 從入門級到高端的四款無人機解決方案
從入門級到高端的四款無人機解決方案
說到無人機,可能讓大家最耳熟能詳的就是DJI(大疆)。大疆,這個無人機行業的奇跡,硬是將原本屬于大眾消遣娛樂、甚至說是兒童玩具的的無人機發展成一個產業。
無人機的基本構成包括主控、電源、電機驅動、電機、各種傳感器如三軸加速度計、陀螺儀、氣壓計、磁力計等,但這些基本的特征已然被大眾所忽略,目前最考驗一個無人機人產品的售賣好壞程度可能就是它所搭載的攝像頭的表現了,攝像頭+云臺已經和無人機形成了天生的絕配,多少人買無人機是為了去看看更高更遠的地方,去看看那些不曾踏足過的地方,古人云“世之奇偉,瑰怪,非常之觀,常在于險遠,而人之所罕至焉,故非有志者不能至也”,而如今有了無人機,我們不必踏至險境就可以去看一看更大的未曾見過的天地。本篇將介紹4種包括從入門級到高端的各種無人機解決方案。
新唐M452飛控套件
新唐M452飛控套件并不是一個完整的無人機方案,僅僅提供了部分核心的組件,而像電機、機架、電調等需要自己另外去配,這樣做雖然增加了用戶的DIY成本,但無疑可以自主選擇DIY理想的飛行器模型。
單看M452飛控套件的飛控板設計,那還是非常精致小巧的,應該還考慮到在四軸機架上的布局擺放,飛控板上的電子元器件都布局在PCB的一面,外設擴展接口則是沿著PCB板周邊布局,方便引出各種信號線。
飛控板的主控是采用了新唐NuMicro M452 USB系列微控制器,基于ARM Cortex-M4處理器,內建DSP以及浮點運算單元,能更好的負責飛行主控功能。同時,飛控板上搭載了用于判斷方向的電子羅盤、用于定高的氣壓計以及穩定的MPU-6050 6軸加速度計/陀螺儀。
M452飛控板上各個傳感器的作用如下:
加速度傳感器的主要作用是利用重力效應給四軸飛行器提供一個水平基準
陀螺儀是用來測量角速度的,其反映的是自身角度的變化
電子羅盤的主要作用是利用地球南北極磁力給四軸飛行器提供一個方向基準
在四軸飛行器的DIY中,飛控板的各個信號連接如下圖所示,可以看到,除了飛行器必備的幾個功能接口,飛控板還給我們預留了藍牙串口接口以及可以接入更多傳感器的擴展IO口,比較實用。
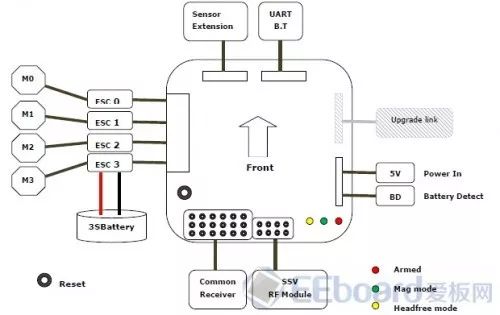
動手實際DIY了基于新唐推M452飛控套件的飛行器,飛行器主要包括M452飛控板+N79E814遙控板+南方硅谷2.4G SSV7241無線收發器模塊,配合新唐提供的資料、代碼以及軟件工具等,用戶可以通過Nu-LINK Me方便的實現對板卡的開發、調試。
小結,M452飛控套件確實是一個非常不錯的無人機DIY開發套件。
英飛凌無人機套件
英飛凌的這款四軸飛行器方案主打的就是完整的系統解決方案,一款可靠的、低功耗的四軸飛行器,不但可以讓你的飛行續航更持久,更可以節省你30%的項目開發周期,主控為自家高端的XMC4500系列微控制器。
套件包含四軸飛行器中主要的飛控以及電調模塊,所以組成一個簡單的、完整的四軸飛行器只需加上電機、鋰電池即可,非常方便。何況,英飛凌本身在說明文檔中推薦了相應的電機、鋰電池規格,更加方便用戶自己DIY。
飛控板做工扎實,畢竟實際調試的時候免不了要時不時的“墜機”,而且英飛凌的飛控板尺寸不算小,這對PCB的強度以及板載的器件都是一個不小的挑戰,除了XMC4500主控制器,飛控板板載器件以及功能接口還包含了:
基于英飛凌XMC4200系類微控制器的調試電路,帶MicroUSB接口
一個MicroUSB接口,GPS信號接口、鋰電池電壓監測接口、無線控制信號接口
RN42藍牙模塊,用于與手機APP實現連接控制
氣壓計 DPS310,用于計算四軸飛行器的定高
9軸傳感器 MPU9250,包含了加速度、磁力計、陀螺儀功能
其中飛控板的電源支持7.4~12.6V供電,電源方面通過英飛凌自家高效率的IFX91041V50 5V DCDC轉換芯片,將輸入電壓轉化為5V直流輸出,再通過IFX1117MEV33 LDO輸出3.3V電壓提供給微控制器、傳感器供電。
電調板
英飛凌的電機驅動板包括了電機控制器,半橋驅動電路、MOS管組成的半橋電路,如下圖所示。
電機控制IC采用的是英飛凌家族XMC1000系列中的XMC1302微控制器,基于ARM Cortex-M0內核,主要用于實時控制如電機驅動等。
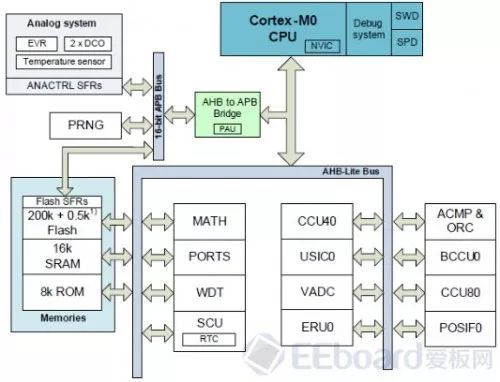
XMC1302微控制器特性:
基于32位ARM Cortex-M0處理器,8KB on-chip ROM、16KB SRAM、200KB Flash
兩個通用串行接口通道(USIC):可用作UART、SPI、I2C、I2S、LIN接口
工業控制外設:CCU4、CCU8、POSIF、BCCU
系統控制單元:WDT、RTC、SCU(用于系統配置和控制)
同XMC4500一樣,作為面向電機控制領域系列產品,XMC1302內部也包含許多特殊的單元,CCU4、CCU8、POSIF,為工程師提供了便利的開發環境。 英飛凌XMC1302微控制器+英飛凌半橋驅動IC IR2301s+英飛凌 BSC0925ND MOS管組成的半橋電路輸出驅動三相電機的U、V、W信號,是整個四軸飛行器電調的核心。
小結,值得一提的是,注意到飛控板+電調板上的元器件,除了個別傳感器外,其他核心器件無一不是英飛凌自家的器件,這才是真正自家完整的系統解決方案。
Sihid COFDM(編碼正交頻分復用)高清圖傳方案
COFDM無線圖像傳輸是目前具有非常大發展潛力的調制技術,其基本原理就是將高速數據流通過串并轉換,分配到傳輸速率較低的若干子信道中進行傳輸,即將頻域中的一個寬帶信道劃分成多個重疊的子信道信號進行窄帶傳輸。COFDM圖傳可以有效的解決兩個問題,一個是移動中傳輸圖像出現的多徑干擾,另一個則是寬帶傳輸,可以實現高質量的圖像畫面。
下面是一款COFDM高清數字無線圖傳開發套件,適合應用于目前對高清無線圖傳有要求的一些移動設備圖傳領域,比如無人機。
Sihid COFDM高清數字無線圖傳開發套包括了一個Sihid COFDM 2.4GHz 雙天線發射機、一個FC2400A 2.4GHz 接收模塊。
Sihid COFDM 2.4GHz 雙天線發射機拆解出來后是一個SEM9363高清編碼調制板以及D-PA2400A功率放大板。
SEM9363高清編碼調制板
要實現圖傳,首選需要采集視頻數據,Sihid SEM9363無線數字圖傳編碼調制板通過MicroHDMI接口輸入高清數字視頻,然后通過板載的海思Hi3516A處理器做視頻壓縮編碼,壓縮后的視頻信號再通過FPGA實現COFDM信道調制,從整個方案來說,這是矽海達圖傳方案的核心所在,調制后的視頻信號再經過AD9363射頻收發器轉換為模擬信號調制發射出去。
另外,SEM9363高清編碼調制板同時將Hi3516A處理器的調試串口、FPGA的JTAG調試口、OSD接口、控制串口、電源等信號集中到D-PA2400A功率放大板的對外接口上。
D-PA2400A功率放大板
D-PA2400A功率放大板包含兩路獨立的射頻功率放大模塊,看起來比較像是Avago的MGA-22003 功率放大器,這兩個功率放大模塊將SEM9363A輸出的射頻信號進行功率放大輸出,如下圖所示。
其實D-PA2400A功率放大板將SEM9363調制板上的Hi3516A調試串口、FPGA JTAG調試口、OSD接口、控制串口、電源等信號都集中擴展出來了,兩款板卡是通過帶pin擴展座的FPC連接器連接,與此同時,SEM9363板的兩個RF輸出分別通過IPEX連接線接到D-PA2400A板的兩個RF輸入接口,D-PA2400A板上的每路功率放大模塊工作參數如下:
工作頻率:2.400GHz ~ 2.483GHz
增益:34±1dB
功率輸出1dB: 31dBm
FC2400A 2.4GHz接收模塊
FC2400A接收模塊下變頻板將接收到的2.4GHz射頻信號轉換為250MHz信號,再通過信道解調模塊進行COFDM解調轉換為數字信號,最后通過USB接口將解調后的數字視頻信號傳給手機(或PC)做H.264解壓播放。
其中,FC2400A板的RF輸出通過射頻線連接到COFDM Demodulator模塊的RF輸入。另外,相信不少工程師對R820T+RTL2832U的硬件組合也是非常熟悉的,這是先前非常流行的電視棒的方案。
FC2400A下變頻板的參數如下:
工作頻率:2.400GHz ~ 2.483GHz
射頻接口:SMA天線接口
接收靈敏度:8MHz時-96±1dbm,6MHz時-97±1dbm
8位參數設置開關(接收與解調參數設置)
Micro USB接口(USB slave),將解調后的視頻接入筆記本平板手機等設備進行H.264解碼播放。
供電電壓:5V
整個圖傳開發套件的基本硬件框圖如下所示。
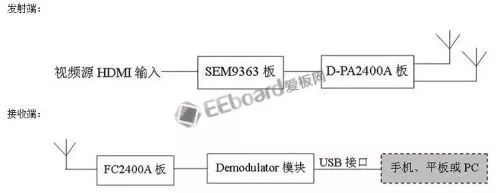
小結,實際試用下來,Sihid COFDM高清數字無線圖傳開發套件的圖傳質量效果還是非常不錯的。另外,除了此次的開發套件,矽海達還可根據客戶應用需要定制不同規格的數字高清無線圖傳產品,比如
通過設計不同規格的PA模塊可支持其它工作頻段和射頻功率;
可更改現有設計增加其它視頻輸入輸出處理接口,如發射端AV輸入、USB輸入、SDI輸入,接收端HDMI輸出、SDI輸出等;
IP協議方式低延時遠距離寬帶數據傳輸等。
大疆曉Spark
大疆曉Spark可以說是DJI推出的一個手勢控制飛行器方案,配置上采用聯芯LC1860C主控+聯芯LC1160 PMU。LC1860C則是當年的紅米2A上的主應用處理器,4個ARM Cortex-A7處理器,主頻1.5GHz,另外集成2核MaliT628 GPU,具備1300萬像素攝像處理能力及1080P@30fps編解碼能力,所以從這里我們也基本能發現Spark錄制視頻的極限,1080P@30fps,LC1160則是配套的電源管理方案。
LC1860C下邊則是美光的閃存+運存顆粒,查FBGA Code可知為具體型號為MT29TZZZ4D4BKERL-125 W.94M,集成了4GB eMMC以及512MB LPDDR3。
LC1160電源管理芯片下邊則是USB2.0 HUB芯片GL850H,再下邊則是曉Spark上的重頭戲芯片Movidius MA2155,全稱視覺處理器Vision Processing Units(VPUs),這是專門為計算機視覺進行優化,可以用于 3D 掃描建模、室內導航、360°全景視頻等更前沿的計算機視覺用途,從而實現像曉Spark上那些功能,如3D圖形感知,手勢識別,智能跟隨等,所以這顆VPU也是無人機的視覺定位系統的核心單元。同時這也是目前邊緣計算中比較出彩的一顆AI芯片,之前英特爾也推出了基于此款芯片的神經計算棒1代,當然目前的話有性能更強大的Intel Myriad X,如果對這感興趣可以看看神經計算棒2代的評測。
曉Spark的飛控也不簡單,采用了Microchip的ATSAME70Q21芯片,基于ARM Cortex-M7處理器,最大主頻達300MHz。飛控旁邊的STM32F303+MP6536組合則是部分電機驅動電路。
曉Spark上的WiFi傳輸方案是采用高通旗下的Atheros AR1021X,這是一顆具備USB2.0接口的2.4G/5.8GHz雙頻WiFi芯片,支持802.11a/b/g/n標準,最高傳輸速度300Mbps。
信號放大部分采用了兩顆功放芯片SKY85809,對應兩個不同頻段的信號,手機控制為2.4GHz頻段,Spark遙控器可以實現5.8GHz的WiFi連接,大疆官方稱Spark可以實現2公里距離的高清信號圖傳,這點實際體驗過,這種情況只能在毫無遮擋物的條件下。
曉Spark的充電管理單元使用了TI的BQ25700升壓充電芯片,配合4顆MOS管,可實現通過5V的手機充電器或普通5V的USB接口充電寶,這也是曉Spark上的一大亮點,不需要取下電池就能給11.4V智能飛行電池實現充電。
小結,從曉Spark的解決方案來看,可謂是麻雀雖小五臟俱全,在和成人手掌差不多大小的情況下,曉Spark實現了諸多創新功能功能的集成,如3D傳感系統、視覺定位系統等,另外,從曉Spark整體的結構和布局也能看出其優秀的系統設計,堪比無人機中的教課書,相信不少用戶可以從模仿中提升自我。
-
傳感器
+關注
關注
2550文章
51039瀏覽量
753087 -
攝像頭
+關注
關注
59文章
4837瀏覽量
95600 -
電機驅動
+關注
關注
60文章
1216瀏覽量
86724 -
無人機
+關注
關注
229文章
10420瀏覽量
180151
原文標題:從入門到高端,4款易于構建的無人機/飛行器方案
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
植保無人機供電系統解決方案
消費級無人機市場的真相解讀!
求無人機入門技術
R3航拍機:史上最小的入門級無人機 語音操控飛行技能滿分
Ameya360 無人機視覺、高級傳感與處理解決方案
無人機續航如何提升至兩小時以上,目前的解決方案是無人機充電寶!
多軸無人機BLDC驅動解決方案
航模/無人機遙控的解決方案
創客火推出新款積木無人機 LiteBee Brix Ⅲ積木無人機
筆記:四旋翼無人機從0到1的實現,目錄鏈接






 工商網監
工商網監
評論