 特斯拉車載傳感器配置方案
特斯拉車載傳感器配置方案
下圖是特斯拉官方網站上查到的特斯拉車載傳感器配置,足夠詳細。

1. 攝像頭
特斯拉車輛標配總共有 8 個攝像頭,后面是一個倒車攝像頭,前面是一個三目的總成件。兩側一邊還有兩個。
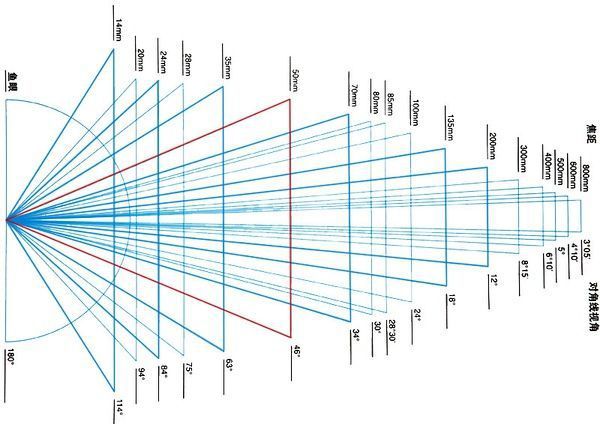
魚眼、正常和長焦
后視
中距攝像頭實景
關于不同的鏡頭是什么關系,引用了知乎上的一張圖,請大神看到后聯系我們。
側視,具體的說是側視安裝的位置,是有特色的。側后視裝在翼子板上,位置靠前;側前視裝在 B 柱,位置在側后視的安裝位置之后 1m。側前視和側后視相互重疊,這樣就保證了無盲區。這 4 個攝像頭就基本保證了 Tesla 的 L3 級別的功能:變道、合流、出高速。從實景照片中可以看出,相鄰左右車道確實是無死角的照顧到了。

側前視
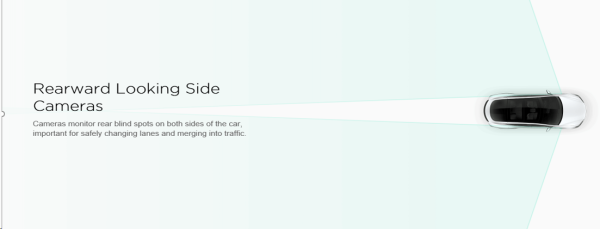
側后視
側后視實景
側前視實景
2. 毫米波雷達
特斯拉的車上,毫米波雷達就裝了 1 個,160 米,按照這個探測距離,該雷達是個 77G 的。
特斯拉之前一直僅僅將毫米波定位為一個輔助的傳感器,結果撞了大卡車。筆者曾經把特斯拉在 LinkedIn 上的人搜了一遍,看看他們是什么背景。結果,一大票人都是常青藤做視覺的 MS 或者 PHD,所以別怪人家把視覺玩的這么溜。

但是,但是,視覺總歸是二維的,八個攝像頭,同時處理的話,消耗的 GPU 資源不少。結果出事了。還出了不少事。下圖這個筆者認為比較經典:
武漢特斯拉自動駕駛撞翻一片護欄
人類都有可能被視覺欺騙,別說機器了。所以攝像頭這種通過計算來感知的手段要有,通過直接測量的手段來感知更是必不可少。毫米波雷達和激光雷達,個人認為儀器的成分更多一點,是一個可靠的自動駕駛系統必不可少的。
3. 超聲波
對于特斯拉來說,在其他地方不起眼的超聲波,俺們也要好好用,畢竟測量型傳感器除了一個毫米波,就是這 12 個超聲波了。筆者曾經和某大佬聊過自動駕駛使用超聲波的問題,他覺得超聲波精度不行,距離不行,無法用。恩,那能把超聲波用在自動駕駛上面的,確實是天才。筆者其實也蠻佩服。轉一個知乎上的科普貼:
陳光:無人駕駛技術入門(八)| 被嚴重低估的傳感器超聲波雷達
https://zhuanlan.zhihu.com/p/35177313
探測范圍 8 米的超聲波,找的到嗎?獻上鏈接,不敢保證 Tesla 用的就是這家的,但是肯定類似。筆者的朋友當年把這個玩意用在無人機上做壁障,還蠻好用的。那個朋友也是個天才,希望他能在續集里上鏡,哈哈。
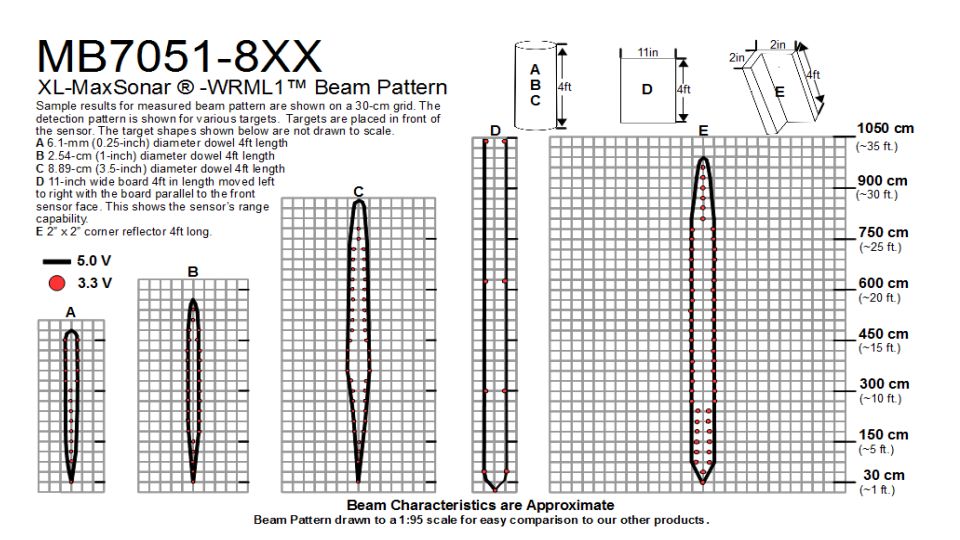
Ultrasonic Sensors and High Performance Proximity Sensors | MaxBotix
www.maxbotix.com
超聲波傳感器最大的問題是什么?學過通信的人應該知道復用這個詞。所有超聲波探頭都工作在一個頻段,相互之間回波還有干擾,只能時分復用。時分復用啊,老大們,12 個探頭輪一圈,啥概念?幾秒過去了。計算 4 個 4 個一組,也很慢。慢,就是超聲波最大的問題。
第二個問題,就是長。一串超聲波,就像一串蘿卜。串在一根繩上。這根繩,連起來十幾米長。長有什么不好,嘿嘿,筆者當年可是吃了大虧。肇慶某公司上海分舵一位大牛面試過筆者,說了句搞硬件就是提個指標的嘛。哎,沒上車沒吃過虧啊。
第三個問題,溫濕度。超聲波對溫濕度極其敏感,要做一個詳細的標定表,要不這個超聲波就不靈了。
還有一個,就是誤報問題,不想展開了。筆者只能說,簡簡單單一個超聲波,就可以折騰你個一兩年。所以,自動駕駛工程化是一條漫漫長路。等 ABCD,那可以洗洗睡了。
4. 視覺與毫米波的融合
特斯拉反應很快,立馬就把毫米波用的妥妥的。知乎上有文章介紹關于激光雷達點云如何與圖像如何融合以及聯合標定。各大創業公司也樂于 Show 點云和圖像的融合結果。
Coulson:視覺激光雷達信息融合與聯合標定:
https://zhuanlan.zhihu.com/p/55825255
但是,能把毫米波和圖像結合起來,足可以見特斯拉的算法能力之強。要用好毫米波,首先要拿到原始數據。
毫米波的原始數據是一條曲線,橫軸是與天線陣面法向的夾角,縱軸是回波信號強度。有興趣的朋友可以找一套 TI 的開發套件來看看。這個波形,人是看不懂的,所以就有了一大票人專門依據這個毫米波波形做信號處理,來提取目標,跟蹤目標。
筆者看了特斯拉 Autopilot 的試駕視頻,可以說,特斯拉的毫米波雷達和視覺的融合是穩定和到位的。
5. 定位
特斯拉用的定位模塊很簡單,UBLOX-M8L,都沒有上 M8P。筆者在這里再一次膜拜特斯拉。可是,特斯拉的定位真的很牛啊。下面這個視頻,主路在前方分成了主路和輔路,還都是高速。MODEL3 妥妥的提前切換到輔路上(6 分 10 秒開始),車主 High 翻了。這就是說,特斯拉妥妥的車道級定位。
Tesla Model 3 Autopilot on Navigation
這個定位是怎么實現的?筆者認為有兩點:
車速較高,白天、環境開闊,M8L 的定位精度 CEP 在 1m 內。筆者寫了個程序,邊開車記錄自己的堅果手機的定位軌跡,定位精度不差。
特斯拉用毫米波做了定位。馬路兩邊的金屬欄桿和路燈是比較好的特征,可以做出類似激光雷達的匹配定位,但精度會差。
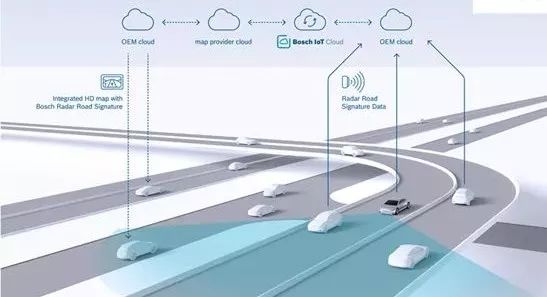
https://techcrunch.com/2017/06/07/bosch-to-create-radar-road-signature-maps-for-high-accuracy-self-driving/
6. Tesla方案存在的問題
特斯拉的方案主要依靠視覺,所以 Tesla 的環境感知三維重建是基于二維的。二維轉換為三維,必然有信息丟失。筆者通過看視頻,發現 Tesla 對遠處的物體有誤識別的情況。特別是這種情況:一個行人,在晚上,穿著黑衣服,突然從路邊竄出來。毫米波看人本來就不行,超聲波又太近,視覺是兩眼一抹黑。別說各種視覺欺騙了。
橫向運動的兩個車,定位的不好
09:02 這兩個黃框不是人,誤識別了用
用Tesla Autopilot的眼睛游覽巴黎(高速篇):
https://v.qq.com/x/page/l07925gsykb.html
基于視覺的方案,主要問題有:
不省時間。我在LinkedIn上搜到了 1000 個做 TESLA、Vision 相關的工程師,不全部都是現員工。不過也可以看出人手不少,開工資得多少錢啊。說明這個視覺的路線,一點都不好做。其他車廠要照著這個路子從 0 做,恩,準備 2030 年量產吧。
不省錢。人力成本是一塊。硬件成本也不便宜,這么多攝像頭,需要GPU的算力支持。筆者剛買了塊 GTX1060,1700 RMB,這還只是消費級產品,市場的量也不小。如果是車規的 ECU,還要達到 ASIL-D,一點都不便宜。不過在激光雷達和 ECU 中間,我寧肯選 ECU,CMOS 工藝啊!激光雷達的核心器件是 III-V 族工藝。
綜合上述兩點,Tesla 適合交通參與者較單一、路面情況較簡單的結構化道路。也就是高速和人車分流的園區。但是,量產車能在高速上實現自動駕駛(L2 級別),確實很贊!此外,特斯拉的最大優勢在于量產的50萬輛AP車在路上跑,為其積累競爭對手無法獲得的海量實際運行數據。
-
特斯拉
+關注
關注
66文章
6318瀏覽量
126646 -
車載傳感器
+關注
關注
0文章
44瀏覽量
4367
原文標題:特斯拉的整車傳感器配置方案
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
TOSUN 車載以太網仿真測試解決方案

車載溫濕度傳感器有什么功能
車載傳感器網絡是什么意思啊
車載傳感器主要有哪些傳感器
XV4001系列陀螺儀傳感器廣泛用于車載導航系統

氧傳感器的工作原理是什么?氧傳感器的作用有哪些?
未來已來,多傳感器融合感知是自動駕駛破局的關鍵

車用傳感器頻繁損壞的原因及解決方案





 工商網監
工商網監
評論