


當水下航行器航行時所處的水下環境惡劣或較深時,大多數基于視覺的技術手段受限。物競天擇,生物進化出了各種各樣的可用于導航、空間定位、捕食和目標監測的高靈敏度流場傳感器,為研究人員開發新型導航避障用流場感知器件提供了新思路。
北京航空航天大學仿生與微納系統研究所蔣永剛、張德遠教授于4月18日在線發表了仿魚類側線流場感知的前沿綜述文章。該綜述從魚類側線系統及人工側線系統兩個方面總結了近年來側線感知的研究成果。首先,該綜述重點總結了體表神經丘和管道神經丘的高靈敏度流場感知機制,并概述了相應的流場感知算法。其次,探討了基于不同傳感機理的各式人工側線系統,并著重綜述了基于聚合物的仿生流場傳感器領域內的最新進展。
(1)魚類側線增強感知新機制
魚側線系統由眾多分布在魚體上的神經丘組成,如圖1a所示。作為側線系統的功能單元,神經丘是由機械感覺纖毛和非感覺細胞組成的小型感知器官(圖1b)。毛細胞內的纖毛束由一個動纖毛和幾個較短的呈梯度排布的靜纖毛組成(圖1c)。神經丘內的纖毛束伸入透明的壺腹頂內,壺腹頂將外部的機械刺激傳遞到纖毛束,致使纖毛束頂端的離子通道打開或者關閉,進而產生神經信號(圖1d)。根據神經丘的位置不同,可以將其分為兩大類:位于皮膚表面的體表神經丘(圖1e)和位于皮下管道內的管道神經丘(圖1f)。
該綜述探討了魚類側線的增強感知機制。神經丘的壺腹頂是神經丘與外部環境接觸的生物力學界面,其形貌對神經丘的靈敏度具有重要影響。側線管道不僅可以保護管道神經丘不受機械損傷,還可以作為機械濾波器過濾低頻噪音,且其形貌對管道神經丘的靈敏度有很大的影響。通過測量微管道內外的粒子位移,Denton和Gray提出了側線管道的經典力學模型,該模型表明:大直徑的管道比小直徑的管道具有更高的靈敏度。一些魚類的側線管道在管道神經丘附近具有變徑結構,其功能主要有:1)進一步衰減低頻域的響應;2)增大管道側線的截止頻率;3)使管道側線在高頻區域具有更高的靈敏度。
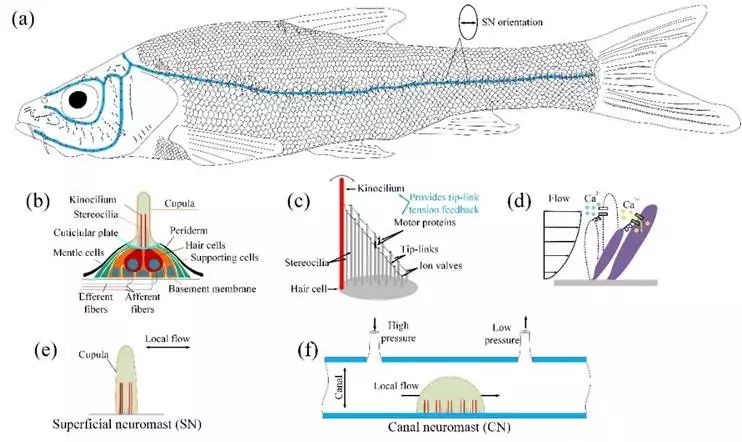
圖1 魚側線系統。(a)魚側線分布;(b)側線神經丘微觀結構特征;(c)毛細胞微觀結構;(d)纖毛頂端的離子通道;(e)體表神經丘;(f)管道神經丘。
同時,該綜述概述了側線感知流場算法。偶極子常作為在側線研究中的水動力刺激,用以模仿水生生物的尾部拍打等動作。2008年,Goulet等人提出了魚側線對偶極子在二維(圖2a-b)及三維空間(圖2c-e)內的定位算法。趨流性是魚類在水流中的一種朝向行為。通過行為學實驗,1997年,Montgomery等人認為體表側線系統協助魚類完成趨流性這一行為(圖2f)。2017年,Oteiza等人報道了斑馬魚在沒有視覺信息的情況下可以利用速度梯度來完成趨流性行為,并提出了一種基于局部速度梯度的魚類感知流場新算法(圖2g)。
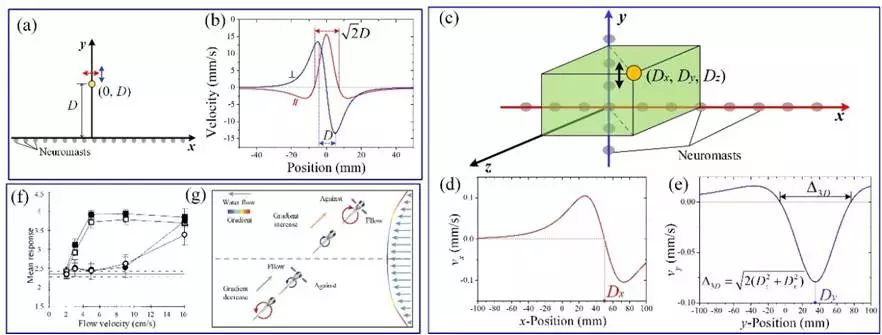
圖2 魚類側線流場感知算法。偶極子在二維空間(a-b)和三維空間(c-e)內的定位;(f-g)趨流性行為流場感知機理。
(2)高靈敏度仿側線傳感器
具有高靈敏和高精度流場感知能力的魚類側線系統激發了研究人員對高靈敏度仿側線傳感器的開發。體表側線神經丘在魚類捕食、趨流性等行為中起著重要作用,其可以感知到小于10??m/s的流速。美國伊利諾伊大學厄巴納-香檳分校(UIUC)的Liu和Yang等人研發了壓阻式和熱線式的仿側線高靈敏度流速傳感器,實現了2.5μm/s的最小流速檢測(圖3a-e)。新加坡麻省理工學院研究與技術聯盟的Miao和Triantafyllou等人開發了各種基于壓電和壓阻傳感機理的柔性仿側線高靈敏度傳感器,成功實現了最小流速8.2 μm/s的探測(圖3f-g)。荷蘭格羅寧根大學的van Netten 等人研發了基于光纖光柵的高靈敏度仿側線流速傳感器,達到了特定頻率下5μm/s的流速感知能力(圖3k)。意大利理工學院的Rizzi等人、美國密歇根大學的Tan研究團隊相繼提出了基于柔性傳感懸臂梁的高靈敏度仿側線流速傳感器(圖3l-m)。
圖3 各種仿側線流速傳感器
與體表側線相比,管道側線可以過濾低頻噪音,具有高通濾波器的功能,且管道側線可以探測到0.001Pa/mm量級的壓力梯度。受魚類管道側線啟發,很多研究人員研發了隔膜式壓力傳感器,實現了最小1Pa壓力分辨率(圖4a-c)。2011年,美國伊利諾伊大學厄巴納-香檳分校的Liu等人提出了一種基于硅壓阻懸臂梁的人工管道側線,成功實現了管道的過濾功能(圖4d)。2015年,德國波恩大學的Bleckmann課題組提出了一種基于柔性光波導的人工管道側線,實現了管道內185μm/s的速度檢測(圖4e)。2014年,新加坡南洋理工大學的Miao等人提出了一種基于金壓阻單元的仿生管道側線,驗證了管道側線的過濾功能(圖4f)。2017年,北京航空航天大學的蔣永剛等人提出了一種基于聚偏二氟乙烯(PVDF)壓電薄膜的柔性仿生管道側線,不僅實現了管道側線的高通濾波功能,而且實現了兩側線孔間0.11Pa的壓差檢測(圖4g)。
(3)挑戰與展望
本文對提升流場靈敏度、傳感器的耐久性及融合感知機制所面臨的技術挑戰進行了深入討論。在如何提升流場傳感器靈敏度方面,主要觀點為:1)人工側線傳感器可以利用自身結構的諧振頻率特性提升其靈敏度;2)人工管道側線傳感器可以通過引入變徑結構來提升其靈敏度及其過濾性能;3)將前置放大器集成在傳感單元附近,可降低壓阻式和壓電式傳感器受到的強電磁干擾,以提升傳感器的靈敏度。在傳感器的耐久性方面,該綜述總結歸納了幾種提升水下傳感器防水性能的方法。在傳感器分布及融合感知機制方面,該綜述認為:1)模仿側線神經丘的分布特征進行優化傳感器的空間分布,可以減少傳感器的使用數量及降低經濟成本;2)魚類是運用體表側線(流速傳感器)和管道側線(壓力傳感器)的融合感知機制捕捉周圍的流場信息,而現有的人工側線系統多由單一傳感模態的流場傳感器組成。所以,開發具有流速/壓力融合感知功能的人工側線系統將是一項十分有前景的研究。
圖4 仿側線壓力傳感器
相關研究成果以"Flow fieldperception based on the fish lateral line system"為題發表于學術期刊Bioinspir. Biomim.上(DOI: https://doi.org/10.1088/1748-3190/ab1a8d) 。該項工作得到了國家自然科學基金(GrantNo.51575027)的資助。
-
傳感器
+關注
關注
2567文章
53080瀏覽量
768256 -
水下航行器
+關注
關注
0文章
16瀏覽量
8773
原文標題:北航仿生與微納系統研究所發表仿魚側線流場感知前沿綜述
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
風光互補技術及應用新進展
風光互補技術原理及最新進展
車聯網技術的最新進展
CMOS圖像傳感器的最新進展及應用
VisionFive 2 AOSP最新進展即將發布!
聚合物在生物傳感器中的應用研究進展
數據流盤高速存儲讀取技術最新進展
關于深度學習的最新進展
ASML***的最新進展





 工商網監
工商網監

評論