 河海大學提出自主式水下航行器通過這種新方法在海洋深處巡航
河海大學提出自主式水下航行器通過這種新方法在海洋深處巡航
海洋的深處是一個鮮有人去過的黑暗深淵,它長期以來一直是神秘的。但這個陌生的環境仍然攸關我們的利益;科學家們想知道哪里的污染最嚴重,哪里的海底發生地震。被動傳感器可以收集這樣的數據,但在這種陰暗的環境中傳輸數據是一個挑戰。
河海大學的韓光潔和他的同事們提出了一種新方法,自主式水下航行器(AUV)通過這種新方法在海洋深處巡航,能更好地收集這些傳感器的數據。他們的設計于3月27日發表在了IEEETransactionsonMobileComputing上。
照片來源:韓光潔
在東海下水的“C-shark”自主式水下航行器。
每個傳感器(稱為節點)在收集數據時都是靜止不動的。與此同時,一隊AUV被分派到網絡上,沿著預定的軌跡巡航,從每個節點收集數據。
無線電波被水吸收,因此水下傳感器和航行器通常通過聲波信號來發射和接收信息。但是聲波在水中傳播的速度和距離都不及在空中傳播的無線電波。
隨著AUV的增多,挑戰也越來越多。韓教授說:“特別是,由于水聲通信質量差、通信距離短,AUV之間很難直接通信和同步信息。”
更重要的是,不靠近AUV計劃路徑的節點必須將其數據中繼到與AUV足夠接近的其他節點以傳輸數據。這就在網絡中創建了“熱區”,其中一些節點負擔過重,可能耗盡能量并停止運轉。韓教授說,“在熱區的一些節點停止運轉后,熱區附近的節點可能無法找到一個與之通信的鄰居節點,從而導致數據丟失。”
在他們新提出的稱為HAMA(High-Availability data collection scheme based onMulti-AUVs,基于多AUV的高可用性數據收集方案)的方法,AUV能夠調整它們的巡航軌跡,以緩解熱區問題。同樣,HAMA具有故障發現和修復機制,避免了在一些AUV發生故障時數據丟失。如果一個節點試圖向AUV發送數據時發現AUV已發生故障,則它使用多跳通信方法通知其他節點。然后,功能良好的AUV將取代故障AUV來收集數據。
照片來源:韓光潔
一艘自主式水下航行器在水中巡航。
研究人員在許多模擬中測試了他們的方法。韓教授說:“模擬結果表明,與其他算法或方案相比,采用HAMA可以延長網絡的生存期,降低并平衡節點的能量消耗,提高數據包的交付率。”
雖然這種方法確實具有許多優點,但與論文中提到的其他方法相比,它會導致接收信息的延遲時間更長。這在需要及時更新信息時(例如,海底火山正在爆發時),可能是有問題的。韓教授和他的團隊計劃在之后的研究工作中解決這個問題。
韓教授說:“我們認為網絡延遲主要是由數據傳輸時間、數據處理時間和AUV的運動造成的。因此,在未來,我們將從這些方面減少網絡延遲。”
-
傳感器
+關注
關注
2552文章
51341瀏覽量
755533 -
傳輸數據
+關注
關注
1文章
127瀏覽量
16130 -
水下航行器
+關注
關注
0文章
15瀏覽量
8656
原文標題:河海大學提出一種使水下網絡更可靠的路由方案
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一種降低VIO/VSLAM系統漂移的新方法

大華股份榮獲2024年中國創新方法大賽一等獎

利用全息技術在硅晶圓內部制造納米結構的新方法
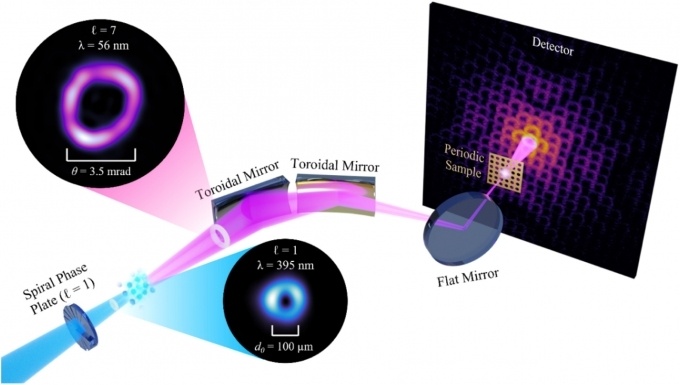
上海光機所提出強激光產生高能量子渦旋態電子新方法

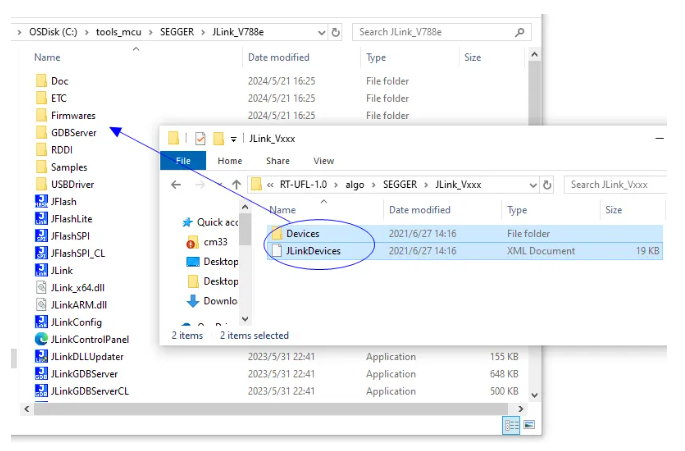
實踐JLink 7.62手動增加新MCU型號支持新方法
一種無透鏡成像的新方法
名單公布!【書籍評測活動NO.36】嵌入式機電一體化系統設計與實現
天津大學海洋學院聲光探測團隊在水下激光雷達探測領域取得新進展

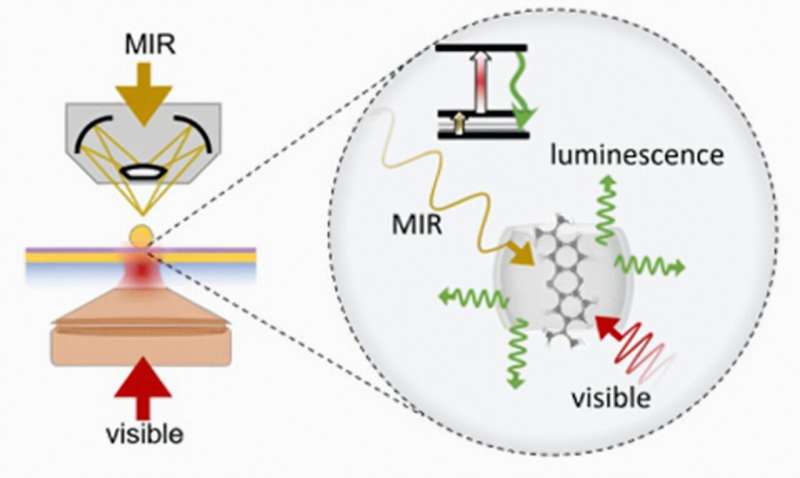
使隱形可見:新方法可在室溫下探測中紅外光
水下航行器電機的SiC MOSFET逆變器設計






 工商網監
工商網監
評論