

- Load:0 second
- Duration:0 second
- Size:0x0
- Volume:0%
- Fps:59fps
- Sudio decoded:0 Byte
- Video decoded:0 Byte
六軸機器人是哪六個軸
工業機器人在生產中,一般需要配備除了自身性能特點的外圍設備,如轉動工件的回轉臺,移動工件的移動臺等。這些外圍設備的運動和位置控制都需要與工業機器人相配合并要求相應精度。通常機器人運動軸按其功能可劃分為機器人軸、基座軸和工裝軸,基座軸和工裝軸統稱外部軸。
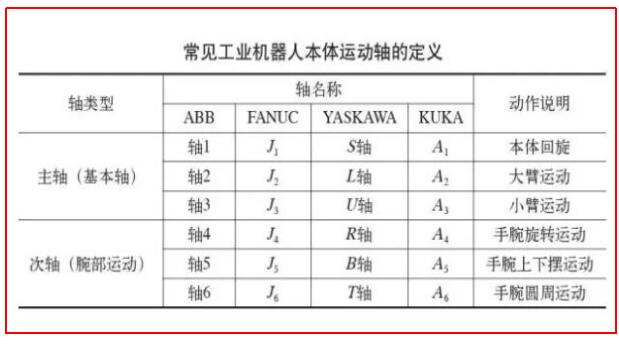
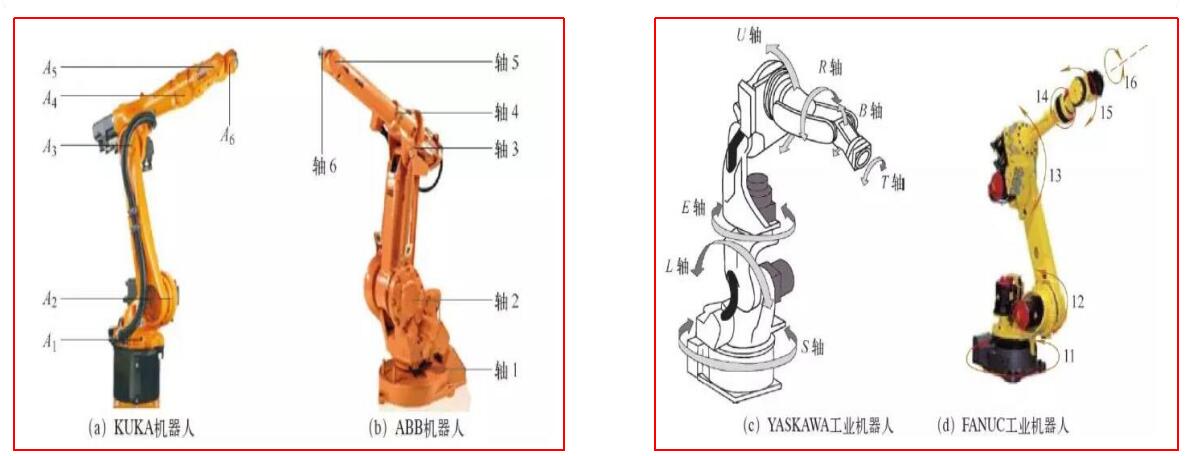
在實際生產中常用的是6關節工業機器人,該操作機有6個可活動的關節(軸),不同的工業機器人本體運動軸的定義也不同。用于保證末端執行器達到工作空間任意位置的軸稱為基本軸或主軸;用于實現末端執行器任意空間姿態的軸,稱為腕部軸或次軸。
六軸的作用
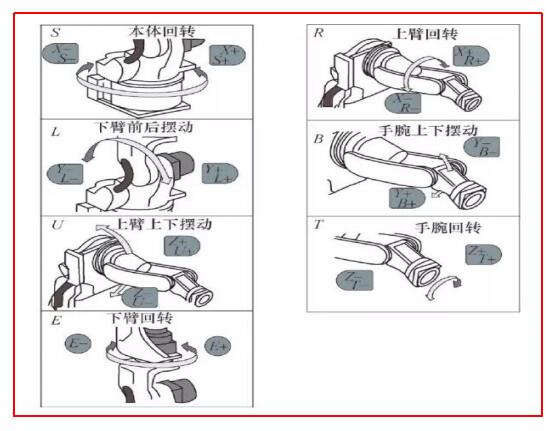
第一軸:第一軸是鏈接底盤的位置,也是承重和核心位置,它承載著整個機器人的重量和機器人左右水平的大幅度擺動。
第二軸:控制機器人前后擺動、伸縮的重要一軸。
第三軸:三軸也是控制機器人前后擺動的一軸,不過擺動幅度比第二軸要小很多,不過這也是六軸機器人臂展長的根據。
第四軸:四軸是控制上臂部分180°自由旋轉的一軸,相當于人的小臂。
第五軸:第五軸很重要,當你差不多調好位置后,你得精準定位到產品上,就要用到第五軸,相當于人手腕部分。
第六軸:當您將第五軸定位到產品上之后,需要一些微小的改動,就需要用到第六軸,第六軸相當于可以水平360°旋轉的一個轉盤。可以更精確定位到產品。

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
六軸機器人
+關注
關注
0文章
42瀏覽量
4581
發布評論請先 登錄
相關推薦
熱點推薦
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系

大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
大象機器人成立于2016年,專注協作機器人研發與應用,產品線涵蓋輕量級協作機器人、人形機器人、仿生機器人等多種形態。拳頭產品myCobot系
發表于 04-25 17:59
人形機器人核心配件之六維力傳感器
隨著科技的飛速發展,人形機器人正逐漸成為現實生活中的一部分。這些機器人不僅在工業生產中發揮著重要作用,還在醫療、科研、服務等多個領域展現出巨大的潛力。而在這類機器人的眾多核心配件中,六
開源項目!基于Arduino控制的六足機器人
這款六足機器人的設計靈感來源于Trossen Robotics的PhantomX AX型號。原版PhantomX(已停產)售價高達1300美元,遠超我的預算,因此我決定采用廉價的180度
發表于 03-03 11:25

安川工業機器人結構
的連接線纜,也可以根據現場的實際需求來進行選配。 --機器人本體各部分組成:由圖可知安川6軸工業機器人可分為機器人底座、S頭、L臂、U臂、手腕法蘭盤,對應一到

嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監控物體在三維空間中的運動、速度、方向和姿態的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業。具體的應用包括但不限于:1.機器人控制:六
發表于 12-02 09:47
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監控物體在三維空間中的運動、速度、方向和姿態的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業。具體的應用包括但不限于:1.機器人控制:六
發表于 11-29 08:57
焊接機器人六個軸分別是什么作用
焊接機器人是現代工業自動化中的重要工具,其靈活性和高效性極大地提升了焊接質量和生產效率。在焊接機器人中,“六軸”是一個常見的結構設計,這

如何正確操作六軸焊接機器人
自動化技術的迅猛發展,六軸焊接機器人已成為現代制造業不可或缺的一部分。它們不僅提高了生產效率,還確保了焊接質量的一致性和可靠性。為了充分發揮其性能,掌握正確的操作方法和注意事項非常重要。今天
高精度六軸MEMS運動跟蹤TM器件ICM-42688-P 數據表
電子發燒友網站提供《高精度六軸MEMS運動跟蹤TM器件ICM-42688-P 數據表.pdf》資料免費下載
發表于 08-12 16:38
?9次下載
深入了解六軸力傳感器:原理、分類與應用
? 在科技飛速發展的今天,傳感器技術作為連接物理世界與數字世界的橋梁,正逐步滲透到各個行業,成為推動技術進步和產業升級的重要力量。其中,六軸力傳感器以其獨特的多維力學測量能力,在機器人技術、自動化






 工商網監
工商網監

評論