") 如何構(gòu)建基于圖像的車道偏離安全系統(tǒng)
如何構(gòu)建基于圖像的車道偏離安全系統(tǒng)
簡介
許多處理器控制著當(dāng)今汽車的各個(gè)性能方面,而“車輛體驗(yàn)”的單一功能并未受到技術(shù)的影響。無論是氣候控制,發(fā)動(dòng)機(jī)控制還是娛樂,過去十年來制造商產(chǎn)品的功能都在不斷發(fā)展。這種演變背后的力量之一,信號(hào)處理器的性能成本比迅速提高,即將對另一個(gè)關(guān)鍵的汽車組件 - 安全子系統(tǒng)產(chǎn)生深遠(yuǎn)的影響。
雖然目前大多數(shù)安全可靠功能利用各種傳感器 - 主要涉及微波,紅外線,激光,加速度計(jì)或位置檢測 - 最近才推出處理器,可滿足實(shí)時(shí)計(jì)算要求,允許視頻圖像處理為安全技術(shù)做出重大貢獻(xiàn)。 ADI公司的Blackfin 媒體處理器系列具有高處理速度,多種數(shù)據(jù)移動(dòng)功能和視頻專用接口,為這個(gè)不斷增長的市場提供了極具吸引力的解決方案。本文將討論Blackfin處理器在新興的基于視頻的汽車安全領(lǐng)域可以發(fā)揮的作用。
汽車安全系統(tǒng)中的視頻
在很多方面,汽車安全性可以大大提高通過使用高性能媒體處理器的視頻系統(tǒng)進(jìn)行增強(qiáng)。但是,由于響應(yīng)時(shí)間短對于挽救生命至關(guān)重要,因此必須確定性地實(shí)時(shí)進(jìn)行圖像處理和視頻過濾。自然傾向于使用處理器可以為給定應(yīng)用處理的最高視頻幀速率和分辨率,因?yàn)檫@為決策提供了最佳數(shù)據(jù)。此外,處理器需要再次實(shí)時(shí)地比較車輛速度和相對車輛 - 物體距離與期望條件。此外,處理器必須與許多車輛子系統(tǒng)(例如發(fā)動(dòng)機(jī),制動(dòng),轉(zhuǎn)向和安全氣囊控制器)交互,處理來自所有這些系統(tǒng)的傳感器信息,并向駕駛員提供適當(dāng)?shù)囊暵犦敵觥W詈螅幚砥鲬?yīng)能夠與導(dǎo)航和電信系統(tǒng)連接,以對故障,事故和其他問題作出反應(yīng)并記錄。
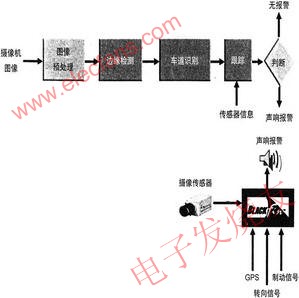
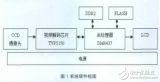
圖1顯示了汽車安全系統(tǒng)的基本視頻操作元素,指示圖像傳感器可能放置在整個(gè)車輛中的位置,以及車道偏離系統(tǒng)如何集成到底盤中。有一些值得注意的事情。首先,多個(gè)傳感器可以由不同的汽車安全功能共享。例如,后部傳感器可以在車輛后退時(shí)使用,以及在車輛向前移動(dòng)時(shí)跟蹤車道。此外,車道偏離系統(tǒng)可以接受來自多個(gè)攝像機(jī)源中的任何一個(gè)的饋送,為給定情況選擇適當(dāng)?shù)妮斎搿T诨鞠到y(tǒng)中,視頻流將其數(shù)據(jù)饋送到嵌入式處理器。在更先進(jìn)的系統(tǒng)中,處理器接收其他傳感器信息,例如來自GPS接收器的位置數(shù)據(jù)。
智能安全氣囊
媒體處理器在汽車安全中的新興用途是用于“智能安全氣囊系統(tǒng)”,其基于部署決定誰坐在受安全氣囊影響的座椅上。目前,基于重量的系統(tǒng)使用最廣泛,但視頻傳感將在五年內(nèi)變得流行。可以使用熱相機(jī)或普通相機(jī),速率高達(dá)每秒200幀,并且可以使用多于一個(gè) - 以提供每個(gè)乘員的立體圖像。目標(biāo)是描述居住者的位置和姿勢 - 而不僅僅是他們的體型。如果發(fā)生沖突,系統(tǒng)必須選擇是完全限制部署,使用較低的力部署還是完全部署。在幫助確定身體姿勢時(shí),圖像處理算法必須能夠區(qū)分人的頭部和其他身體部位。
在該系統(tǒng)中,媒體處理器必須以高幀率獲取多個(gè)圖像流,處理在所有類型的照明條件下分析每個(gè)乘員的大小和位置的圖像,并持續(xù)監(jiān)控位于整個(gè)車內(nèi)的所有碰撞傳感器,以便在幾毫秒內(nèi)做出最佳部署決策。
避碰和自適應(yīng)巡航控制
另一個(gè)備受矚目的安全應(yīng)用是自適應(yīng)巡航控制(ACC),防撞系統(tǒng)的子集。 ACC是一種便利功能,可控制發(fā)動(dòng)機(jī)和制動(dòng)系統(tǒng),以調(diào)節(jié)汽車的速度及其與前方車輛的距離。采用的傳感器包括微波,雷達(dá),紅外和視頻技術(shù)的組合。媒體處理器可以通過安裝在靠近汽車后視鏡的道路上的攝像機(jī)實(shí)時(shí)處理每秒17到30幀的幀。圖像處理算法可以包括用于變化的照明場景的幀到幀圖像比較,對象識(shí)別和對比度均衡。視頻傳感器輸入的目標(biāo)是提供有關(guān)車道邊界和道路曲率的信息,并對障礙物進(jìn)行分類,包括汽車前方的車輛。
ACC系統(tǒng)被宣傳為便利功能,而真正的防撞系統(tǒng)通過協(xié)調(diào)汽車的制動(dòng),轉(zhuǎn)向和發(fā)動(dòng)機(jī)控制器,積極致力于避免事故。因此,由于任務(wù)的復(fù)雜性,關(guān)鍵的可靠性考慮以及法律和社會(huì)后果,它們的發(fā)展速度較慢。據(jù)估計(jì),到2010年,這些系統(tǒng)的部署可能正在順利進(jìn)行。鑒于典型的5年汽車設(shè)計(jì)周期,此類系統(tǒng)設(shè)計(jì)已在進(jìn)行中。
碰撞警告系統(tǒng),如ACC,是碰撞避免類別的子集。這些警告可能即將發(fā)生的事故,但他們沒有積極地避免它。在這個(gè)利基市場中有兩個(gè)主要的子類別:
盲點(diǎn)監(jiān)視器戰(zhàn)斗機(jī)圍繞車輛周邊策略安裝,以提供駕駛員盲點(diǎn)的視覺顯示,并在處理器感知到其他車輛存在時(shí)發(fā)出警告一個(gè)盲區(qū)。在倒檔時(shí),這些系統(tǒng)也可作為備用警告,提醒駕駛員注意車輛后部的障礙物。顯示器可與后視鏡集成,提供車輛周圍環(huán)境的完整無障礙視野。此外,該系統(tǒng)可能包括在車廂內(nèi)的“盲點(diǎn)”視頻,允許駕駛員監(jiān)控后方嬰兒,例如。
Lane - 離開監(jiān)視器 - 這些系統(tǒng)可以通知駕駛員,如果改變車道是不安全的,或者他們是偏離車道還是偏離道路 - 從而有助于檢測駕駛員疲勞。前置攝像頭監(jiān)控汽車相對于道路中心線和側(cè)標(biāo)記的位置,距離汽車前方50至75英尺。如果汽車無意中開始離開車道,系統(tǒng)會(huì)發(fā)出警報(bào)。
車道偏離 - 系統(tǒng)示例
除了媒體處理器在基于視頻的情況下可以扮演的角色汽車安全應(yīng)用,分析這種應(yīng)用的典型組件是有益的。為此,讓我們進(jìn)一步探討可以使用Blackfin媒體處理器的車道偏離監(jiān)控系統(tǒng)。
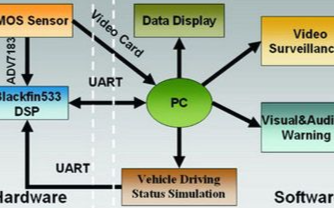
考慮到正在執(zhí)行的信號(hào)處理功能的復(fù)雜性,圖2的整個(gè)系統(tǒng)圖非常簡單。有趣的是,在基于視頻的車道偏離系統(tǒng)中,大部分處理是基于圖像的,并且在信號(hào)處理器內(nèi)而不是通過模擬信號(hào)鏈來執(zhí)行。這代表了系統(tǒng)物料清單的大量節(jié)省。駕駛員的輸出包括警告,以在車輛無意中離開車道之前糾正汽車的預(yù)計(jì)路徑。它可能是一個(gè)可聽見的“隆隆聲”聲音,編程鈴聲或語音信息。
嵌入式處理器的視頻輸入系統(tǒng)必須在惡劣的環(huán)境中可靠地運(yùn)行,包括廣泛和劇烈的溫度變化和改變道路狀況。當(dāng)數(shù)據(jù)流進(jìn)入處理器時(shí),它將實(shí)時(shí)轉(zhuǎn)換為可以處理以輸出決策的形式。在最簡單的級別,車道偏離系統(tǒng)查找車輛相對于道路中的車道標(biāo)記的位置。對于處理器,這意味著必須將輸入的道路圖像流轉(zhuǎn)換為描繪路面的一系列線。
處理器可以通過查找邊緣來查找數(shù)據(jù)字段內(nèi)的線。這些邊緣形成了駕駛員在向前行駛時(shí)應(yīng)保持車輛的邊界。處理器必須跟蹤這些線標(biāo)記并確定是否通知驅(qū)動(dòng)程序不正常。
請記住,其他幾個(gè)汽車系統(tǒng)也會(huì)影響車道偏離系統(tǒng)。例如,使用制動(dòng)系統(tǒng)和轉(zhuǎn)向信號(hào)通常會(huì)在故意換道和慢轉(zhuǎn)時(shí)阻止車道偏離警告。
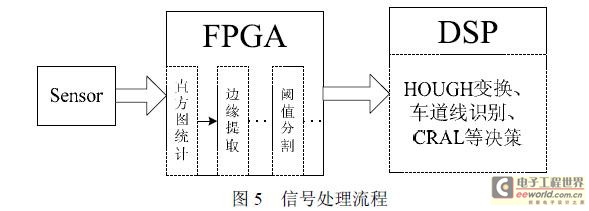
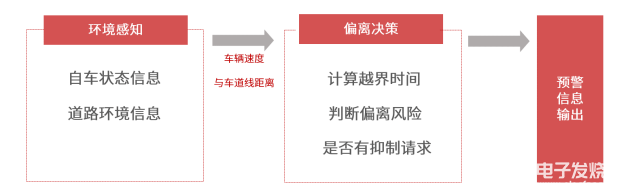
現(xiàn)在讓我們深入了解車道偏離的基本組成部分系統(tǒng)示例。圖3遵循與圖2相同的基本操作流程,但更深入地了解正在執(zhí)行的算法。進(jìn)入系統(tǒng)的視頻流需要經(jīng)過濾波和平滑處理,以減少由溫度,運(yùn)動(dòng)和電磁干擾引起的噪聲。如果沒有這一步驟,就很難找到干凈的車道標(biāo)記。
下一個(gè)處理步驟涉及邊緣檢測;如果系統(tǒng)設(shè)置正確,找到的邊將代表車道標(biāo)記。然后必須將這些線匹配到車輛的方向和位置。 Hough變換將用于此步驟。將跨越圖像幀跟蹤其輸出,并且將基于所有編譯的信息做出決定。最后的挑戰(zhàn)是及時(shí)發(fā)出警告而不發(fā)出誤報(bào)。
圖像采集
Blackfin處理器的一個(gè)重要特性是其并行外設(shè)接口(PPI),用于處理傳入和傳出的視頻流。 PPI無需外部邏輯即可連接各種視頻轉(zhuǎn)換器。除了符合ITU-R 656標(biāo)準(zhǔn)的視頻編碼器和解碼器之外,PPI還可以連接到CMOS相機(jī)芯片和LCD顯示器,這些產(chǎn)品在汽車行業(yè)中很常見。由于它可以實(shí)時(shí)捕獲視頻,因此PPI有助于本文討論的各種自動(dòng)安全應(yīng)用。
在支持ITU-R 656的設(shè)備中,消隱數(shù)據(jù)和活動(dòng)視頻數(shù)據(jù)之間的每個(gè)邊界都是使用嵌入在數(shù)據(jù)流中的4字節(jié)數(shù)據(jù)序列進(jìn)行設(shè)置。 PPI在沒有處理器干預(yù)的情況下自動(dòng)解碼該序列,以收集傳入的活動(dòng)視頻幀。通過這種嵌入式控制方案,物理連接只需要8條數(shù)據(jù)線和一個(gè)時(shí)鐘。
PPI還連接到各種沒有嵌入式控制方案的圖像傳感器和數(shù)據(jù)轉(zhuǎn)換器。在這些情況下,PPI最多提供三個(gè)幀同步來管理傳入或傳出數(shù)據(jù)。對于視頻流,這些幀同步用作物理水平同步,垂直同步和場線(HSYNC,VSYNC和FIELD)。
對于汽車安全應(yīng)用,圖像分辨率通常從VGA(640×480像素/圖像)到QVGA(320×240像素/圖像)。無論實(shí)際圖像大小如何,傳輸?shù)臄?shù)據(jù)格式都保持不變 - 但傳輸?shù)臄?shù)據(jù)較少時(shí)可以使用較低的時(shí)鐘速度。此外,在最基本的車道偏離警告系統(tǒng)中,只需要灰度圖像。因此,數(shù)據(jù)帶寬減半(從16位/像素到8位/像素),因?yàn)榭梢院雎陨刃畔ⅰ?/p>
內(nèi)存和數(shù)據(jù)移動(dòng)
高效的內(nèi)存使用是一個(gè)重要的考慮因素因?yàn)橥獠看鎯?chǔ)器很昂貴,并且它們的訪問時(shí)間可能具有很高的延遲。雖然Blackfin處理器具有片上SDRAM控制器以支持經(jīng)濟(jì)高效地添加更大的片外存儲(chǔ)器,但在僅傳輸所需的視頻數(shù)據(jù)時(shí),明智的做法仍然很重要。通過智能地解碼ITU-R 656前導(dǎo)碼,PPI可以幫助這種“數(shù)據(jù)過濾”操作。例如,在某些應(yīng)用程序中,只需要活動(dòng)視頻字段。換句話說,水平和垂直消隱數(shù)據(jù)可以被忽略,不會(huì)傳輸?shù)絻?nèi)存中,從而導(dǎo)致系統(tǒng)數(shù)據(jù)量減少25%。更重要的是,這種較低的數(shù)據(jù)速率有助于節(jié)省內(nèi)部和外部數(shù)據(jù)總線的帶寬。
由于視頻數(shù)據(jù)速率非常苛刻,因此必須在外部存儲(chǔ)器中設(shè)置幀緩沖器,如圖4所示。在這種情況下,當(dāng)處理器在一個(gè)緩沖區(qū)上運(yùn)行時(shí),PPI通過DMA傳輸填充第二個(gè)緩沖區(qū)。可以設(shè)置簡單的信號(hào)量以保持幀之間的同步。使用Blackfin靈活的DMA控制器,幾乎可以在存儲(chǔ)器填充過程中的任何一點(diǎn)產(chǎn)生中斷,但通常配置為在每個(gè)視頻行或幀的末尾發(fā)生。
一旦完整幀位于SDRAM中,數(shù)據(jù)通常會(huì)傳輸?shù)絻?nèi)部L1數(shù)據(jù)存儲(chǔ)器中,以便內(nèi)核可以以單周期延遲訪問它。為此,DMA控制器可以使用二維傳輸來引入像素塊。圖5顯示了16×16“宏塊”(許多壓縮算法中使用的構(gòu)造)如何通過2D DMA引擎線性存儲(chǔ)在L1存儲(chǔ)器中的示例。
有效導(dǎo)航通過源圖像,需要控制四個(gè)參數(shù):X Count,Y Count,X Modify和Y Modify。 X和Y計(jì)數(shù)分別描述了在“水平”和“垂直”方向上讀入/讀出的元素的數(shù)量。 Horizontal 和 vertical 是此應(yīng)用程序中的抽象術(shù)語,因?yàn)閳D像數(shù)據(jù)實(shí)際上是線性存儲(chǔ)在外部存儲(chǔ)器中。 X和Y修改vaues通過在傳輸必要的X Count或Y Count后指定數(shù)據(jù)“跨越”數(shù)量來實(shí)現(xiàn)此抽象。
從性能角度來看,最多四個(gè)唯一的SDRAM內(nèi)部存儲(chǔ)體可以隨時(shí)激活。這意味著在視頻框架中,當(dāng)2D到1D DMA從一個(gè)銀行提取數(shù)據(jù)而PPI正在向另一個(gè)銀行提供數(shù)據(jù)時(shí),沒有觀察到額外的銀行激活延遲。
投影校正
用于車道偏離系統(tǒng)的攝像機(jī)可以位于前擋風(fēng)玻璃的中心位置,面向前方,位于后擋風(fēng)玻璃中,面向已經(jīng)行駛的道路,或者一個(gè)“鳥瞰”相機(jī),它提供了即將到來的道路最廣泛的視角,因此可以用來代替多個(gè)視線相機(jī)。在后一種情況下,由于廣角鏡頭,視圖會(huì)發(fā)生扭曲,因此在解析圖片內(nèi)容之前必須將輸出圖像重新映射到線性視圖中。
圖像過濾
在進(jìn)行任何類型的邊緣檢測之前,過濾圖像以消除圖像捕獲期間拾取的任何噪聲非常重要。這是必要的,因?yàn)橐脒吘墮z測器的噪聲可能導(dǎo)致檢測器輸出假邊緣。
顯然,圖像濾波器需要足夠快地運(yùn)行以跟上輸入圖像的連續(xù)性。因此,必須優(yōu)化圖像濾波器內(nèi)核以便在盡可能少的處理器周期中執(zhí)行。一種有效的濾波方法是通過基本的二維卷積運(yùn)算完成的。讓我們來看看如何在Blackfin處理器上有效地執(zhí)行此計(jì)算。
卷積是圖像處理的基本操作之一。在二維卷積中,對給定像素執(zhí)行的計(jì)算是來自該像素附近的像素的強(qiáng)度值的加權(quán)和。由于掩模的鄰域以給定像素為中心,因此掩模區(qū)域通常具有奇數(shù)尺寸。掩模尺寸通常相對于圖像較小; 3×3掩模是一種常見的選擇,因?yàn)樗诿總€(gè)像素的基礎(chǔ)上計(jì)算合理,但足以檢測圖像中的邊緣。
3×3內(nèi)核的基本結(jié)構(gòu)如圖6.作為示例,圖像中第20行第10列的像素的卷積處理的輸出將是:
Out (20,10)= A ×(19,9)+ B ×(19,10)+ C ×(19,11)+ D ×(20,9)+ E ×(20,10)+ F ×(20,11)+ G ×(21, 9)+ H ×(21,10)+ I ×(21,11)

可以通過以下步驟描述高級算法:
將遮罩的中心放在輸入矩陣的元素上。
通過相應(yīng)的濾鏡掩碼元素將掩碼鄰域中的每個(gè)像素相乘。
將每個(gè)乘法值相加為單個(gè)結(jié)果。
將每個(gè)和放在與中心對應(yīng)的位置。輸出矩陣中的掩碼
圖7顯示了輸入矩陣F,3×3掩模矩陣H和輸出矩陣G.
計(jì)算每個(gè)輸出點(diǎn)后,掩碼移動(dòng)到右側(cè)。在圖像邊緣,算法環(huán)繞到下一行中的第一個(gè)元素。例如,當(dāng)掩模以元素F2M為中心時(shí),掩碼矩陣的H23元素乘以輸入矩陣的元素F31。結(jié)果,輸出矩陣的可用部分沿著圖像的每個(gè)邊緣減少了一個(gè)元素。
通過正確對齊輸入數(shù)據(jù),可以在單個(gè)處理器周期中使用Blackfin的乘法累加(MAC)單元,一次處理兩個(gè)輸出點(diǎn)。在同一周期期間,多個(gè)數(shù)據(jù)提取與MAC操作并行發(fā)生。該方法允許每次循環(huán)迭代有效計(jì)算2個(gè)輸出點(diǎn),或每個(gè)像素4.5個(gè)循環(huán),而不是圖7中每個(gè)像素的9個(gè)循環(huán)。
邊緣檢測
各種各樣的邊緣檢測技術(shù)是常用的。在考慮如何檢測邊緣之前,算法必須首先確定邊緣實(shí)際的合適定義,然后找到增強(qiáng)邊緣特征的方法以提高檢測機(jī)會(huì)。由于圖像傳感器不理想,因此必須處理兩個(gè)問題 - 噪聲和量化誤差的影響。
圖像中的噪聲幾乎preof video in video taken OVW disease腐choose in inliancesvoltage鬧GF基于許多不易控制的因素,例如環(huán)境溫度,車輛運(yùn)動(dòng)和外部天氣條件,將引入噪音。圖像中的量化誤差將導(dǎo)致邊緣邊界在多個(gè)像素上延伸。這些因素共同作用使邊緣檢測復(fù)雜化。因此,所選擇的任何圖像處理算法都必須將抗噪性作為主要目標(biāo)。
一種流行的檢測方法使用一組基于常見導(dǎo)數(shù)的運(yùn)算符來幫助定位圖像中的邊緣。每個(gè)衍生算子都旨在找到強(qiáng)度發(fā)生變化的地方。在這個(gè)方案中,邊緣可以通過包含理想邊緣屬性的較小圖像建模。
我們將討論Sobel邊緣檢測器,因?yàn)樗子诶斫獠⒄f明了擴(kuò)展到更多原理的原理。復(fù)雜的計(jì)劃。 Sobel Detector使用兩個(gè)卷積核來計(jì)算水平和垂直邊緣的梯度。第一個(gè)用于檢測垂直對比度的變化(S x )。第二個(gè)檢測到水平對比度的變化(S y )。
輸出矩陣為每個(gè)輸出矩陣保持“邊緣似然”幅度(基于水平和垂直卷積)圖像中的像素。然后對該矩陣進(jìn)行閾值處理,以便利用幅度上的大響應(yīng)對應(yīng)于圖像內(nèi)的邊緣的事實(shí)。因此,在霍夫變換階段的輸入處,圖像僅由“純白色”或“純黑色”像素組成,沒有中間漸變。
如果應(yīng)用程序不需要真正的大小,則可以節(jié)省昂貴的平方根操作。構(gòu)建閾值矩陣的其他常見技術(shù)包括對每個(gè)像素的梯度求和或簡單地取兩個(gè)梯度中的最大值。
直線檢測 - Hough變換
霍夫變換是一種廣泛使用的方法,通過將它們本地化在參數(shù)化空間中來查找圖像中的線條,圓形和橢圓形等全局圖案。它在車道檢測中特別有用,因?yàn)榛诘仁?的極坐標(biāo)表示,線可以在Hough變換空間中輕松檢測為點(diǎn):
![]()
這個(gè)等式的含義可以通過延伸從給定直線到原點(diǎn)的垂線來顯示,這樣θ就是垂直與橫坐標(biāo)和θ的角度。是垂直的長度。因此,一對坐標(biāo)(ρ,θ)可以完全描述該線。圖8a中的線L1和L2證明了這一概念。圖8b顯示L1由θ1和紅色垂線的長度定義,而L2由θ 2 和藍(lán)色垂直線的長度定義。
查看Hough變換的另一種方法是考慮一種可以直觀地實(shí)現(xiàn)算法的方法:
僅訪問白色像素在二進(jìn)制圖像中。
對于每個(gè)像素和正在考慮的每個(gè)θ值,從原點(diǎn)以角度θ在像素上畫一條線。然后計(jì)算ρ,它是原點(diǎn)和所考慮的直線之間的垂線長度。
在累積表中記錄這個(gè)(ρ,θ)對。
重復(fù)步驟1
在累積表中搜索最常遇到的(ρ,θ)對。這些對描述了輸入圖像中最可能的“線”,因?yàn)闉榱擞涗浉呃鄯e值,必須有許多白色像素沿著由(ρ,θ)對描述的線存在。
霍夫變換是計(jì)算密集型的,因?yàn)橛?jì)算輸入圖像中每個(gè)像素的正弦曲線。但是,某些技術(shù)可以大大加快計(jì)算速度。
首先,可以提前計(jì)算一些計(jì)算項(xiàng),以便通過查找表快速引用它們。在Blackfin的定點(diǎn)架構(gòu)中,僅為余弦函數(shù)存儲(chǔ)查找表非常有用。由于正弦值與余弦的相位相差90度,因此可以使用具有偏移的相同表格。使用查找表,等式(1)的計(jì)算可以表示為兩個(gè)定點(diǎn)乘法和一個(gè)加法。
可以提高性能的另一個(gè)因素是關(guān)于輸入圖像中車道標(biāo)記的性質(zhì)和位置的一組假設(shè)。通過僅考慮那些可能是車道標(biāo)記的輸入點(diǎn),可以避免大量不必要的計(jì)算,因?yàn)槊總€(gè)白色像素只需要考慮窄范圍的θ值。
a的輸出霍夫變換是一組可能是車道標(biāo)記的直線。這些線的某些參數(shù)可以通過簡單的幾何方程來計(jì)算。可用于進(jìn)一步分析的參數(shù)包括攝像機(jī)中心軸的偏移,檢測到的線的寬度,以及角度相對于相機(jī)的位置。由于許多公路系統(tǒng)中的車道標(biāo)記是標(biāo)準(zhǔn)化的,因此一組規(guī)則可以從車道標(biāo)記候選列表中消除一些線。然后可以使用一組可能的車道標(biāo)記變量來導(dǎo)出汽車的位置。
車道跟蹤
車道信息可以從汽車內(nèi)的各種可能來源確定。該信息可以與車輛相關(guān)參數(shù)(例如,速度,加速度等)的測量值組合以輔助車道跟蹤。基于這些測量的結(jié)果,車道偏離系統(tǒng)可以明智地決定是否正在進(jìn)行無意的離開。在高級系統(tǒng)中,可以建模其他因素,例如一天中的時(shí)間,道路狀況和駕駛員警覺性。
估算車道幾何形狀的問題是一個(gè)挑戰(zhàn),通常需要使用卡爾曼濾波器來估算道路曲率。具體來說,卡爾曼濾波器可以預(yù)測未來的道路信息 - 然后可以在下一幀中使用,以減少霍夫變換所呈現(xiàn)的計(jì)算負(fù)荷。
如前所述,霍夫變換用于尋找線路在每個(gè)圖像中。但是這些線也需要通過一系列圖像進(jìn)行跟蹤。通常,卡爾曼濾波器可以描述為遞歸濾波器,用于估計(jì)對象的未來狀態(tài)。在這種情況下,對象是一條線。線的狀態(tài)基于其位置及其在幾個(gè)幀上的運(yùn)動(dòng)路徑。
隨著道路狀態(tài)本身,卡爾曼濾波器為每個(gè)狀態(tài)提供方差。預(yù)測狀態(tài)和方差可以結(jié)合使用,以縮小未來幀中霍夫變換的搜索空間,從而節(jié)省處理周期。
決策 - 目前的車位或車道交叉時(shí)間
根據(jù)我們的經(jīng)驗(yàn),我們知道誤報(bào)總是不受歡迎的。沒有更快的方法讓消費(fèi)者禁用可選的安全功能,而不是讓它指出不存在的問題。
有了處理框架,系統(tǒng)設(shè)計(jì)人員可以添加自己的知識(shí)產(chǎn)權(quán)( IP)到每個(gè)處理線程的決策階段。最簡單的方法可能是在做出決定時(shí)考慮其他車輛屬性。例如,當(dāng)車道變換被認(rèn)為是有意的時(shí) - 如使用方向指示燈或應(yīng)用制動(dòng)器時(shí),可以抑制車道變換警告。更復(fù)雜的系統(tǒng)可能會(huì)考慮GPS坐標(biāo)數(shù)據(jù),乘員駕駛概況,時(shí)間,天氣和其他參數(shù)。
結(jié)論
在前面的討論中,我們只描述了一個(gè)例子關(guān)于如何構(gòu)建基于圖像的車道偏離系統(tǒng)的框架。我們試圖確定的一點(diǎn)是,當(dāng)靈活的媒體處理器可用于設(shè)計(jì)時(shí),有足夠的空間來考慮功能添加和算法優(yōu)化。
-
傳感器
+關(guān)注
關(guān)注
2552文章
51366瀏覽量
755731 -
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2497瀏覽量
69568 -
控制器
+關(guān)注
關(guān)注
112文章
16442瀏覽量
179018
發(fā)布評論請先 登錄
相關(guān)推薦
汽車車道偏離報(bào)警系統(tǒng)設(shè)計(jì)方案解析
汽車先進(jìn)駕駛員輔助系統(tǒng)ADAS:車道偏離告警系統(tǒng)資料分享
怎么設(shè)計(jì)基于FPGA的車道偏離預(yù)警系統(tǒng)?
ADAS圖像傳感器為提升行車安全和駕乘體驗(yàn)添磚加瓦
怎么實(shí)現(xiàn)單目視覺車道偏離報(bào)警系統(tǒng)的設(shè)計(jì)?
基于機(jī)器視覺的車道偏離預(yù)警系統(tǒng)的實(shí)現(xiàn)
基于圖像處理的車道偏離的研究和實(shí)現(xiàn)
基于機(jī)器視覺的車道偏離預(yù)警系統(tǒng)的實(shí)現(xiàn)
車道偏離報(bào)警(ldw)系統(tǒng)技術(shù)
基于TMS320DM6437的車道偏離報(bào)警系統(tǒng)設(shè)計(jì)
車道偏離預(yù)警系統(tǒng):讓行車更安全,駕駛變得更加簡單
基于DSP芯片和BF-533EZ-KitLite評估板實(shí)現(xiàn)車道偏離報(bào)警系統(tǒng)的設(shè)計(jì)
ADAS車道偏離檢測技術(shù)
儲(chǔ)物柜安全系統(tǒng)的構(gòu)建






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論