 揭秘Apollo 3.5開源框架的通信機制如何運作
揭秘Apollo 3.5開源框架的通信機制如何運作
共享內存是指 (shared memory)在多處理器的計算機系統中,可以被不同中央處理器(CPU)訪問的大容量內存。由于多個CPU需要快速訪問存儲器,這樣就要對存儲器進行緩存(Cache)。
在Linux中,每個進程都有屬于自己的進程控制塊(PCB)和地址空間(Addr Space),并且都有一個與之對應的頁表,負責將進程的虛擬地址與物理地址進行映射,通過內存管理單元(MMU)進行管理。兩個不同的虛擬地址通過頁表映射到物理空間的同一區域,它們所指向的這塊區域即共享內存。
進程通信是指進程之間的信息交換。PV操作是低級通信方式(P操作和V操作,P表示申請,V表示釋放)。高級通信方式是指以較高的效率傳輸大量數據的通信方式。高級通信方法主要有以下三類:
共享存儲
在通信的進程之間存在一塊可直接訪問的共享空間,通過對這片共享空間進行寫/讀操作實現進程之間的信息交換。
在對共享空間進行寫/讀操作時,需要使用同步互斥工具(如P操作,V操作),對共享空間的寫/讀進行控制。
消息傳遞系統
在消息傳遞系統中,進程間的數據交換是以消息(Message)為單位的。程序員直接利用系統提供的一組通信命令(原語)來實現通信。
操作系統隱藏了通信的實現細節,大大簡化了通信程序編制的復雜性,因而獲得了廣泛的應用。在消息傳遞系統中,源進程可以直接或間接地將消息傳送給目標進程。
管道通信系統
管道通信是消息傳遞的一種特殊方式。所謂“管道”,是指用于連接一個讀進程和一個寫進程以實現它們之間通信的一個共享文件,又名pipe文件。它是讀寫進程的一個特殊文件(外存,數據量大),允許按照先來先服務的方式傳送數據,也能使進程同步執行。
以下,ENJOY
用戶基于Cyber RT進行開發時,會將自己的模塊抽象為一系列的Component。這些Component既可以加載到同一個進程內運行,也可以加載到不同進程中運行。
目前,同主機不同進程的Component間默認通過共享內存進行通信。相比于其他進程間通信方式,共享內存具備以下幾個優點:
由多個進程共享,適合多進程讀/寫;
通信過程中無系統調用,減少了運行態切換的開銷;
沒有用戶內存和內核內存之間的數據拷貝;
UNIX系統上有著各式各樣的IPC工具。根據工具的功能特點,可以將它們分為三類:
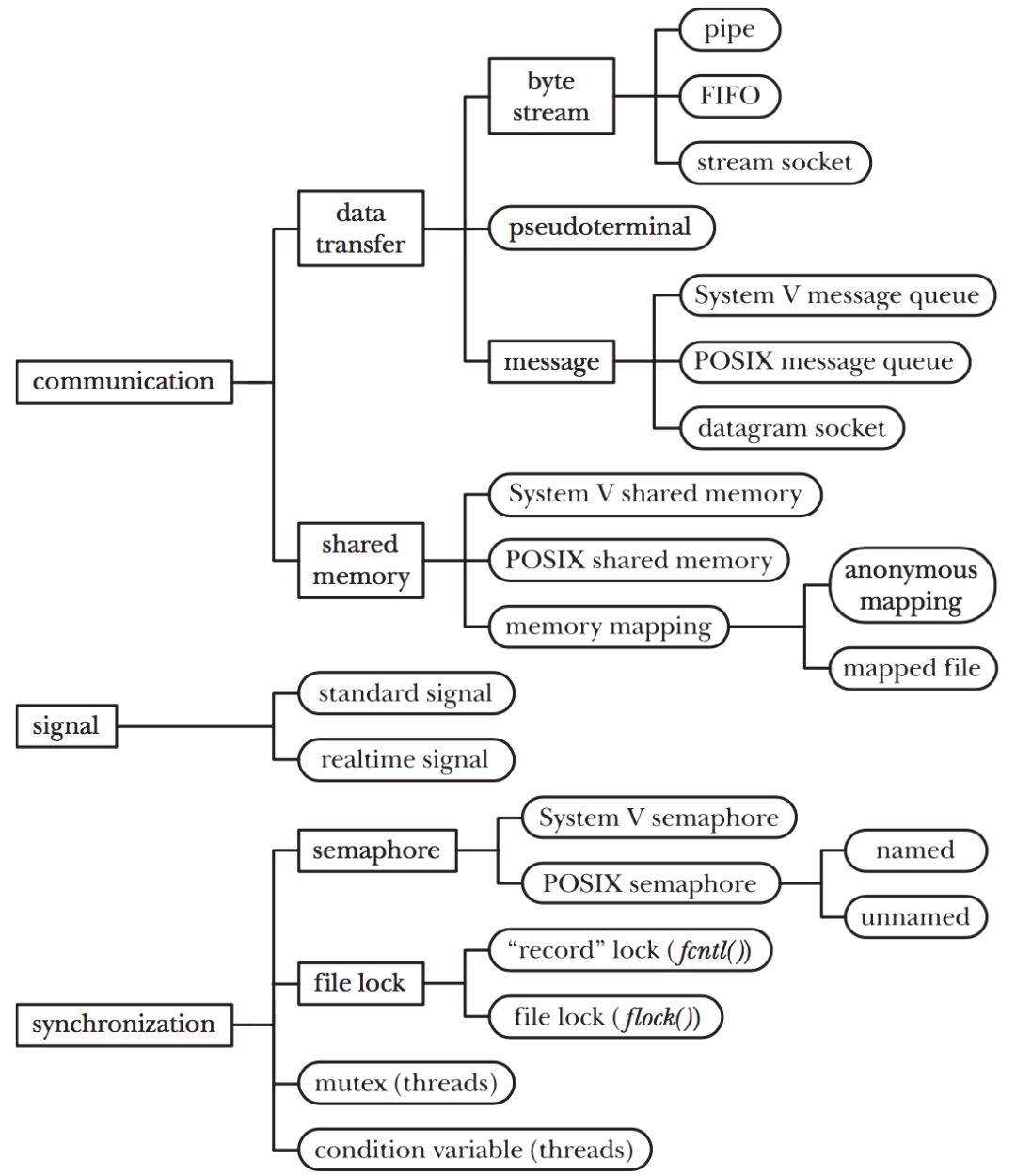
UNIX系統上IPC的結構圖
communication: 這類工具關注的是進程之間的數據傳輸;
signal: 信號既可以用于同步,還可以用于通信(傳遞signal number)。實時信號上還可以綁定數據。
synchronization: 這類工具關注的是進程之間操作的同步;
當然,不同工具的適用場景有所不同。比如pipe只能用于同一臺機器上的進程間通信,而socket卻可以用于網絡通信。
對于communication工具而言,我們可以將其分為兩類:
data transfer: 這類工具一般需要在用戶空間和內核空間之間進行兩次數據傳輸。以pipe為例,ProcessA在寫入數據的時候,需要將數據從用戶空間拷貝至內核空間;ProcessB在讀取數據時,需要將數據從內核空間拷貝至用戶空間。
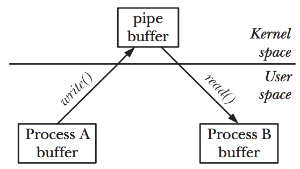
Process的數據傳輸
shared memory: 共享內存允許進程通過將數據放到進程間共享的一塊內存中來完成信息交換。在通信過程中,一方面不需要系統調用,另一方面也沒有用戶空間和內核空間之間的數據傳輸。因此共享內存通信速度比其他data transfer工具要快。
自動駕駛系統中,一些傳感器的消息較大,例如點云,圖像等。另外,錄制全量數據時,消息總的頻率高(2000Hz~3000Hz),傳輸量大(約7GBytes/s)。因此,Cyber RT采取共享內存來進行進程間通信。
Cyber RT進程間通信主要有以下三個步驟:
消息寫入:發送方將消息寫入共享內存區域;
同步:發送方通知接收方有新消息可讀;
消息讀取:接收方從共享內存區域讀取消息;
下面介紹Cyber RT共享內存區域和通知機制的設計。
Cyber RT中所有消息都有對應的channel來標識,比如感知模塊輸出的障礙物消息的channel為"/apollo/perception/obstacles"。一個channel可能有多個writer和多個reader。為了減少內存拷貝,每個channel只有唯一的一塊共享內存區域(Segment)。該channel的所有writer和reader都通過這塊區域進行消息傳輸。
Segment在內存中的布局如下:
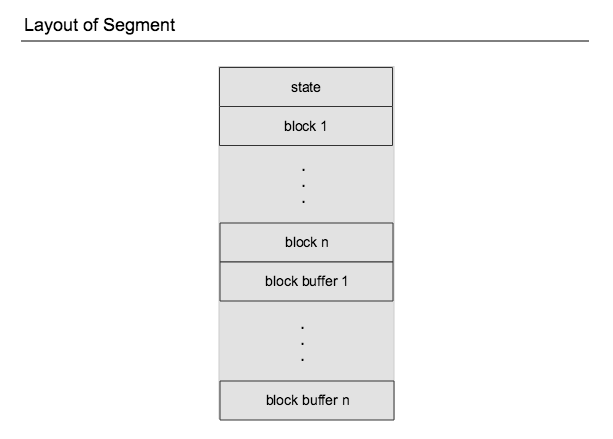
內存中Segment的布局
state: 描述了當前Segment的狀態,包含已經寫入的消息數量等信息;
block: 用于標記block buffer的讀寫狀態。block的數量是由該Segment傳輸消息的大小決定的。比如消息小于16KBytes時,block數量為512。
block buffer: 用于存放序列化后的消息,數量與block一致。
Segment對外的主要接口如下:
1//structWritableBlock{ 2//uint32_tindex=0; 3//Block*block=nullptr; 4//uint8_t*buf=nullptr; 5//}; 6//usingReadableBlock=WritableBlock; 7 8classSegment{ 9public:10...11boolAcquireBlockToWrite(std::size_tmsg_size,WritableBlock*writable_block);12voidReleaseWrittenBlock(constWritableBlock&writable_block);1314boolAcquireBlockToRead(ReadableBlock*readable_block);15voidReleaseReadBlock(constReadableBlock&readable_block);16...17};
Acquire與Release應當成對出現。
發送方將消息寫入到共享內存區域后,需要通知接收方有新消息可讀。為了減少線程使用,Cyber RT采取了單線程監聽。有一個專門的Dispatcher來執行監聽操作,同一進程內的所有接收者都委托這個Dispatcher來進行監聽。
在具體實現上,經典的做法是采用mutex+condition_variable。當沒有新消息可讀時,Dispatcher在condition_variable上執行wait操作。發送方寫入消息后,執行notify操作。然而,實際測試發現notify有一定的抖動。因此,最終還是采取了輪詢的方式實現。
另外,Cyber RT還實現基于UDP組播的通知機制。目前,默認采取UDP組播來通知。
開發者可以通過修改cyber/conf/cyber.pb.conf中transport_conf的notifier_type來更改通知機制。
1transport_conf{ 2shm_conf{ 3#"multicast""condition" 4notifier_type:"multicast" 5shm_locator{ 6ip:"239.255.0.100" 7port:8888 8} 9}10participant_attr{11lease_duration:1212announcement_period:313domain_id_gain:20014port_base:1000015}16communication_mode{17same_proc:INTRA18diff_proc:SHM19diff_host:RTPS20}21resource_limit{22max_history_depth:100023}24}
消息從ShmTransmitter發出,到ShmReceiver收到的完整過程如下圖所示:
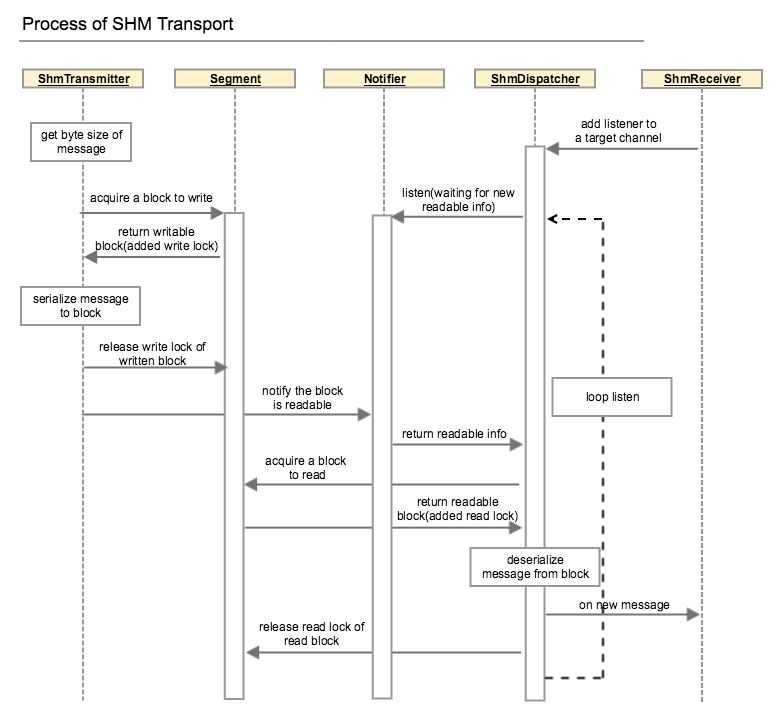
SHM Transport通信過程
ShmTransmitter:消息發送方。
ShmReceiver:消息接收方。
Segment:共享內存區域的抽象,內部包含一個循環隊列(一系列blocks),每個block均可進行讀寫操作。
Notifier:用于發送/監聽共享內存可讀通知。
ShmDispatcher:代替ShmReceiver進行共享內存監聽和數據讀取。
Cyber RT與Apollo ROS的進程間通信都是使用的共享內存。相比于Apollo ROS,Cyber RT主要做了以下兩個方面的改進。
之前消息傳輸過程中有4次數據拷貝:
serialize message to a string;
copy data of string to shared memory area;
copy data of shared memory area to a string;
deserialize message from string;
改進后,去除了中間變量string的使用,只保留必要的2次數據拷貝。
Cyber RT實現了一系列高性能的基礎數據結構,如ReadWriteLock, AtomicHashMap等。
在通信相關的代碼實現中,大量使用了上述基礎數據結構,從而進一步提升了性能。
對比發現,Cyber RT進程間傳輸性能優于Apollo ROS。
Cyber RT與Apollo ROS傳輸性能比較
本文首先介紹了常見的IPC工具,然后結合自動駕駛的實際場景,解釋了使用共享內存進行進程間通信的原因。之后,圍繞通信的過程,介紹了共享內存區域和通知機制的設計。最后,對比了Cyber RT和Apollo ROS的進程間傳輸性能。
-
通信機制
+關注
關注
0文章
13瀏覽量
7391 -
開源框架
+關注
關注
0文章
32瀏覽量
9412 -
Apollo
+關注
關注
5文章
342瀏覽量
18443
原文標題:技術文檔丨Cyber RT 進程間通信
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
[資料分享]+Android框架揭秘
開源框架教程(二)—— iOS APP開發
物聯網APP開源框架教程(二)—— iOS APP開發
機智云開源框架介紹
【HarmonyOS】應用開發3-HarmonyOS應用程序框架揭秘
Apollo Heritage版音頻接口附帶的插件
百度全球首發的Apollo3.5將在美國貨車上率先試用

Apollo 3.5發布,版本更新一覽(附下載鏈接)

無線通信模塊管理框架RIL簡介






 工商網監
工商網監
評論