 “突破性能和功耗極限--新一代自動駕駛處理器助力自動駕駛產業化”的演講
“突破性能和功耗極限--新一代自動駕駛處理器助力自動駕駛產業化”的演講
地平線在年初喜獲6億美元融資,更讓人矚目的是,2018年地平線產品開始落地,AI芯片產品的出貨達到數十萬,2018營收達數億元。2019年預計芯片整體出貨可達百萬量級,整體營收會有數倍增長。
2019第四屆ADAS與自動駕駛論壇于3月21-22日在上海召開,論壇由CCIA智能網聯專委會與佐思產研主辦,地平線、縱目科技、中科慧眼、中電昆辰、富蘭光學、創景科技等單位支持。
地平線市場拓展與戰略規劃副總裁李星宇在論壇上發表了題為“突破性能和功耗極限--新一代自動駕駛處理器助力自動駕駛產業化”的演講。以下是演講全文。
目前, 業界的量產車型還在L2級別的ADAS階段,但是主機廠已經在全力以赴推進L3、L4的開發。在開發過程中,主機廠在計算方面面臨非常大的難題,就是算力不夠。我們來看現在主流的需求,自動駕駛等級每升一級,就需要約13倍的算力提升。
算力的饑渴來自哪里?現在大部分算力用在感知,但是感知只是第一步,而且是算力要求最低的一步。往更高級別走需要融合,融合就需要建模,同時還要做預測,再往后需要基于人工智能和規則的混合決策,這些都需要更高的算力。
很多人在談到自動駕駛芯片的時候,會問你們家芯片算力到底是多少?如果我們停留在討論多少T的算力,是不是能代表實際功效呢?事實上,我們要考慮算力有效性是怎樣的,這里的有效性指從經濟和性能角度衡量AI計算。首先算力利用率如何?接下來要考量功耗如何?計算成本如何?最后也是最重要的,就是把AI的算力轉化為AI輸出的效率,這是多維的目標輸出,包含目標數量、準確性等。我們要更加全面的衡量實際效能,才能夠真正評判一個自動駕駛處理器的有效性如何。

大家知道卷積神經網絡有大量中間數據產生,這里的關鍵是如何合理調配內存、外存的網絡和計算單元之間的通路,如果不能得到充分的調配,那計算單元的效力也發揮不出來。為了解決這樣的瓶頸,地平線巧妙設計了計算構架與存儲器訪問控制器,使它做到精確的匹配,通過這樣一種協同的設計,就可以達到極高的利用率,并且能夠將功耗控制在有效的足夠低的范圍內。

地平線通過把算法、計算構架以及工具鏈的協同,讓BPU能夠提供比GPU高30倍的性能。我們2017年年底發布了第一代BPU芯片,2019年會推出第二代芯片,有十倍性能的提升,車規級的設計。
我們還提供配套的開發平臺Matrix,在今年CES 上Matrix獲得了創新大獎,Matrix現在版本還是FPGA來構建,之后會替換成第二代的處理器,主要能力體現在視覺感知方面,通過BPU進行算法加速,支持多目標識別以及全景語義分割。

在語義分割里面,把斑馬線、紅綠燈、行駛區域全部通過偽彩表現出來(視頻播放)。通過不同組合,可以做到很好的360度短距和長距的全覆蓋。很多人會說,這個芯片只適合做視覺處理,其實不是,同樣適合做激光點云的目標識別。這樣使得我們未來很容易做到激光和視覺的融合識別,同時它有很高的可靠性,且有更好的吻合度,因為激光雷達有深度距離上的精準測量,加上視覺的顏色信息,可以構成非常精準全面的信息輸入。
剛剛提到算法和架構的協同設計。這里有一個基于地平線第二代BPU架構和某主流芯片的效能算法對比。我們跑了老的算法比如Resnet,地平線BPU2.0有它的優勢,但是不明顯,當逐漸過渡到最新的算法,比如MobileNet-V2的時候,我們發現效能劇增。實際上這種Depth-wise的算法要求計算構架同步進行更新,如果還是原來的大規模并行計算構架,就不能很好發揮計算單元的效果,使得算力明顯下降。這是很有說服力的結果,如果不能把計算構架和算法結合的話,很難發揮好的效果。
地平線提供深度學習的算法和處理器,同時我們保持足夠的開放度,提供開放的工具鏈,去支持客戶已有的算法。因為我們面對的駕駛環境足夠多,地平線的算法模型不可能在每個維度上都可以覆蓋到,尤其是面向不同場景的模型。所以我們提供了工具鏈,能夠使客戶在標準算法框架下,通過我們的模型轉化工具,將客戶的模型適配到我們自己的算法,轉化成我們的芯片可以執行的非常高效的runtime。

地平線提供全棧感知軟件和全棧工具鏈。現在作為一家芯片公司,要做的不僅僅是AI芯片的開發,更大的工作量是構建全棧的工具鏈以及底層軟件。現在全球有超過70家初創公司做AI芯片,但是真正具備強大工具鏈開發能力的公司并不多。另外,我們還需要考慮在全棧軟件開發上,都需要符合主動安全標準,這是更大的挑戰。
在過去幾十年PC發展史里面,雖然沒有深度學習,但從本質上講,都是在提高性能、降低功耗。傳統的計算構架的積累,經典的方法論已經非常成熟了,地平線通過把經典理論和深度學習算法結合,最終也能達到非常好的效果。比如我們通過指令和數據存儲的巧妙組合,使得數據存取/指令執行可以并行進行,進一步提升整個系統的執行效果。
接下來再看另外一個創新成果Navnet,這是業界第一次基于視覺的實時3D定位和語義地圖構建Solution。我們基于單目的前攝像頭,可以進行視覺點云的重建。過去如果進行點云重建都是用激光雷達,非常昂貴,Navnet提供了非常低成本的解決方案。點云定位的優勢在那里?非常穩定。另外還可以基于點云提取語義,很好把點云進行參數化,提取必需的地圖元素。
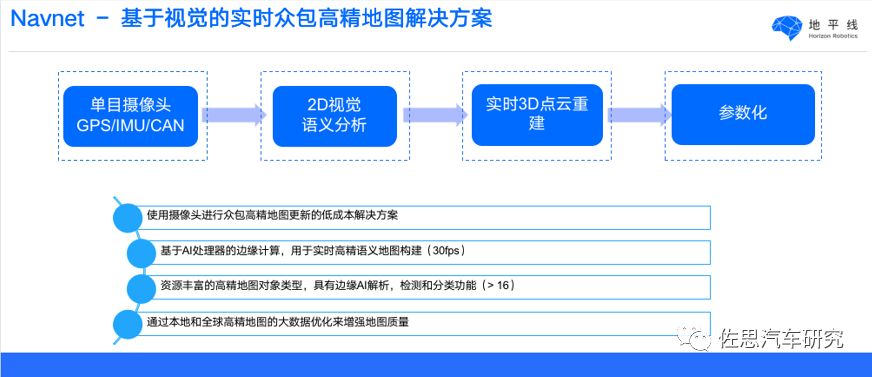
這樣的低成本的解決方案,意味著可以做大規模的眾包建圖方案實施。我們第一次把這樣的方案放在廉價的邊緣計算設備上進行,使得我們對地圖元素的采集非常方便,包括標識牌、人行橫道、車道線、紅綠燈、路燈等構成一個高可靠性的,3D實時語義地圖,使地圖有實時更新的能力。
我們可以提供后裝的解決方案,未來結合ADAS,可以變成前裝解決方案,大規模地采集數據,能夠在云上進行實時的監控,并且把數據傳回到云端,如果車輛覆蓋密度足夠高的話,我們可以大大優化地圖的精度,再推送到車輛,形成一套完整的閉環解決方案。
Navnet的輸出可以分為多層,可以直接輸出點云,也可以輸出結構化的語義信息,而語義地圖的輸出吞吐量是很小的,不到100K。
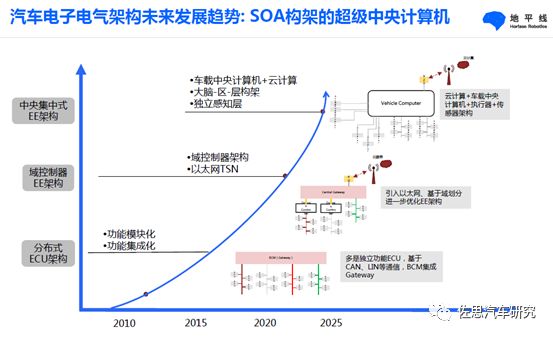
最后分享一點對于業界最新趨勢的觀察,我們看到過去傳統的分布式ECU構架逐漸集中化了,這樣過程中會有過度階段,比如說多域控制器,還有域控制器之間的融合,逐漸演進。
過去的分布式的EE架構,使得軟件開發更新特別麻煩。同時,如果今后還是分布式架構,為了達到功能安全的要求,所有的傳感器都要兩套,成本太高了。通過這種高度融合的方式,形成單一的中央計算機,加上感知層、執行區這樣的概念,可以充分的利用已有的技術,在上層增加非常多的安全路由,可以動態調配集成資源,每個集成資源都可以共享多個資源和機組,這很像人體的架構。
在未來還會和云端結合,形成一種端云結合的協同式決策感知解決方案。這樣一種新的體系構架,事實上對感知能力提出了更高要求。
如果我們只是做L2級別ADAS的話,可能只需要關注目標識別就夠了,不需要那么強的感知能力。如果我們放到新的構架下,它對感知能力需求就會變得非常高,而且要求感知能力要持續提升,所以未來,當我們部署一套硬件設備以后,它的能力需要持續的進化,我們需要持續不斷迭代它的軟件,進而為未來的各種各樣應用開發提供非常好的基礎層。
這樣的構架下,事實上對智能駕駛的芯片整體能力又提出了新要求,比原來面向單一功能要求高得多。所以這也是為什么地平線持續提升感知維度的根源所在。
自動駕駛如果真正要落地,面臨無數的問題,我們希望和在座的朋友一起,攜手并進,把這件事情落到實處,謝謝各位!
-
芯片
+關注
關注
456文章
50892瀏覽量
424325 -
人工智能
+關注
關注
1792文章
47354瀏覽量
238811 -
自動駕駛
+關注
關注
784文章
13839瀏覽量
166552
原文標題:2018地平線芯片出貨已達數十萬,新一代處理器助力自動駕駛產業化
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文聊聊自動駕駛測試技術的挑戰與創新

Apollo自動駕駛開放平臺10.0版即將全球發布
自動駕駛汽車安全嗎?



FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
自動駕駛汽車傳感器有哪些
Nullmax正式推出新一代自動駕駛技術Nullmax Intelligence

未來已來,多傳感器融合感知是自動駕駛破局的關鍵
自動駕駛已成現實?賽思時間同步服務器賦能北京市高級別自動駕駛示范區,為自動駕駛提供中國方案






 工商網監
工商網監
評論