DCD (Duty Cycle DistorTIon)
即時鐘不對稱,時鐘的脈沖寬度發生了變化。DCD會吞噬大量的時序裕量,造成數字信號的失真,使過零區間偏離理想的位置。DCD通常是由信號的上升沿和下降沿之間時序不同而造成的。
2. 信號扇入/扇出 (fan-in/fan-out)
The number of circuits that can be fed input signals from an output device. 扇出,輸出可從輸出設備輸入信號的電路的數量。
扇出(fan-out)是定義單個邏輯門能夠驅動的數字信號輸入最大量的術語。大多數TTL邏輯門能夠為10個其他數字門或驅動器提供信號。因而,一個典型的TTL邏輯門有10個扇出信號。
在一些數字系統中,必須有一個單一的TTL邏輯門來驅動10個以上的其他門或驅動器。這種情況下,被稱為緩沖器(buf)的驅動器可以用在TTL邏輯門與它必須驅動的多重驅動器之間。這種類型的緩沖器有25至30個扇出信號。邏輯反向器(也被稱為非門)在大多數數字電路中能夠輔助這一功能。
模塊的扇出是指模塊的直屬下層模塊的個數。一般認為,設計得好的系統平均扇出是3或4。一個模塊的扇出數過大或過小都不理想,過大比過小更嚴重。一般認為扇出的上限不超過7。扇出過大意味著管理模塊過于復雜,需要控制和協調過多的下級。解決的辦法是適當增加中間層次。一個模塊的扇入是指有多少個上級模塊調用它。扇人越大,表示該模塊被更多的上級模塊共享。這當然是我們所希望的。但是不能為了獲得高扇人而不惜代價,例如把彼此無關的功能湊在一起構成一個模塊,雖然扇人數高了,但這樣的模塊內聚程度必然低。這是我們應避免的。
設計得好的系統,上層模塊有較高的扇出,下層模塊有較高的扇人。其結構圖像清真寺的塔,上面尖,中間寬,下面小。
3. launch edge
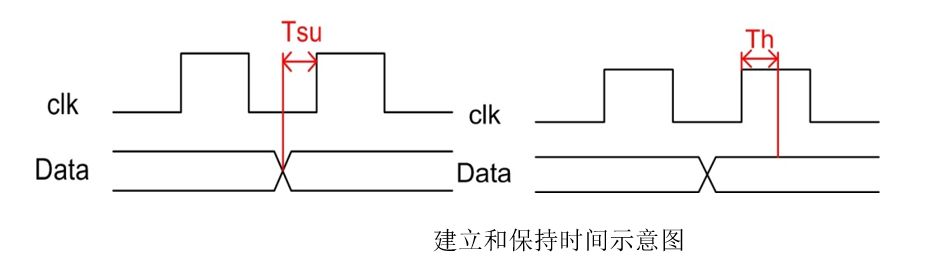
時序分析起點(launch edge):第一級寄存器數據變化的時鐘邊沿,也是靜態時序分析的起點。
4. latch edge
時序分析終點(latch edge):數據鎖存的時鐘邊沿,也是靜態時序分析的終點。
-
時序
+關注
關注
5文章
387瀏覽量
37318 -
時序分析
+關注
關注
2文章
127瀏覽量
22565
發布評論請先 登錄
相關推薦
高密度Interposer封裝設計的SI分析

Verilog vhdl fpga
LM4811在啟動時或者shutdown開啟關閉過程中,增益控制跟預想的有偏差是為什么?

使用MXO58示波器輕松進行電源時序分析
FPGA芯片架構和資源有深入的理解,精通Verilog HDL、VHDL
同步電路和異步電路的優缺點
FPGA 高級設計:時序分析和收斂
Xilinx FPGA編程技巧之常用時序約束詳解
Xilinx FPGA編程技巧之常用時序約束詳解
fpga設計流程
新手入門的簡單小例子-04-1 思路分析
請問一下DC與DCT DCG的區別在哪?





 工商網監
工商網監
評論