 MIT 研發自學習機器人系統,可以拾取以前從未見過的東西
MIT 研發自學習機器人系統,可以拾取以前從未見過的東西
機器人擅長做的一件事就是一遍又一遍地重復,而面對不同形狀和大小的物體并采取不同的行動,這顯然屬于更高級別的技術。麻省理工學院計算機科學與人工智能實驗室(CSAIL)的科學家開發出了一種多功能的新型機器人,他們可以學習拾取和放下各種各樣的東西,甚至是以前從未見過的東西。
“研究智能機器人最重要的是要仔細觀察機器人沒有做什么,或者不能做什么。”MIT教授Russ Tedrake在一篇關于該項目的新論文中說道, “機器人在重復運動時似乎非常在行,但如果它是他們以前從未見過的物體,實際上就無法以任何有意義的方式來完成。”
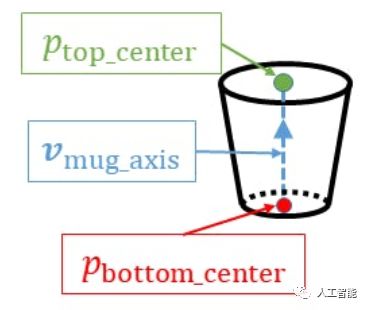
這項工作旨在建造能夠精確處理各種物體的機器人,其中包括傳統形狀的軟機器人夾子以及更加非常規的設計。這種機器人抓手主要依靠估計物體的位置和方向,使用基于幾何學的算法來抓住它們。新方法依賴于對象上的一組關鍵點,它將其解釋為坐標。他們提供一個杯子作為一個例子,系統只需要三個坐標來抓住,包括杯子中心的一個關鍵點,再加上底部和手柄足以完成工作。
這款名為Keypoint Affordance Manipulation(KPAM)的智能控制軟件旨在為機器人提供更大的靈活性。通過為系統提供六個關鍵點,科學家們已經擁有一個運行KPAM的機器人手臂,可以拾取20多種不同的鞋子,包括從拖鞋到靴子等等的各種鞋子 - 盡管在嘗試拿起一雙高跟鞋時遇到了一些麻煩,但在神經網絡訓練數據中添加幾對數據就很快就完成了任務。
“只需了解一下這個對象 - 一些關鍵點的位置 - 足以實現各種有用的操作任務,”Tedrake說。 “這種特殊的表現形式與當今最先進的機器學習感知和規劃算法完美結合。”
該團隊希望繼續改進KPAM技術,以便它可以執行更廣泛的任務,例如拆除洗碗機或清潔廚房柜臺。更重要的是,包含學習能力機器人可以很容易地成為工廠等大型操縱系統的一部分。
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
MIT
+關注
關注
3文章
253瀏覽量
23389
原文標題:麻省理工學院的自學習機器人系統可以拾取以前從未遇到過的物品
文章出處:【微信號:machine_vision_1,微信公眾號:機器視覺智能檢測】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
你從未見過的全新SiC失效定位方案

《DNK210使用指南 -CanMV版 V1.0》第四十八章 自學習分類實驗
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
使用機器學習和NVIDIA Jetson邊緣AI和機器人平臺打造機器人導盲犬
物聯網系統中聲音拾取音頻方案_咪頭
商湯科技元蘿卜國際象棋機器人9月上市
海康機器人推出全新一代潛伏叉取式機器人
Al大模型機器人
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
新品 | Bumblebee X系列用于高精度機器人應用的新型立體視覺產品






 工商網監
工商網監
評論