") 自主式機(jī)器迎來新機(jī)遇:高性能慣性檢測解決方案助力
自主式機(jī)器迎來新機(jī)遇:高性能慣性檢測解決方案助力
無論是在制造業(yè)、農(nóng)業(yè)、物流業(yè)、能源業(yè)、汽車業(yè)還是無人機(jī)行業(yè),機(jī)械自動化都有望顯著提高資源效率、設(shè)備精度和安全性。為實(shí)現(xiàn)這些效益,關(guān)鍵是找出合適的檢測技術(shù)以增強(qiáng)對設(shè)備狀況相關(guān)情境的了解,使得設(shè)備的地點(diǎn)或位置成為有價值的輸入。對此,通過指出精確地點(diǎn)或維持精準(zhǔn)定位,精密慣性傳感器有望發(fā)揮巨大作用。在某些應(yīng)用中,運(yùn)動是一個重要因素,若將其位置信息和傳感器情境信息相關(guān)聯(lián),將產(chǎn)生意義重大的價值。很多情況下,尤其是在復(fù)雜或惡劣環(huán)境下工作時,確定位置有著關(guān)鍵性作用。運(yùn)動物聯(lián)網(wǎng)(IoMT)在實(shí)現(xiàn)效率大幅提升的道路上還面臨著許多挑戰(zhàn),高性能慣性傳感器將對其發(fā)展起到重要的推動作用。
傳感器推動機(jī)器自動化
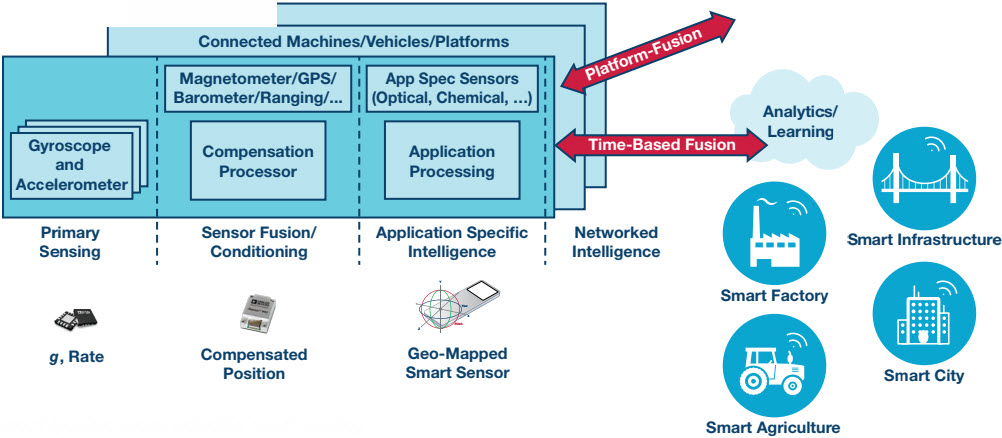
機(jī)械設(shè)備已從執(zhí)行簡單的被動測量發(fā)展到包含嵌入式控制功能,現(xiàn)在正進(jìn)軍完全自主式運(yùn)作,這其中傳感器發(fā)揮著重要的推動作用。無論是支持離線分析的簡單測量,還是過程控制,很多此類傳感器在孤立環(huán)境下都能充分有效地工作。獲取實(shí)時信息的需求,加上日益豐富的檢測類型和高效處理,使傳感器融合——通過它能夠最有效地確定與多種應(yīng)用和環(huán)境狀態(tài)相關(guān)的情境——取得重要進(jìn)步。此外,在涉及多平臺交互和需要獲取歷史系統(tǒng)狀態(tài)的復(fù)雜系統(tǒng)中,連接技術(shù)的進(jìn)步為智能程度日益提高的傳感器系統(tǒng)提供支持,如表1所示。
表1. 傳感器集成和連接水平
| 傳感器 | 單個基本檢測元件 |
| 多傳感器 | 識別多種檢測類型以滿足應(yīng)用需求 |
| 融合傳感器 | 利用一個傳感器校正另一個傳感器,或在傳感器之間進(jìn)行狀態(tài)驅(qū)動的切換 |
| 智能傳感器 | 本地化、嵌入式處理,支持實(shí)時分析和決策 |
| 互連傳感器 | 通信鏈路支持跨平臺信息共享 |
| 智慧傳感器 | 利用跨時間信息(例如云和數(shù)據(jù)庫)適應(yīng)并學(xué)習(xí)變化 |
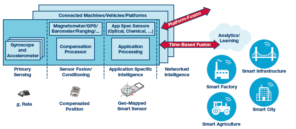
這些已面世的智能型傳感器系統(tǒng)正在一些所謂的成熟行業(yè)掀起革命,把農(nóng)業(yè)變成智能農(nóng)業(yè),把基礎(chǔ)設(shè)施變成智能基礎(chǔ)設(shè)施,把城市變成智能城市。由于傳感器被部署在這些環(huán)境中以收集相關(guān)的情境信息,數(shù)據(jù)庫管理和通信方面出現(xiàn)了新的挑戰(zhàn),不僅要求傳感器之間的融合,而且要求實(shí)現(xiàn)跨平臺、跨時間的復(fù)雜融合(例如:對跨時間的基礎(chǔ)設(shè)施狀況、前一年的農(nóng)作物產(chǎn)量、交通狀況及模式進(jìn)行基于云計(jì)算的分析),如圖1所示。
在機(jī)動性很重要的情況下,需要確定情境傳感器數(shù)據(jù)的地理位置。事實(shí)上,物聯(lián)網(wǎng)很少被視為靜態(tài)。工廠、田野和醫(yī)院中的可移動設(shè)備能發(fā)揮更大的用處,而地理位置不動的設(shè)備的光學(xué)傳感器也可能需要局部移動,比如轉(zhuǎn)向和對位。運(yùn)動物聯(lián)網(wǎng)(表2)能融合情境數(shù)據(jù)和位置數(shù)據(jù),極大地提高數(shù)據(jù)分析的價值和效益。舉個例子,當(dāng)分析農(nóng)作物增產(chǎn)的機(jī)會時,試著想象比較以下兩種情形:一是對每顆所種種子的溫度、濕度、精確位置都了如指掌,二是僅知道種子隨機(jī)播撒的農(nóng)地的溫度和土壤條件;顯然第一種情形更有利于做出準(zhǔn)確分析。
表2. 精確定位與情境交融,實(shí)現(xiàn)運(yùn)動物聯(lián)網(wǎng)
| 互聯(lián)網(wǎng)情境傳感器 | 位置傳感器 | |||
| 溫度 | + | 慣性 | = | 運(yùn)動互聯(lián)網(wǎng) |
| 光學(xué) | GPS | |||
| 化學(xué) | 磁力計(jì) | |||
| 氣體 | 氣壓計(jì) | |||
| 振動 | 分布區(qū)域 |
智能機(jī)器中的慣性傳感器
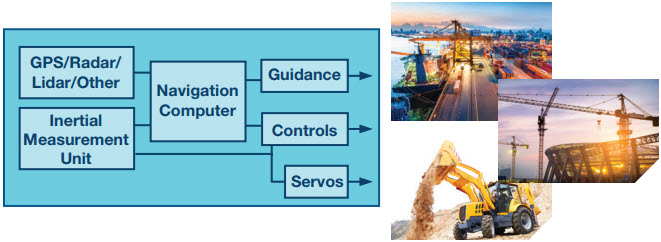
在大多數(shù)智能機(jī)器中,慣性傳感器主要起到兩個作用:一是設(shè)備穩(wěn)定和瞄準(zhǔn),二是導(dǎo)航和制導(dǎo),如圖2所示(另一個重要作用是振動分析和條件監(jiān)控,對此將單獨(dú)說明)。GPS由于無處不在,可能被視為大多數(shù)系統(tǒng)的首選導(dǎo)航輔助手段,但在某些情況下,依賴GPS會帶來一些嚴(yán)重問題,因?yàn)樗赡軙蛔钃酢T贕PS被阻擋期間切換到慣性檢測是可行的,但要求慣性傳感器質(zhì)量足夠好,并能在此期間提供足夠高的精度。對于穩(wěn)定或伺服環(huán)路,反饋機(jī)制可能要依賴慣性傳感器,以使天線、吊車平臺、施工刀片、農(nóng)具或無人飛行器上的相機(jī)維持一個可靠的指向角。在所有這些例子中,慣性傳感器的作用已不僅僅是提供有用的功能(如手機(jī)中的手勢控制等),而是發(fā)展到要在異乎尋常的困難環(huán)境中提供關(guān)鍵精度或安全機(jī)制(參見表3)。
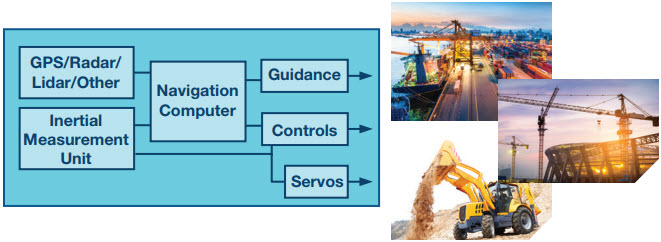
表3. 困難環(huán)境下的工業(yè)應(yīng)用對慣性傳感器提出極具挑戰(zhàn)性的要求
| 主要挑戰(zhàn) |
| 在GPS被阻擋時提供分米級精度 |
| 即便在振動、極端溫度、有風(fēng)等狀況下也能維持高精度 |
| 在所有條件下可靠安全地運(yùn)作 |
傳感器的質(zhì)量非常重要
有一種不切實(shí)際的說法是,可以利用傳感器融合算法,通過編程使技術(shù)水平很差的傳感器獲得良好的性能。傳感器融合的確可用于某些校正,例如:利用溫度傳感器校正其他傳感器的溫漂,或利用加速度計(jì)(g)傳感器校正陀螺儀的重力效應(yīng)。但即使是在這些情況下,也只能依據(jù)環(huán)境來校準(zhǔn)給定傳感器,而無法提高它在校準(zhǔn)點(diǎn)之間維持性能的固有能力;也就是說,只能插值而無法維持校準(zhǔn)精度。質(zhì)量較差的傳感器通常會迅速漂移,如果不進(jìn)行廣泛和成本高昂的校準(zhǔn),精度會立即下降。
盡管如此,為使器件發(fā)揮最高性能,即使高質(zhì)量傳感器通常也需要進(jìn)行一定的校準(zhǔn)。為了以最具性價比的方式進(jìn)行校準(zhǔn),必須了解傳感器的復(fù)雜細(xì)節(jié)和運(yùn)動力學(xué)的深厚知識(參見圖3),更不用說需要比較獨(dú)特的測試設(shè)備。因此,校準(zhǔn)和補(bǔ)償步驟越來越多地被看成是傳感器制造商必須提供的嵌入式功能。
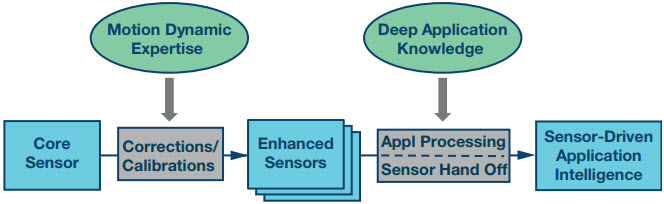
將基本檢測輸出轉(zhuǎn)換為有用的應(yīng)用級智能的第二個重要步驟是狀態(tài)驅(qū)動的傳感器切換。這就意味著要對應(yīng)用動力學(xué)以及傳感器性能有廣泛深入的了解,從而最有效地在任一給定時間點(diǎn)確定可以利用和依賴的傳感器。
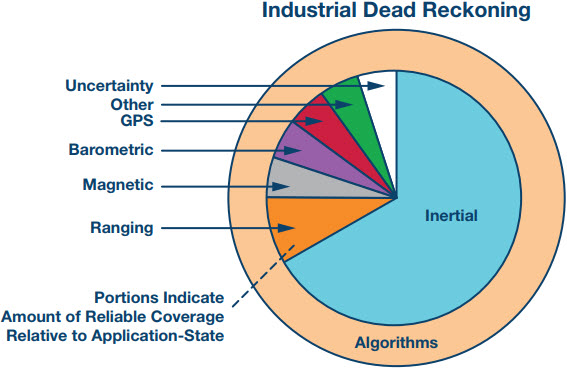
圖4中的概念示例說明了傳感器融合在工業(yè)應(yīng)用中的作用。這是一種精密從動工業(yè)應(yīng)用,通過精心選擇傳感器來滿足預(yù)期需求,在GPS有很大可能被阻擋,或在有復(fù)雜磁場和其他環(huán)境干擾的情況下保持運(yùn)作。為此必須高度依賴無基礎(chǔ)設(shè)施的慣性傳感器,并選擇其他傳感輔助手段來應(yīng)對特定環(huán)境挑戰(zhàn),幫助校正長期慣性漂移。雖然較好的做法是對傳感器選擇進(jìn)行規(guī)劃以實(shí)現(xiàn)所有條件下的精確跟蹤,但這種做法在實(shí)際上是不可行的。因此,場景規(guī)劃中仍存在一定的不確定性。已有算法來執(zhí)行重要的傳感器校準(zhǔn),以及管理應(yīng)用狀態(tài)驅(qū)動的復(fù)雜傳感器切換。
歸根結(jié)底,最終應(yīng)用將決定所需的精度水平,而所選的傳感器質(zhì)量將決定其能否實(shí)現(xiàn)。
表4比較了兩種場景,說明了傳感器選擇對設(shè)計(jì)過程和設(shè)備精度均很重要。如果只在很有限的情況下依賴傳感器,并且應(yīng)用有較高的容錯性,那么可以使用低精度傳感器。換言之,如果不是安全或生命攸關(guān)的應(yīng)用,相對較低的精度便足夠了。雖然多數(shù)消費(fèi)級傳感器在有利條件下噪聲很低且性能良好,但它們不適合用于動態(tài)運(yùn)動(包括振動)下的機(jī)器,因?yàn)樾阅茌^低的慣性測量單元無法將動態(tài)運(yùn)動與簡單的線性加速度或所需的傾斜測量區(qū)分開來。在工業(yè)環(huán)境中工作時,為實(shí)現(xiàn)優(yōu)于1度的精度,應(yīng)當(dāng)選擇專門設(shè)計(jì)的傳感器,以便抑制振動或溫度影響導(dǎo)致的誤差漂移。這種高精度傳感器能夠支持更大范圍的預(yù)期應(yīng)用狀態(tài),工作時間也更長。
表4. 具有復(fù)雜、關(guān)鍵任務(wù)要求的工業(yè)應(yīng)用依賴高精度傳感器
| 慣性傳感器質(zhì)量 | 特性 | 在傳感器融合中的作用 | 傳感器融合之后的精度 | 適合于: |
| 高精度 | 超低噪聲,在所有條件下穩(wěn)定工作 | 主傳感器,受到高度依賴,支持惡劣/無法預(yù)測的條件 | ~0.1° | 復(fù)雜運(yùn)動、長壽命、任務(wù)關(guān)鍵型的使用場景 |
| 低精度 | 低到中等噪聲,穩(wěn)定性差,在振動和臨時沖擊下的漂移不確定 | 權(quán)重較低的備用傳感器,可靠性有限或依賴于特定條件 | 3° 至 5° | 簡單運(yùn)動、短壽命、高容錯性的使用場景 |
高性能慣性傳感器
針對性能的設(shè)計(jì)與針對成本、尺寸、功耗效率的設(shè)計(jì)并不是互相排斥的。然而,以降低成本為主要目標(biāo)的MEMS結(jié)構(gòu)設(shè)計(jì)通常會犧牲性能,有時甚至?xí)?yán)重削弱性能。為降低成本而做出的一些簡單選擇,例如縮小硅片質(zhì)量和用塑料封裝消費(fèi)級產(chǎn)品等,對MEMS性能有很大的不利影響。為了從微機(jī)電器件(例如圖5所示)提取精確穩(wěn)定的信息,必須有很高的信噪比,而信噪比是由硅片面積和厚度決定的,另外還要選擇適當(dāng)?shù)钠骷庋b和系統(tǒng)外殼,使硅片受到的應(yīng)力最小。在一開始定義傳感器時便牢記最終應(yīng)用的性能要求,據(jù)此優(yōu)化硅片、集成、封裝、測試和校準(zhǔn)方法,使得在復(fù)雜環(huán)境下也能維持原有性能,并且使成本最低。
表5顯示了一款中檔工業(yè)器件的性能,并將其與手機(jī)等設(shè)備使用的典型消費(fèi)級傳感器進(jìn)行比較(注意還有更高端的工業(yè)器件,其性能比表中所示高出一個數(shù)量級)。多數(shù)低端消費(fèi)級器件未提供諸如線性加速度效應(yīng)、振動校正、角度隨機(jī)游走之類的參數(shù)規(guī)格,而這些規(guī)格在工業(yè)應(yīng)用中恰恰可能是最大的誤差源。
表5. 工業(yè)MEMS器件對所有已知潛在誤差源進(jìn)行全面測定,通常能實(shí)現(xiàn)高出一個數(shù)量級或更高的精度水平
| 參數(shù) | 典型工業(yè)規(guī)格 | 單位 | 相對于典型消費(fèi)級器件的改善 |
| 陀螺儀 | |||
| 動態(tài)范圍 | 最高 2000 | °/sec | ~ |
| 噪聲密度 | 0.004 | °/sec/√Hz rms | 2× |
| 角度隨機(jī)游動 | 0.2 | °/√Hr | 2× |
| 運(yùn)動中穩(wěn)定度 | 5 | °/hr | 3× |
| 偏置重復(fù)性 | 0.2 | °/sec | 100× |
| ?3 dB 帶寬 | 465 | Hz | 2× |
| 加速度計(jì) | |||
| 動態(tài)范圍 | 最高 40 | g | 3× |
| 噪聲密度 | 25 | micro-g/√Hz rms | 10× |
| 速度隨機(jī)游動 | 0.03 | m/s/√Hr | 10× |
| 運(yùn)動中穩(wěn)定度 | 10 | micro-g | 10× |
| 偏置重復(fù)性 | 25 | mg | 100× |
| ?3 dB 帶寬 | 500 | Hz | 2× |
| 軸對齊 | 0.05 | 度 | 20× |
| 線性加速度效應(yīng) | 0.01 | °/sec/g | 10× |
| 振動校正 | 0.004 | °/sec/g2 | 10× |
| 靈敏度溫度系數(shù) | 25 | ppm/°C | 10× |
| 偏置溫度系數(shù) | 0.007 | °/s/°C | 10× |
這款工業(yè)傳感器設(shè)計(jì)用于預(yù)期會有相對迅速或極端運(yùn)動(2000 °/s、40 g)的場景,寬帶寬傳感器輸出對最佳地辨別信號也很關(guān)鍵。工作期間的失調(diào)漂移(運(yùn)動中穩(wěn)定度)應(yīng)最小,以降低對一大套補(bǔ)充傳感器(用來校正性能)的依賴。在某些情況下,應(yīng)用無法為后端系統(tǒng)濾波校正提供所需的時間,此時必須使開機(jī)漂移(可重復(fù)性)最小化。低噪聲加速度計(jì)同陀螺儀一起使用,以幫助區(qū)別并校正任何g相關(guān)漂移。
陀螺儀傳感器設(shè)計(jì)用來直接消除任何g事件(振動、沖擊、加速度、重力)對器件失調(diào)的影響,可大幅改善線性g。通過校準(zhǔn),溫漂和對準(zhǔn)均得以校正。若不進(jìn)行對準(zhǔn)校正,典型多軸MEMS器件即使集成到單片結(jié)構(gòu)中,也可能有較大對準(zhǔn)誤差,使其成為誤差預(yù)算的主要貢獻(xiàn)因素。
近年來,噪聲在區(qū)分傳感器級別上所起的作用有所降低。在超出簡單判定或相對靜止運(yùn)動確定的應(yīng)用中,線性g效應(yīng)和對準(zhǔn)誤差之類的參數(shù)成為噪聲源,通過芯片設(shè)計(jì)方法或器件專用校準(zhǔn)來改善它們需要付出高昂的成本。表6中的使用案例比較了實(shí)際工業(yè)MEMS IMU和消費(fèi)級IMU,二者均有比較好的噪聲性能。然而,消費(fèi)級器件并未針對振動或?qū)?zhǔn)進(jìn)行設(shè)計(jì)或校正。基于給出的假設(shè),本例顯示了器件規(guī)格及其對誤差預(yù)算的影響。總誤差為所示三個誤差源的和方根,消費(fèi)級器件的誤差以線性g和跨軸(對準(zhǔn)誤差)為主,工業(yè)器件則實(shí)現(xiàn)了更好的平衡。最終,不考慮耐用性較差消費(fèi)級產(chǎn)品的其他潛在誤差源的話,二者性能相差至少20倍。
表6. 在動態(tài)運(yùn)動中,線性g和對準(zhǔn)是主要誤差源;工業(yè)器件平衡了所有規(guī)格以使總誤差較低
| 抖動 =(噪聲 + 振動 + 跨軸靈敏度)的和方根 | ||||
| 示例IMU的主要規(guī)格 | 工業(yè) | 消費(fèi)級 | ||
| 性能 | 規(guī)格 | 影響 | 規(guī)格 | 影響 |
| 噪聲密度(°/sec/√Hz) | 0.004 | 0.036 | 0.0100 | 0.089 |
| 線性-g (°/sec/g) | 0.01 | 0.020 | 0.100 | 0.200 |
| 跨軸(%) | 0.09% | 0.090 | 2.00% | 2.000 |
| 預(yù)測誤差(°/sec) | 0.099 | 2.012* | ||
|
假設(shè)條件:50 Hz帶寬,2grms振動,100 °/s離軸旋轉(zhuǎn) *最佳情況:未包括其他漂移因素 |
系統(tǒng)權(quán)衡
大部分復(fù)雜運(yùn)動應(yīng)用需要一個全功能IMU(三軸線性加速度和三軸角速率運(yùn)動)來實(shí)現(xiàn)充分有效的定位。當(dāng)今的IMU既有芯片式(消費(fèi)級),也有模塊式(工業(yè)級),參見圖6中的工業(yè)IMU示例。邏輯上看,消費(fèi)級芯片式IMU的系統(tǒng)集成度似乎更高,但如果最終目標(biāo)是在復(fù)雜的工業(yè)環(huán)境中精準(zhǔn)確定運(yùn)動狀況,則情況正好相反。工業(yè)IMU性能優(yōu)越,而且開箱即可使用。在應(yīng)用的全壽命期間都能可靠地獲得一致的高性能,對系統(tǒng)中校正的要求(如有)極低。消費(fèi)級IMU看似全面集成且很完整,但其實(shí)需要大量額外時間、集成和成本(參見圖7)才能勉強(qiáng)實(shí)現(xiàn)類似水平的性能(通常幾乎是不可能的),而且可能永遠(yuǎn)無法實(shí)現(xiàn)同樣可靠的運(yùn)作。
地點(diǎn)感知型工業(yè)智能傳感器有望大幅提升機(jī)器自動化的效率。系統(tǒng)的精度和可靠性主要取決于核心傳感器質(zhì)量,而不是其周圍的系統(tǒng)和軟件。盡管如此,圍繞高質(zhì)量傳感器的整體集成、嵌入式軟件和連接方法可幫助實(shí)現(xiàn)智能檢測解決方案,從而大大增強(qiáng)信息的質(zhì)量和利用率,同時又不影響同樣重要的安全和可靠性。
-
慣性傳感器
+關(guān)注
關(guān)注
2文章
169瀏覽量
27949 -
自主式
+關(guān)注
關(guān)注
0文章
2瀏覽量
5834
發(fā)布評論請先 登錄
相關(guān)推薦
李大維-創(chuàng)客和山寨:萬眾創(chuàng)新下的新機(jī)遇PPT—中國硬件創(chuàng)新大賽上海培訓(xùn)會
醫(yī)療應(yīng)用的未來發(fā)展充滿新機(jī)遇
高性能慣性檢測解決方案助力自主式機(jī)器應(yīng)用
RFID助力制造業(yè)和航運(yùn)物流迎來新機(jī)遇與挑戰(zhàn)
半導(dǎo)體市場給5G帶來了哪些新機(jī)遇?
高性能慣性檢測解決方案是怎么助力自主式機(jī)器應(yīng)用的?
高性能慣性檢測解決方案助力自主式機(jī)器應(yīng)用
ARM CEO的探討:ARM與飛思卡爾的新機(jī)遇
LED顯示產(chǎn)業(yè)鏈迎來新機(jī)遇
企業(yè)利用AI助力疫情防控,讓企業(yè)發(fā)展迎來了新機(jī)遇
新基建推動,安全產(chǎn)業(yè)迎來新機(jī)遇
LED燈桿屏應(yīng)用迎來市場發(fā)展新機(jī)遇
高通推出RB5自主移動機(jī)器人(AMR)參考設(shè)計(jì)
高性能慣性檢測解決方案 助力自主式機(jī)器應(yīng)用
三網(wǎng)融合推進(jìn)電力貓迎來新機(jī)遇






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論