") 曠視官方首次解讀2018 COCO全景分割冠軍算法
曠視官方首次解讀2018 COCO全景分割冠軍算法
前言
在計(jì)算機(jī)視覺中,圖像語(yǔ)義分割(Semantic Segmentation)的任務(wù)是預(yù)測(cè)每個(gè)像素點(diǎn)的語(yǔ)義類別;實(shí)例分割(Instance Segmentation)的任務(wù)是預(yù)測(cè)每個(gè)實(shí)例物體包含的像素區(qū)域。全景分割 (Panoptic Segmentation) [1] 最先由 FAIR 與德國(guó)海德堡大學(xué)聯(lián)合提出,其任務(wù)是為圖像中每個(gè)像素點(diǎn)賦予類別 Label 和實(shí)例 ID ,生成全局的、統(tǒng)一的分割圖像。
ECCV 2018 最受矚目的 COCO + Mapillary 聯(lián)合挑戰(zhàn)賽也首次加入全景分割任務(wù),是全景分割領(lǐng)域中最權(quán)威與具有挑戰(zhàn)性的國(guó)際比賽,代表著當(dāng)前計(jì)算機(jī)視覺識(shí)別技術(shù)最前沿。在全景分割比賽項(xiàng)目中,曠視研究院 Detection 組參與了COCO 比賽項(xiàng)目與 Mapillary 比賽項(xiàng)目,并以大幅領(lǐng)先第二名的成績(jī)實(shí)力奪魁,在全景分割指標(biāo) PQ 上取得了0.532的成績(jī),超越了 human consistency ,另外,我們的工作《An End-to-End Network for Panoptic Segmentation》也發(fā)表于 CVPR 2019 上。
接下來(lái)我們將全面解讀全景分割任務(wù),下面這張思維導(dǎo)圖有助于大家整體把握全景分割任務(wù)特性:
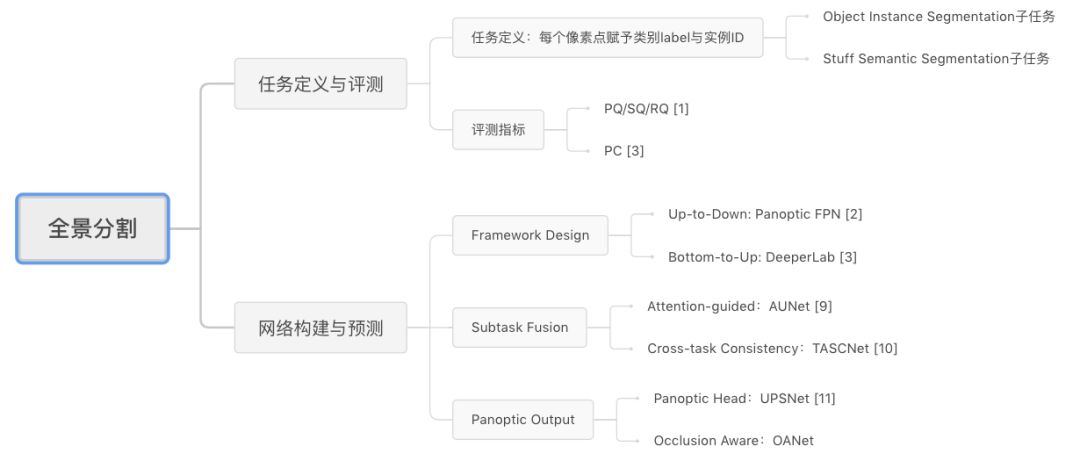
全景分割解讀思維導(dǎo)圖
首先,我們將分析全景分割任務(wù)的評(píng)價(jià)指標(biāo)及基本特點(diǎn),并介紹目前最新的研究進(jìn)展;然后介紹我們發(fā)表于 CVPR 2019 的工作 Occlusion Aware Network (OANet),以及曠視研究院 Detection 組參與的 2018 COCO Panoptic Segmentation 比賽工作介紹;最后對(duì)全景分割當(dāng)前研究進(jìn)行總結(jié)與分析。
任務(wù)與前沿進(jìn)展解讀
全景分割任務(wù),從任務(wù)目標(biāo)上可以分為 object instance segmentation 子任務(wù)與 stuff segmentation 子任務(wù)。全景分割方法通常包含三個(gè)獨(dú)立的部分:object instance segmentation 部分,stuff segmentation 部分,兩子分支結(jié)果融合部分;通常object instance segmentation 網(wǎng)絡(luò)和 stuff segmentation 網(wǎng)絡(luò)相互獨(dú)立,網(wǎng)絡(luò)之間不會(huì)共享參數(shù)或者圖像特征,這種方式不僅會(huì)導(dǎo)致計(jì)算開銷較大,也迫使算法需要使用獨(dú)立的后處理程序融合兩支預(yù)測(cè)結(jié)果,并導(dǎo)致全景分割無(wú)法應(yīng)用在工業(yè)中。
因此,可以從以下幾個(gè)角度分析與優(yōu)化全景分割算法:
(1)網(wǎng)絡(luò)框架搭建;
(2)子任務(wù)融合;
(3)全景輸出預(yù)測(cè);
這三個(gè)問(wèn)題分別對(duì)應(yīng)的是全景分割算法中的三個(gè)重要環(huán)節(jié),下面我們將分別分析這些問(wèn)題存在的難點(diǎn),以及近期相關(guān)工作提出的改進(jìn)方法與解決方案。
全景分割評(píng)價(jià)指標(biāo)
FAIR研究團(tuán)隊(duì) [1] 為全景分割定了新的評(píng)價(jià)標(biāo)準(zhǔn) PQ (panoptic segmentation) 、SQ ( segmentation quality)、RQ (recognition quality) ,計(jì)算公式如下:
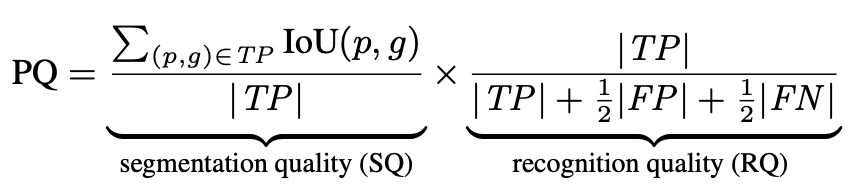
PQ 評(píng)價(jià)指標(biāo)計(jì)算公式
其中,RQ是檢測(cè)中應(yīng)用廣泛的 F1 score,用來(lái)計(jì)算全景分割中每個(gè)實(shí)例物體識(shí)別的準(zhǔn)確性,SQ 表示匹配后的預(yù)測(cè) segment與標(biāo)注 segment 的 mIOU,如下圖所示,只有當(dāng)預(yù)測(cè) segment 與標(biāo)注 segment 的 IOU 嚴(yán)格大于 0.5 時(shí),認(rèn)為兩個(gè) segment 是匹配的。
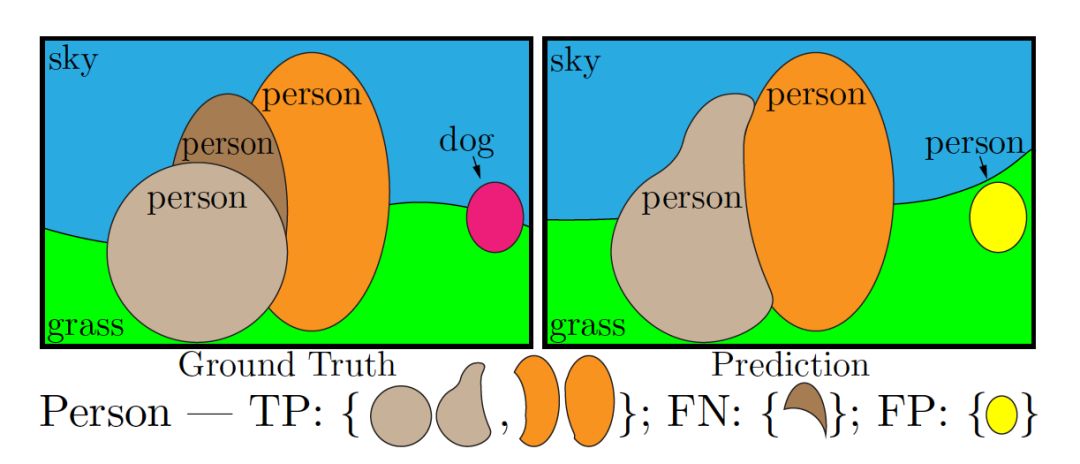
全景分割預(yù)測(cè)結(jié)果與真實(shí)標(biāo)注匹配圖解 [1]
從上面的公式能夠看到,在預(yù)測(cè)與標(biāo)注匹配后的分割質(zhì)量 SQ 計(jì)算時(shí),評(píng)價(jià)指標(biāo)PQ只關(guān)注每個(gè)實(shí)例的分割質(zhì)量,而不考慮不同實(shí)例的大小,即大物體與小物體的分割結(jié)果對(duì)最終的PQ結(jié)果影響相同。Yang et al. [6] 注意到在一些應(yīng)用場(chǎng)景中更關(guān)注大物體的分割結(jié)果,如肖像分割中大圖的人像分割、自動(dòng)駕駛中近距離的物體等,提出了 PC (Parsing Covering) 評(píng)價(jià)指標(biāo),計(jì)算公式如下:
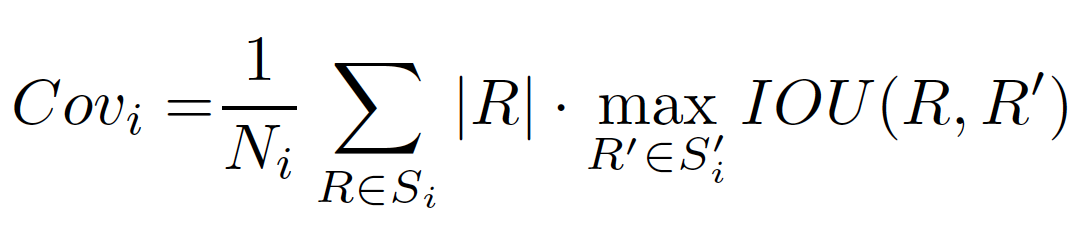
PC 評(píng)價(jià)指標(biāo)計(jì)算公式
其中,

分別表示對(duì)應(yīng)類別的預(yù)測(cè) segments 與真實(shí)segments, 表示對(duì)應(yīng)類別的實(shí)例在真實(shí)標(biāo)注中像素點(diǎn)數(shù)量,
表示對(duì)應(yīng)類別的實(shí)例在真實(shí)標(biāo)注中像素點(diǎn)數(shù)量, 表示類別為i的真實(shí)標(biāo)注像素點(diǎn)總和。通過(guò)對(duì)大的實(shí)例物體賦予更大的權(quán)重,使評(píng)價(jià)指標(biāo)能夠更明顯地反映大物體的分割指標(biāo)。
表示類別為i的真實(shí)標(biāo)注像素點(diǎn)總和。通過(guò)對(duì)大的實(shí)例物體賦予更大的權(quán)重,使評(píng)價(jià)指標(biāo)能夠更明顯地反映大物體的分割指標(biāo)。
網(wǎng)絡(luò)框架搭建
由于 object instance segmentation 子任務(wù)與 stuff segmentation 子任務(wù)分別屬于兩個(gè)不同的視覺預(yù)測(cè)任務(wù),其輸入數(shù)據(jù)及數(shù)據(jù)增強(qiáng)方式、訓(xùn)練優(yōu)化策略與方法、網(wǎng)絡(luò)結(jié)構(gòu)與方法具有較大的不同,如何將兩個(gè)子任務(wù)融合并統(tǒng)一網(wǎng)絡(luò)結(jié)構(gòu)、訓(xùn)練策略,是解決該問(wèn)題的關(guān)鍵。
FAIR 研究團(tuán)隊(duì)提出了一種簡(jiǎn)潔有效的網(wǎng)絡(luò)結(jié)構(gòu) Panoptic FPN [2],在網(wǎng)絡(luò)框架層面將語(yǔ)義分割的全卷積網(wǎng)絡(luò)(FCN)[3] 和實(shí)例分割網(wǎng)絡(luò) Mask RCNN [4] 統(tǒng)一起來(lái),設(shè)計(jì)了單一網(wǎng)絡(luò)同時(shí)預(yù)測(cè)兩個(gè)子任務(wù),網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示。
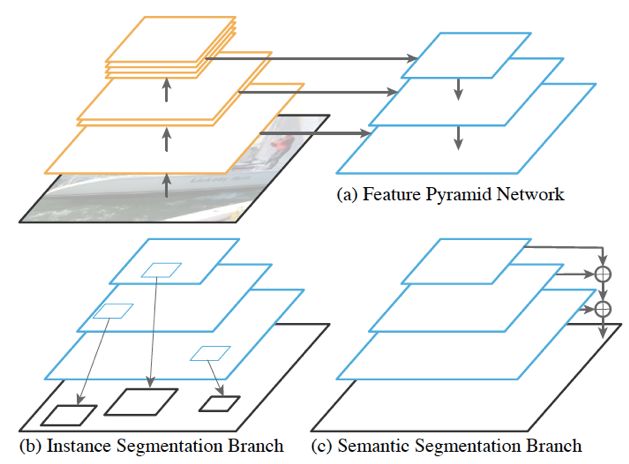
Panoptic FPN網(wǎng)絡(luò)框架圖
該網(wǎng)絡(luò)結(jié)構(gòu)能夠有效預(yù)測(cè) object instance segmentation 子任務(wù)與 stuff segmentation 子任務(wù)。在 Mask RCNN 網(wǎng)絡(luò)與 FPN [5] 的基礎(chǔ)上,作者設(shè)計(jì)了簡(jiǎn)單而有效的 stuff segmentation 子分支:在 FPN 得到的不同層級(jí)的特征圖基礎(chǔ)上,使用不同的網(wǎng)絡(luò)參數(shù)得到相同大小的特征圖,并對(duì)特征圖進(jìn)行加法合并,最后使用雙線性插值上采樣至原圖大小,并進(jìn)行stuff 類別預(yù)測(cè)。
MIT與谷歌等聯(lián)合提出DeeperLab [6] ,使用 bottom-to-up 的方法,同時(shí)實(shí)現(xiàn) object instance segmentation 子任務(wù)與 stuff segmentation 子任務(wù),其網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示:
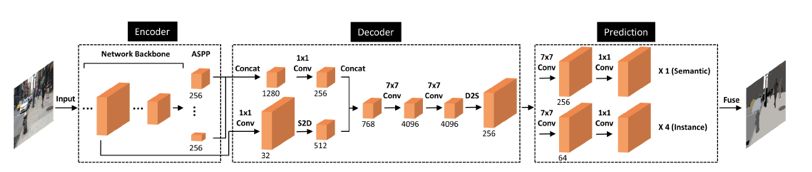
DeeperLab 網(wǎng)絡(luò)結(jié)構(gòu)圖
該網(wǎng)絡(luò)包含了 encoder、decoder 與 prediction 三個(gè)環(huán)節(jié),其中,encoder 和 decoder 部分對(duì)兩個(gè)子任務(wù)均是共享的,為了增強(qiáng) encoder 階段的特征,在 encoder 的末尾使用了ASPP (Atrous Spatial Pyramid Pooling) 模塊 [7];而在decoder階段,首先使用 1×1 卷積對(duì)低層特征圖與 encoder 輸出的特征圖進(jìn)行降維,并使用內(nèi)存消耗較少的space-to-depth [8, 9] 操作替代上采樣操作對(duì)低層特征圖進(jìn)行處理,從而將低層特征圖(大小為原圖1/4)與 encoder 輸出的特征圖(大小為原圖 1/16 )拼接起來(lái);最后,使用兩層 7×7 的大卷積核增加感受野,然后通過(guò) depth-to-space 操作降低特征維度。
為了得到目標(biāo)實(shí)例預(yù)測(cè),作者采用類似 [10, 11, 12] 的使用基于關(guān)鍵點(diǎn)表示的方法,如下圖所示,在 object instance segmentation 子分支頭部,分別預(yù)測(cè)了 keypoint heatmap(圖a)、long-range offset map(圖b)、short-range offset map(圖c)、middle-range offset map(圖d)四種輸出,得到像素點(diǎn)與每個(gè)實(shí)例關(guān)鍵點(diǎn)之間的關(guān)系,并依此融合形成類別不可知的不同實(shí)例,最后得到全景分割的結(jié)果。

object instance segmentation 子分支頭部預(yù)測(cè)目標(biāo)
子任務(wù)融合
雖然通過(guò)特征共享機(jī)制與網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì),能夠?qū)?object instance segmentation 子任務(wù)與 stuff segmentation 子任務(wù)統(tǒng)一起來(lái),但是這兩個(gè)子分支之間的相互聯(lián)系與影響并沒有得到充分的探究,例如:兩個(gè)子分支的任務(wù)是否能夠達(dá)到相互增益或者單向增益的效果?或者如何設(shè)計(jì)將兩個(gè)子分支的中間輸出或者預(yù)測(cè)關(guān)聯(lián)起來(lái)?這一部分問(wèn)題我們可以統(tǒng)一將它稱作兩個(gè)子任務(wù)的相互提升與促進(jìn)。
中科院自動(dòng)化研究所提出了AUNet [13],文中設(shè)計(jì)了 PAM (Proposal Attention Module)與 MAM(Mask Attention Module)模塊,分別基于RPN階段的特征圖與 object instance segmentation 輸出的前景分割區(qū)域,為 stuff segmentation 提供了物體層級(jí)注意力與像素層級(jí)注意力,其網(wǎng)絡(luò)結(jié)構(gòu)圖如下圖所示:
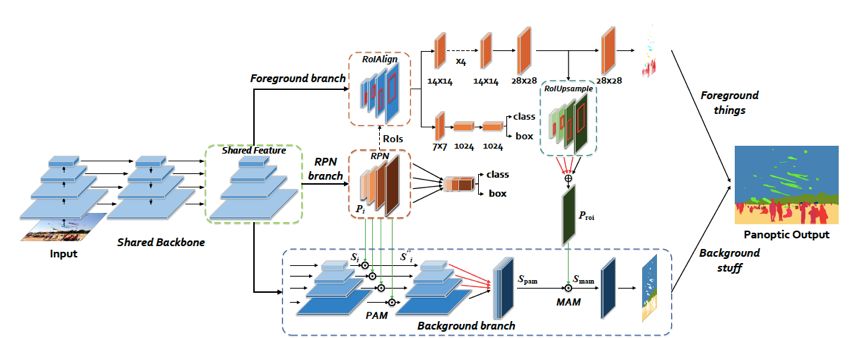
AUNet 網(wǎng)絡(luò)結(jié)構(gòu)圖
為了使 object instance segmentation 的預(yù)測(cè)輸出與 stuff segmentation 預(yù)測(cè)輸出保持一致性,豐田研究院設(shè)計(jì)了 TASCNet [14],其網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示:
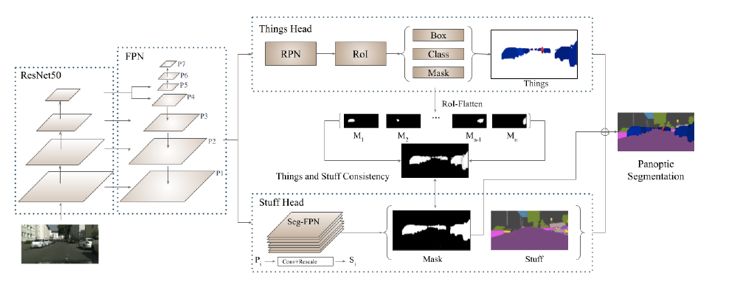
TASCNet網(wǎng)絡(luò)結(jié)構(gòu)圖
網(wǎng)絡(luò)首先將 object instance segmentation 子分支得到的實(shí)例前景掩膜區(qū)域,映射到原圖大小的特征圖中,得到全圖尺寸下的實(shí)例前景掩膜區(qū)域,并與 stuff segmentation 預(yù)測(cè)的實(shí)例前景掩膜進(jìn)行對(duì)比,使用L2損失函數(shù)最小化兩個(gè)掩膜的殘差。
全景輸出預(yù)測(cè)
Object instance segmentation 子分支與 stuff segmentation 子分支的預(yù)測(cè)結(jié)果在融合的過(guò)程中,一般通過(guò)啟發(fā)式算法(heuristic algorithm)處理相沖突的像素點(diǎn),例如簡(jiǎn)單地以 object instance segmentation 子分支的預(yù)測(cè)結(jié)果為準(zhǔn),并以 object instance segmentation 子分支的檢測(cè)框得分作為不同實(shí)例的合并依據(jù)。
這種方式依據(jù)簡(jiǎn)單的先驗(yàn)邏輯判斷,并不能較好地解決全景分割復(fù)雜的合并情況,因此,如何設(shè)計(jì)有效的模塊解決 object instance segmentation 子分支與 stuff segmentation 子分支到全景分割輸出的融合過(guò)程,也是全景分割任務(wù)中的重要問(wèn)題。
Uber與港中文聯(lián)合提出了 UPSNet [15] ,其網(wǎng)絡(luò)結(jié)構(gòu)圖如下圖所示:
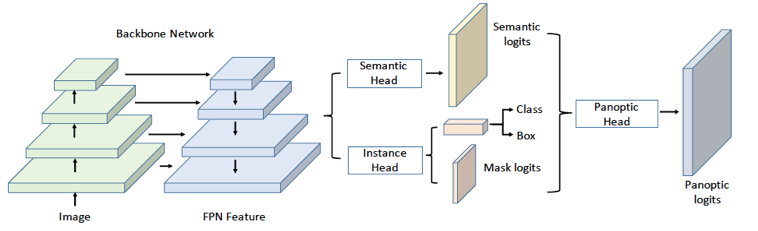
UPSNet網(wǎng)絡(luò)結(jié)構(gòu)圖
將 object instance segmentation 子分支與 stuff segmentation 子分支的輸出通過(guò)映射變換,可得到全景頭部輸出的特征張量,該張量大小為
 為動(dòng)態(tài)變量,表示一張圖像中實(shí)例的數(shù)量,
為動(dòng)態(tài)變量,表示一張圖像中實(shí)例的數(shù)量, 表示 stuff 類別個(gè)數(shù),對(duì)于每張圖像其數(shù)值是相同的,下文使用
表示 stuff 類別個(gè)數(shù),對(duì)于每張圖像其數(shù)值是相同的,下文使用 和
和 分別表示這兩種特征張量。此外,網(wǎng)絡(luò)對(duì)像素進(jìn)行了未知類別的預(yù)測(cè)(Unknown Prediction),從而使得網(wǎng)絡(luò)能夠?qū)⒉糠窒袼攸c(diǎn)判斷為未知類別并在測(cè)試的時(shí)候進(jìn)行忽略,避免做出錯(cuò)誤的類別導(dǎo)致 PQ 指標(biāo)下降。
分別表示這兩種特征張量。此外,網(wǎng)絡(luò)對(duì)像素進(jìn)行了未知類別的預(yù)測(cè)(Unknown Prediction),從而使得網(wǎng)絡(luò)能夠?qū)⒉糠窒袼攸c(diǎn)判斷為未知類別并在測(cè)試的時(shí)候進(jìn)行忽略,避免做出錯(cuò)誤的類別導(dǎo)致 PQ 指標(biāo)下降。
在得到 object instance segmentation 子分支與 stuff segmentation 子分支的輸出后,經(jīng)過(guò)如下圖所示的變換,映射成


panoptic segmentation head示意圖
 可以直接從不規(guī)則類別分割的輸出中提取,
可以直接從不規(guī)則類別分割的輸出中提取,
 個(gè)實(shí)例的掩膜區(qū)域可由
個(gè)實(shí)例的掩膜區(qū)域可由 獲得,其中
獲得,其中 表示第
表示第 個(gè)實(shí)例對(duì)應(yīng)的真實(shí)標(biāo)注框與標(biāo)注類別在 stuff segmentation 子分支輸出截取的掩膜區(qū)域,
個(gè)實(shí)例對(duì)應(yīng)的真實(shí)標(biāo)注框與標(biāo)注類別在 stuff segmentation 子分支輸出截取的掩膜區(qū)域, 表示第?
表示第? 個(gè)實(shí)例對(duì)應(yīng)的 instance segmentation 子分支得到的掩膜區(qū)域映射到原圖的掩膜區(qū)域,最后使用標(biāo)準(zhǔn)的逐像素點(diǎn)的交叉熵?fù)p失函數(shù)對(duì)全景頭部輸出的張量進(jìn)行監(jiān)督訓(xùn)練。
個(gè)實(shí)例對(duì)應(yīng)的 instance segmentation 子分支得到的掩膜區(qū)域映射到原圖的掩膜區(qū)域,最后使用標(biāo)準(zhǔn)的逐像素點(diǎn)的交叉熵?fù)p失函數(shù)對(duì)全景頭部輸出的張量進(jìn)行監(jiān)督訓(xùn)練。
Occlusion Aware Network專欄解讀
論文Arxiv鏈接:
https://arxiv.org/abs/1903.05027
Motivation
在全景分割相關(guān)實(shí)驗(yàn)中,我們發(fā)現(xiàn),依據(jù)現(xiàn)有的啟發(fā)式算法進(jìn)行 object instance segmentation 子分支與 stuff segmentation 子分支的預(yù)測(cè)合并,會(huì)出現(xiàn)不同實(shí)例之間的遮擋現(xiàn)象。為了解決不同實(shí)例之間的遮擋問(wèn)題,我們提出了 Occlusion Aware Network (OANet),并設(shè)計(jì)了空間排序模塊(Spatial Ranking Module),該模塊能夠通過(guò)網(wǎng)絡(luò)學(xué)習(xí)得到新的排序分?jǐn)?shù),并為全景分割的實(shí)例分割提供排序依據(jù)。
網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)
我們提出的端到端的全景分割網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示,該網(wǎng)絡(luò)融合 object instance segmentation 子分支與 stuff segmentation 子分支的基礎(chǔ)網(wǎng)絡(luò)特征,在一個(gè)網(wǎng)絡(luò)中同時(shí)實(shí)現(xiàn)全景分割的訓(xùn)練與預(yù)測(cè)。在訓(xùn)練過(guò)程中,對(duì)于 stuff segmentation 我們同時(shí)進(jìn)行了 object 類別與 stuff 類別的監(jiān)督訓(xùn)練,實(shí)驗(yàn)表明這種設(shè)計(jì)有助于 stuff 的預(yù)測(cè)。

OANet網(wǎng)絡(luò)結(jié)構(gòu)圖
采用一種類似語(yǔ)義分割的方法,我們提出一個(gè)簡(jiǎn)單但非常有效的算法,稱作Spatial Ranking Module,能夠較好地處理遮擋問(wèn)題,其網(wǎng)絡(luò)結(jié)構(gòu)如下所示:
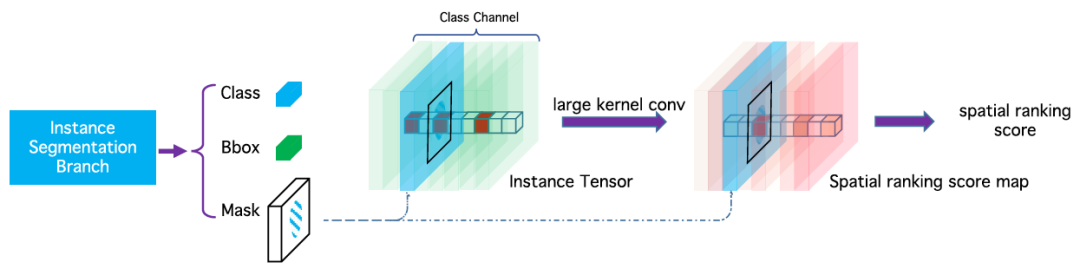
Spatial Ranking Module網(wǎng)絡(luò)結(jié)構(gòu)圖
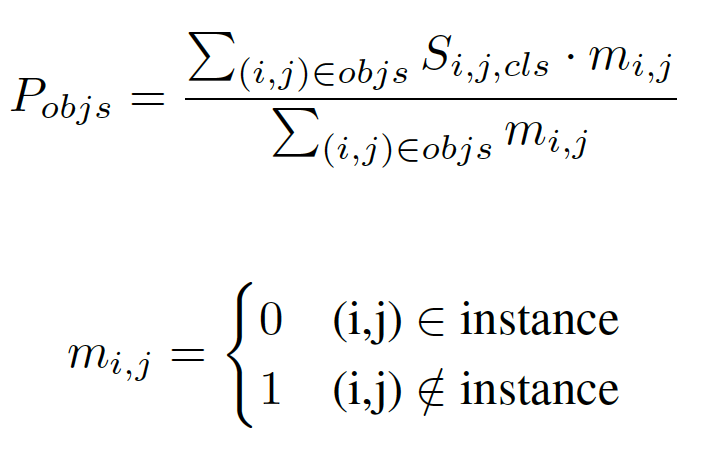
我們首先將輸入的實(shí)例分割結(jié)果映射到原圖大小的張量之中,該張量的維度是實(shí)例物體類別的數(shù)量,不同類別的實(shí)例分割掩膜會(huì)映射到對(duì)應(yīng)的通道上。張量中所有像素點(diǎn)位置的初始化數(shù)值為零,實(shí)例分割掩膜映射到的位置其值設(shè)為1;在得到該張量后,使用大卷積核 [16] 進(jìn)行特征提取,得到空間排序得分圖;最后,我們計(jì)算出每個(gè)實(shí)例對(duì)象的空間排序得分,如下所示:
這里, 表示類別為
表示類別為 的、像素點(diǎn)?
的、像素點(diǎn)? 中的得分值,需要注意的是
中的得分值,需要注意的是 已被歸一化為概率,
已被歸一化為概率, 是掩膜像素點(diǎn)指示符,表示像素點(diǎn)
是掩膜像素點(diǎn)指示符,表示像素點(diǎn) 是否屬于實(shí)例,每個(gè)實(shí)例的空間排序得分由預(yù)測(cè)的掩碼區(qū)域所有像素點(diǎn)的排序分?jǐn)?shù)平均得到,
是否屬于實(shí)例,每個(gè)實(shí)例的空間排序得分由預(yù)測(cè)的掩碼區(qū)域所有像素點(diǎn)的排序分?jǐn)?shù)平均得到, 表示最終得到的每個(gè)實(shí)例的排序得分,并將此得分用于全景輸出。
表示最終得到的每個(gè)實(shí)例的排序得分,并將此得分用于全景輸出。
如下圖所示,若使用目前通用的啟發(fā)式融合算法,即僅基于實(shí)例分割的檢測(cè)框的置信度作為遮擋處理依據(jù),如圖所示,行人檢測(cè)框的置信度要明顯高于領(lǐng)帶檢測(cè)框的置信度,當(dāng)兩個(gè)實(shí)例發(fā)生重疊時(shí),領(lǐng)帶的實(shí)例會(huì)被行人實(shí)例遮擋;當(dāng)加入空間排序得分模塊后,我們通過(guò)該模塊可以預(yù)測(cè)得到兩個(gè)實(shí)例的空間排序分?jǐn)?shù),依據(jù)空間排序分?jǐn)?shù)得到的排序會(huì)更可靠,PQ 會(huì)有更大改善。
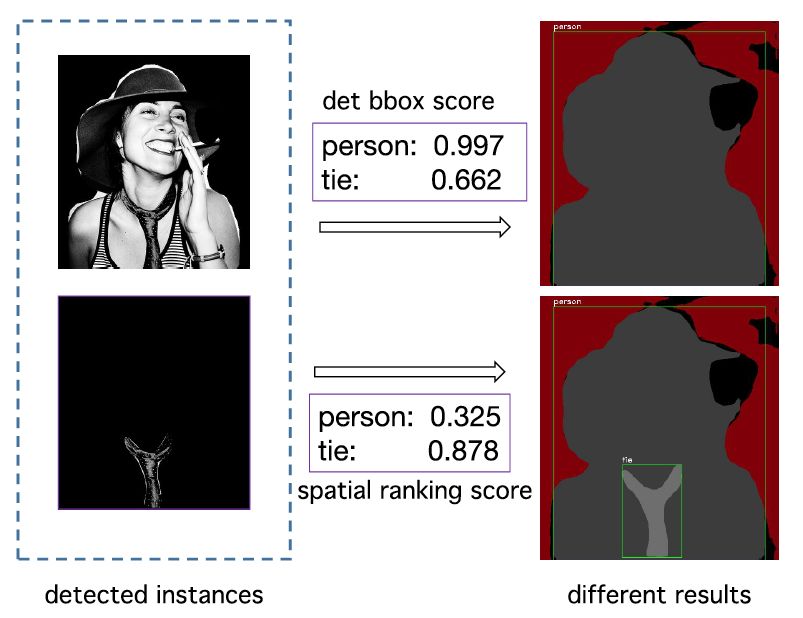
空間排序模塊流程示意圖
實(shí)驗(yàn)分析
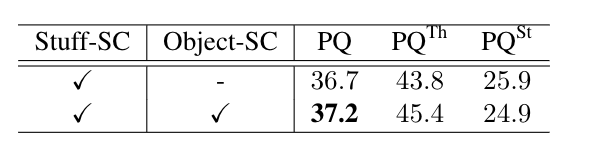
我們對(duì) stuff segmentation 分支的監(jiān)督信號(hào)進(jìn)行了剝離實(shí)驗(yàn),如下表所示,實(shí)驗(yàn)表明,同時(shí)進(jìn)行 object 類別與 stuff 類別的監(jiān)督訓(xùn)練,能夠?yàn)?stuff segmentation 提供更多的上下文信息,并改進(jìn)預(yù)測(cè)結(jié)果。
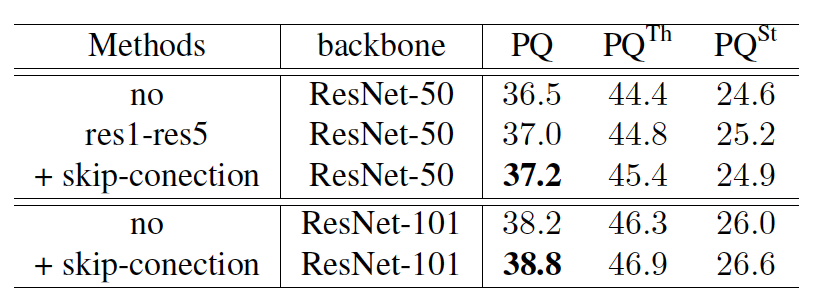
為了探究object instance segmentation 子分支與 stuff segmentation 子分支的共享特征方式,我們?cè)O(shè)計(jì)了不同的共享結(jié)構(gòu)并進(jìn)行實(shí)驗(yàn),如下表所示,實(shí)驗(yàn)表明,共享基礎(chǔ)模型特征與FPN 結(jié)構(gòu)的連接處特征,能夠提高全景分割指標(biāo) PQ 。
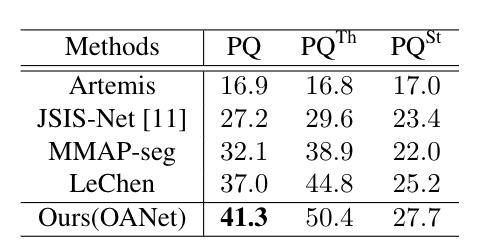
為了探究我們提出的 spatial ranking module 算法的有效性,我們?cè)诓煌A(chǔ)模型下進(jìn)行了實(shí)驗(yàn),如下表所示,其中,w/ spatial ranking module 表示使用我們提出的空間排序模塊得到的結(jié)果,從實(shí)驗(yàn)結(jié)果中可以看到,空間排序模塊能夠在不同的基礎(chǔ)模型下大幅提高全景分割的評(píng)測(cè)結(jié)果。

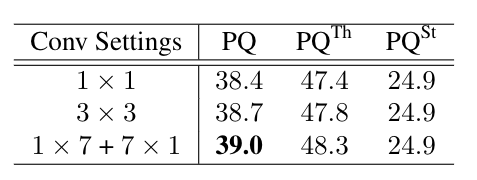
為了測(cè)試不同卷積設(shè)置對(duì)學(xué)習(xí)處理遮擋的影響,進(jìn)行了如下實(shí)驗(yàn),結(jié)果表明,提高卷積的感受也可以幫助網(wǎng)絡(luò)學(xué)習(xí)獲得更多的上下文特征,并取得更好的結(jié)果。
下表是本文提出的算法與現(xiàn)有公開指標(biāo)的比較,從結(jié)果中可以看到,本文提出的算法能夠取得最優(yōu)的結(jié)果。
2018 COCO 全景分割比賽冠軍解讀
曠視研究院 Detection 組參與的全景分割 COCO 比賽項(xiàng)目與 Mapillary 比賽項(xiàng)目中,以大幅領(lǐng)先第二名的成績(jī)實(shí)力奪魁,在全景分割指標(biāo) PQ 上取得了 0.532 的成績(jī),超越了 human consistency 。

COCO 2018 Panoptic Leaderboard
全景分割預(yù)測(cè)可視化圖例
在比賽中,我們使用了如下圖所示的流程,首先分別預(yù)測(cè) stuff semantic segmentation 與 object instance segmentation,然后通過(guò)后處理的操作得到全景分割的結(jié)果。
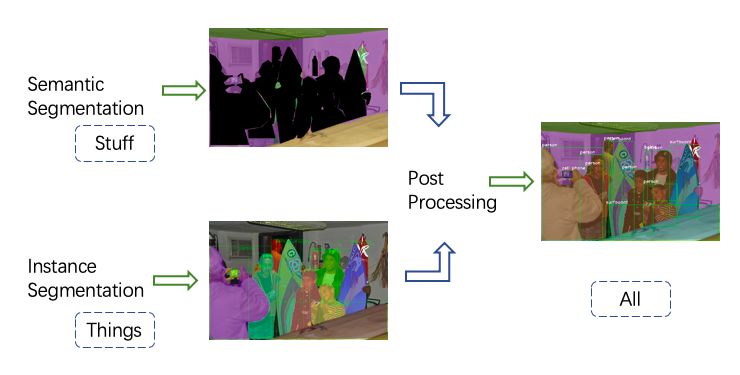
全景分割算法流程圖
在 stuff semantic segmentation 預(yù)測(cè)階段,首先我們對(duì)網(wǎng)絡(luò)結(jié)構(gòu)進(jìn)行了部分調(diào)整以得到更好的分割效果。首先,網(wǎng)絡(luò)最終的下采樣倍數(shù)設(shè)為 8 ,保證輸出結(jié)果的分辨率;然后,由于網(wǎng)絡(luò)的 encoder 不會(huì)擴(kuò)大網(wǎng)絡(luò)的感受野, 因此我們?cè)跇?biāo)準(zhǔn) ResNet 之后使用了若干層 Res-Block。
另外,實(shí)驗(yàn)發(fā)現(xiàn) stuff 類別和 object 類別之間的上下文對(duì)于 stuff 分割較為重要,因此我們?cè)诰W(wǎng)絡(luò)預(yù)測(cè)中融入了上下文信息,并通過(guò)多階段、多種監(jiān)督的方式實(shí)現(xiàn),網(wǎng)絡(luò)結(jié)構(gòu)如下圖所示:
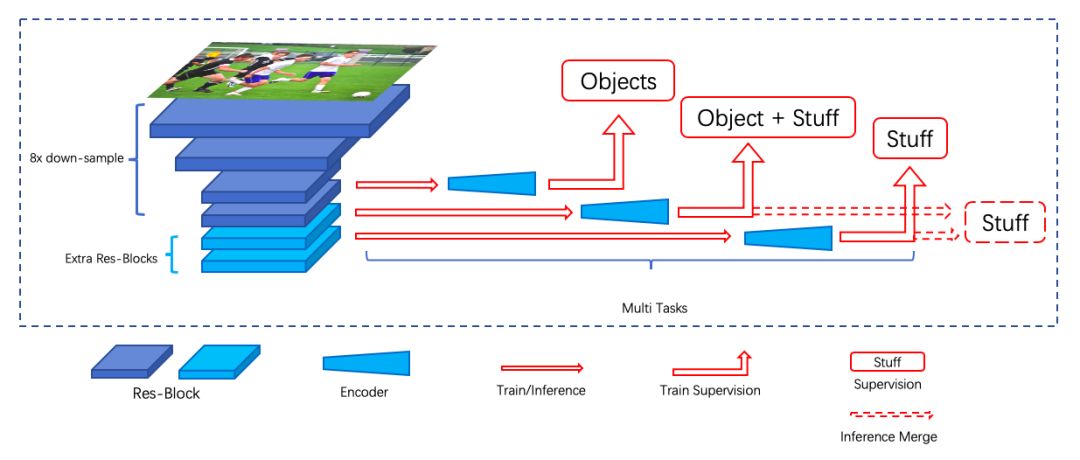
stuff semantic segmentation 結(jié)構(gòu)圖
對(duì)于 object instance segmentation,我們使用了與 Mask RCNN 相同的網(wǎng)絡(luò)結(jié)構(gòu)及訓(xùn)練配置。最后,通過(guò)使用更大的網(wǎng)絡(luò)基礎(chǔ)模型,multi scale + flip 的測(cè)試方法,以及多模型的ensemble操作,我們?nèi)〉昧俗罱K的預(yù)測(cè)結(jié)果,如下圖所示:

Panoptic Results on COCO test-dev Dataset
總結(jié)與分析
從上文的文獻(xiàn)分析來(lái)看,全景分割任務(wù)的不同重要問(wèn)題均得到了廣泛探究,但是全景分割任務(wù)依然是有挑戰(zhàn)性、前沿的場(chǎng)景理解問(wèn)題,目前仍存在一些問(wèn)題需要進(jìn)行探究:
第一,由于全景分割可通過(guò)分別預(yù)測(cè)實(shí)例分割子任務(wù)與不規(guī)則類別分割子任務(wù)、兩個(gè)子任務(wù)預(yù)測(cè)結(jié)果融合得到,整個(gè)算法流程中包含較多的細(xì)節(jié)與后處理操作,包括segments的過(guò)濾、啟發(fā)式融合算法、ignore 像素點(diǎn)的判斷等。這些細(xì)節(jié)對(duì)全景分割指標(biāo)有較大的影響,在一定程度上也阻礙了不同算法的對(duì)比與評(píng)測(cè);
第二,全景分割評(píng)測(cè)指標(biāo)雖然能夠較好地評(píng)測(cè)全景分割中實(shí)例物體檢測(cè)準(zhǔn)確度,以及實(shí)例物體與不規(guī)則類別的分割準(zhǔn)確度,但是該評(píng)測(cè)指標(biāo)更側(cè)重每個(gè)實(shí)例,并沒有關(guān)注每個(gè)實(shí)例之間的區(qū)別。文獻(xiàn) [6] 提出了對(duì)大物體有更好的評(píng)測(cè)指標(biāo)PC (Parsing Covering),使得大物體的分割效果對(duì)最終的評(píng)測(cè)指標(biāo)影響更大,在一些關(guān)注大物體的任務(wù)如肖像分割、自動(dòng)駕駛中更為有效;
第三,全景分割中子任務(wù)的融合問(wèn)題,目前研究依然較多地將全景分割看做是 object instance segmentation 與 stuff segmentation 兩個(gè)子任務(wù)的合集,如何從全局、統(tǒng)一的分割問(wèn)題出發(fā),針對(duì)性設(shè)計(jì)符合全景分割的統(tǒng)一網(wǎng)絡(luò),具有重要的意義。
-
網(wǎng)絡(luò)結(jié)構(gòu)
+關(guān)注
關(guān)注
0文章
48瀏覽量
11325 -
計(jì)算機(jī)視覺
+關(guān)注
關(guān)注
8文章
1703瀏覽量
46249 -
識(shí)別技術(shù)
+關(guān)注
關(guān)注
0文章
206瀏覽量
19822
原文標(biāo)題:漫談全景分割
文章出處:【微信號(hào):megvii,微信公眾號(hào):曠視MEGVII】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
曠視科技face++股東名單_曠視科技face++歷史幾輪融資情況
曠視科技怎么樣?曠視科技最新估值多少
曠視河圖重磅亮相CeMAT ASIA 2019 為智慧供應(yīng)鏈打造生態(tài)底座
曠視斬獲6冠 彰顯深度學(xué)習(xí)算法引擎優(yōu)勢(shì)
曠視科技正在大舉推進(jìn)香港IPO計(jì)劃
IPO申請(qǐng)獲批 AI實(shí)力雄厚的曠視科技未來(lái)可期
曠視深度學(xué)習(xí)框架曠視天元宣布開源
曠視科技開源國(guó)產(chǎn)自主深度學(xué)習(xí)框架激發(fā)AI生產(chǎn)力
曠視科技宣布開源新一代AI生產(chǎn)力平臺(tái)Brain++的核心深度學(xué)習(xí)框架曠視天元
曠視開源深度學(xué)習(xí)框架 覆蓋AI全流程研發(fā)
曠視的重構(gòu)城市物聯(lián)網(wǎng)生態(tài)方案
曠視科技科創(chuàng)板開啟上市輔導(dǎo) 曠視科技股票要來(lái)了
AI算法說(shuō)-圖像分割





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論