") 汽車(chē)與其他領(lǐng)域跨界融合加速 新的挑戰(zhàn)呼吁車(chē)路協(xié)同
汽車(chē)與其他領(lǐng)域跨界融合加速 新的挑戰(zhàn)呼吁車(chē)路協(xié)同
看點(diǎn):國(guó)內(nèi)車(chē)路協(xié)同技術(shù)研究領(lǐng)頭人詳解車(chē)路協(xié)同的過(guò)去、現(xiàn)在和未來(lái)。
4月19日,GTIC 2019全球智能汽車(chē)供應(yīng)鏈創(chuàng)新峰會(huì)在2019上海車(chē)展同期舉辦,大會(huì)邀請(qǐng)到來(lái)自學(xué)術(shù)界、整車(chē)企業(yè)、零部件企業(yè)、互聯(lián)網(wǎng)公司、新興自動(dòng)駕駛公司和人工智能公司等智能汽車(chē)供應(yīng)鏈領(lǐng)域的15位嘉賓登臺(tái),探討智能汽車(chē)時(shí)代的供應(yīng)鏈創(chuàng)新與出行變革。
國(guó)內(nèi)車(chē)路協(xié)同技術(shù)的研究領(lǐng)頭人,清華大學(xué)自動(dòng)化系教授、自動(dòng)化系系統(tǒng)工程研究所所長(zhǎng)張毅教授為大會(huì)作了開(kāi)場(chǎng)演講。
張毅教授講到,汽車(chē)產(chǎn)業(yè)在與IT、通信等領(lǐng)域跨界融合時(shí)面臨新的挑戰(zhàn),呼吁車(chē)路協(xié)同技術(shù)予以解決。我國(guó)自2011年起開(kāi)始立項(xiàng)研究車(chē)路協(xié)同技術(shù),用7年多的時(shí)間已經(jīng)走過(guò)了美國(guó)14年走過(guò)的道路,目前已進(jìn)入規(guī)模應(yīng)用階段。
他指出,車(chē)路協(xié)同技術(shù)的發(fā)展應(yīng)用既能提升交通安全,還能提升交通控制效率,同時(shí)還將促使自動(dòng)駕駛技術(shù)的落地與發(fā)展,將讓交通體系跨入新階段。
汽車(chē)與其他領(lǐng)域跨界融合加速 新的挑戰(zhàn)呼吁車(chē)路協(xié)同
張毅教授在一開(kāi)場(chǎng)就講到,現(xiàn)階段的汽車(chē)產(chǎn)業(yè)正在快速發(fā)展之中,不僅是車(chē)企在快速提升汽車(chē)各方面的技術(shù)和水平,同時(shí)還有IT、通信等領(lǐng)域等玩家也在快速切入。例如Uber本身是一家從事共享交通的公司,但其同時(shí)還在從事自動(dòng)駕駛、貨運(yùn)等方面的技術(shù)研究。
“我們發(fā)現(xiàn)汽車(chē)的發(fā)展已經(jīng)不單單是汽車(chē)本身,它已經(jīng)進(jìn)入了一個(gè)跨界融合的時(shí)代。”張毅教授講道。
不過(guò),隨著汽車(chē)與智能、通信等領(lǐng)域出現(xiàn)大量融合,相應(yīng)的問(wèn)題與挑戰(zhàn)也逐漸暴露。例如2018年3月18日,一輛Uber的自動(dòng)駕駛測(cè)試車(chē)就在美國(guó)亞利桑那州出交通事故致使一名行人死亡。

張毅教授指出,目前還沒(méi)有公開(kāi)的技術(shù)報(bào)告分析這起事故,但已知的信息是這輛自動(dòng)駕駛汽車(chē)的感知系統(tǒng)已經(jīng)感知到了行人的信息,因此問(wèn)題可能出現(xiàn)在車(chē)輛的決策系統(tǒng)上,即車(chē)輛的決策系統(tǒng)在做“這是不是一個(gè)人?”、“是不是需要停下來(lái)?”的決策時(shí)出了問(wèn)題。
“汽車(chē)的跨界融合過(guò)程中還有許多問(wèn)題沒(méi)法逾越,還有很多問(wèn)題需要解決。”張毅教授總結(jié)道,“只有智能的汽車(chē)是不夠的,還需要智能的路、智能的網(wǎng)、智能的交通,它們結(jié)合起來(lái)就是車(chē)路協(xié)同。”
車(chē)路協(xié)同的兩大關(guān)鍵應(yīng)用點(diǎn):安全與控制
張毅教授在現(xiàn)場(chǎng)表示,車(chē)路系統(tǒng)會(huì)帶來(lái)新的交通理念,讓交通發(fā)展跨入新的階段。
簡(jiǎn)單說(shuō)就是用現(xiàn)有的通信技術(shù)將所有的汽車(chē)連接起來(lái)構(gòu)成一個(gè)平臺(tái),讓任何車(chē)輛在任何時(shí)間和任何地點(diǎn)都能做到信息共享和交互。
在發(fā)展車(chē)路協(xié)同技術(shù)的過(guò)程中,有兩大關(guān)鍵應(yīng)用點(diǎn),一個(gè)是安全,一個(gè)是控制。
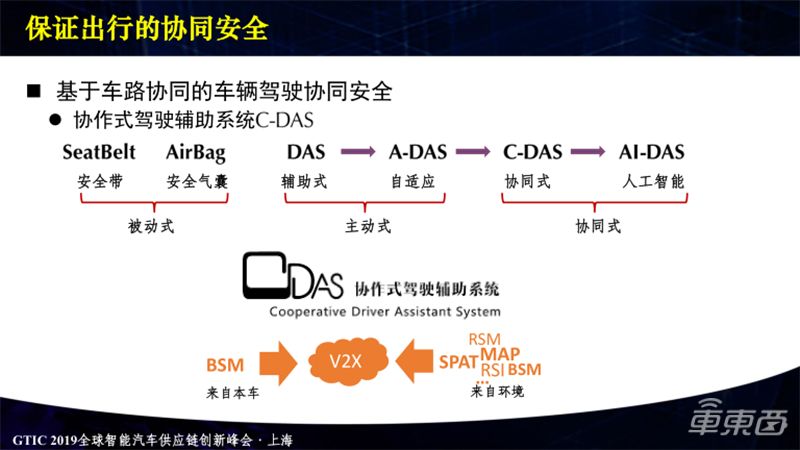
安全方面,車(chē)路協(xié)同的信息交換平臺(tái),可以幫助現(xiàn)有的交通體系從被動(dòng)安全向主動(dòng)式安全,以及下一步的協(xié)同安全方向前進(jìn),即現(xiàn)有的安全體系會(huì)從第一代的安全帶、第二代的安全氣囊,向著第三代的V2V通信方向轉(zhuǎn)變。
張毅教授講到,現(xiàn)在的自動(dòng)駕駛汽車(chē)還在用單車(chē)智能的方式進(jìn)行運(yùn)作,即車(chē)輛感知到對(duì)面來(lái)車(chē)后,還要想辦法感知它想要干什么,然后再進(jìn)行駕駛決策。決策完了還要看下一步的變化,這是一個(gè)很復(fù)雜的信息交互決策控制過(guò)程。
但有了車(chē)路協(xié)同技術(shù)后,車(chē)輛之間就馬上知道對(duì)方的位置、速度、加速度、剎車(chē)與否、轉(zhuǎn)向與否等信息,大大簡(jiǎn)化了自動(dòng)駕駛汽車(chē)的信息收集和決策難度。
基于這種技術(shù),車(chē)路協(xié)同還將促進(jìn)現(xiàn)有的ADAS高級(jí)駕駛輔助系統(tǒng)向著CDAS協(xié)同式輔助駕駛系統(tǒng),以及AI-DAS人工智能駕駛輔助系統(tǒng)方向發(fā)展。
控制方面,車(chē)路協(xié)同的信息交換平臺(tái),既可以在交通體系內(nèi)實(shí)現(xiàn)多車(chē)車(chē)速引導(dǎo),又可以讓現(xiàn)有信號(hào)燈從被動(dòng)控制向主動(dòng)控制,以及下一步的協(xié)同控制階段發(fā)展。
此前,國(guó)內(nèi)在交通測(cè)試研發(fā)中有一個(gè)單車(chē)車(chē)速引導(dǎo)的提法,即在車(chē)輛通過(guò)路口時(shí)會(huì)收到推薦的車(chē)速信息,幫助順利通行,減少停車(chē)從而減少排放,但問(wèn)題是無(wú)法解決其他車(chē)輛的車(chē)速引導(dǎo)問(wèn)題。
在有了車(chē)路協(xié)同平臺(tái)后,可利用交匯點(diǎn)協(xié)同的機(jī)理計(jì)算出每輛車(chē)的最優(yōu)速度并發(fā)布至各個(gè)車(chē)輛,從而實(shí)現(xiàn)多車(chē)速度引導(dǎo),進(jìn)而實(shí)現(xiàn)更高效的通行。

現(xiàn)有的信號(hào)燈是被動(dòng)控制,即在了解到多少汽車(chē)到來(lái)后調(diào)整信號(hào)配時(shí),沒(méi)法引導(dǎo)汽車(chē)。想要主動(dòng)控制,就要實(shí)現(xiàn)單車(chē)和多車(chē)速度引導(dǎo),將其引導(dǎo)成一個(gè)一個(gè)車(chē)隊(duì),每個(gè)綠燈放行一個(gè)車(chē)隊(duì)。
同時(shí)信號(hào)燈和車(chē)隊(duì)也要實(shí)現(xiàn)交互,信號(hào)燈的配時(shí)也會(huì)隨著車(chē)隊(duì)的變化而變化,從而讓信號(hào)燈控制邁上一個(gè)新的臺(tái)階。
車(chē)路協(xié)同在我國(guó)的應(yīng)用實(shí)踐:7年走完美國(guó)14年的路
張毅教授講到,美國(guó)在2004年就開(kāi)始立項(xiàng)進(jìn)行車(chē)路協(xié)同相關(guān)的研發(fā),雖然叫做其他的名字,但本質(zhì)是一樣的。美國(guó)從項(xiàng)目立項(xiàng)、到測(cè)試場(chǎng)測(cè)試,到真實(shí)道路實(shí)施,總計(jì)用了14年的時(shí)間。
我國(guó)從2002年提出了這個(gè)概念,但真正國(guó)家立項(xiàng)開(kāi)始研究是2011年。到現(xiàn)在,我們已經(jīng)走過(guò)了從立項(xiàng)、到測(cè)試場(chǎng)測(cè)試,再到具體的工程應(yīng)用所有階段,相當(dāng)于用7年多的時(shí)間,走完了美國(guó)人14年的路。
具體來(lái)說(shuō),我國(guó)的車(chē)路協(xié)同最早基于張毅教授所在的國(guó)家863計(jì)劃研究組的研究成果,在我國(guó)第一個(gè)智能網(wǎng)聯(lián)汽車(chē)測(cè)試場(chǎng)——上海國(guó)際汽車(chē)城進(jìn)行了示范,隨后推廣到了二十幾輛公交車(chē)上,再到重慶、北京、福建等地的測(cè)試場(chǎng)的規(guī)模化長(zhǎng)期測(cè)試。

目前,車(chē)路協(xié)同技術(shù)將在中國(guó)最快的高速公路杭紹勇高速、冬奧會(huì)等項(xiàng)目中實(shí)現(xiàn)規(guī)模化應(yīng)用。
去年11月,國(guó)內(nèi)還實(shí)現(xiàn)了不同車(chē)企、不同通訊模式、不同終端系統(tǒng)的“三跨”式車(chē)路協(xié)同,而今年交通部、工信部、公安部也將實(shí)現(xiàn)跨部門(mén)聯(lián)合部署,真正推動(dòng)車(chē)路協(xié)同在中國(guó)的大規(guī)模應(yīng)用。
“車(chē)路協(xié)同作為一個(gè)大的技術(shù)領(lǐng)域,大規(guī)模應(yīng)用和推廣已經(jīng)成為了現(xiàn)代道路交通里面必然的發(fā)展趨勢(shì)。”張毅教授總結(jié)道。
車(chē)路協(xié)同是自動(dòng)駕駛發(fā)展的第三條路徑
正是由于車(chē)路協(xié)同對(duì)交通體系發(fā)展的重要作用,交通部副部長(zhǎng)劉小明2018年在中國(guó)電動(dòng)汽車(chē)百人會(huì)的論壇上提出,要高度重視自動(dòng)駕駛和車(chē)路協(xié)同等前瞻性技術(shù)的發(fā)展和應(yīng)用,以智慧交通建設(shè)為載體,按照車(chē)路協(xié)同發(fā)展的技術(shù)路徑,積極推進(jìn)自動(dòng)駕駛的發(fā)展。
基于這種背景,2018年9月起,國(guó)內(nèi)出現(xiàn)了一個(gè)少有的現(xiàn)象——阿里、百度等好幾家大公司紛紛設(shè)立研究院或聯(lián)合實(shí)驗(yàn)室,在一個(gè)月內(nèi)幾乎全部開(kāi)啟了對(duì)車(chē)路協(xié)同技術(shù)的研究。

張毅教授講到,目前研究自動(dòng)駕駛有兩個(gè)技術(shù)路線,一個(gè)是基于自動(dòng)駕駛的車(chē)載高精度傳感器,另一個(gè)是基于車(chē)載高精度導(dǎo)航和高精度地圖。
這兩個(gè)路線略有差別,但本質(zhì)上都是依靠單車(chē)的感知和決策,出現(xiàn)了一些問(wèn)題。例如2016年一輛特斯拉在自動(dòng)駕駛狀態(tài)下撞上了一輛貨車(chē)。
如果有車(chē)路協(xié)同技術(shù),讓兩車(chē)做一個(gè)交互,卡車(chē)的位置、速度、加速度、行進(jìn)路線等信息一下就獲得了,就會(huì)為自動(dòng)駕駛技術(shù)提供更好的解決方案。
這就是上述劉小明副部長(zhǎng)提出的,基于車(chē)路協(xié)同的自動(dòng)駕駛技術(shù),也是自動(dòng)駕駛技術(shù)的第三條技術(shù)路線。

具體來(lái)說(shuō),車(chē)路協(xié)同將為自動(dòng)駕駛汽車(chē)帶來(lái)三大優(yōu)勢(shì),一是提升了環(huán)境感知的深度和維度;二是增強(qiáng)了系統(tǒng)反應(yīng)與控制的實(shí)時(shí)性;三是降低了對(duì)傳感器與地圖的依賴,進(jìn)而降低成本。
目前,張毅教授團(tuán)隊(duì)已經(jīng)在上海國(guó)際汽車(chē)城開(kāi)發(fā)出了初步的基于車(chē)路協(xié)同技術(shù)的自動(dòng)駕駛車(chē)輛。該車(chē)除了近距離的環(huán)境感知信息來(lái)自車(chē)輛本身,中遠(yuǎn)程的駕駛、決策、控制信息都來(lái)自車(chē)路協(xié)同信息交互。
車(chē)路協(xié)同助力自動(dòng)駕駛超越L5級(jí)
在演講最后,張毅教授探討了人工智能技術(shù)與自動(dòng)駕駛的關(guān)系。
他引用一些院士的論述表示,計(jì)算機(jī)模仿人去感知環(huán)境、模仿人去理性思考、模仿人去執(zhí)行動(dòng)作,是人工智能應(yīng)用的三大標(biāo)志。
根據(jù)院士們的界定,現(xiàn)在應(yīng)用人工智能技術(shù)有一些條件,即需要豐富的數(shù)據(jù)或知識(shí)、完備信息、確定性信息、靜態(tài)與結(jié)構(gòu)化環(huán)境、有限的領(lǐng)域或單一的任務(wù)。
而在駕駛領(lǐng)域,這五大條件都無(wú)法具備,開(kāi)車(chē)時(shí)很多情況是隨機(jī)的。
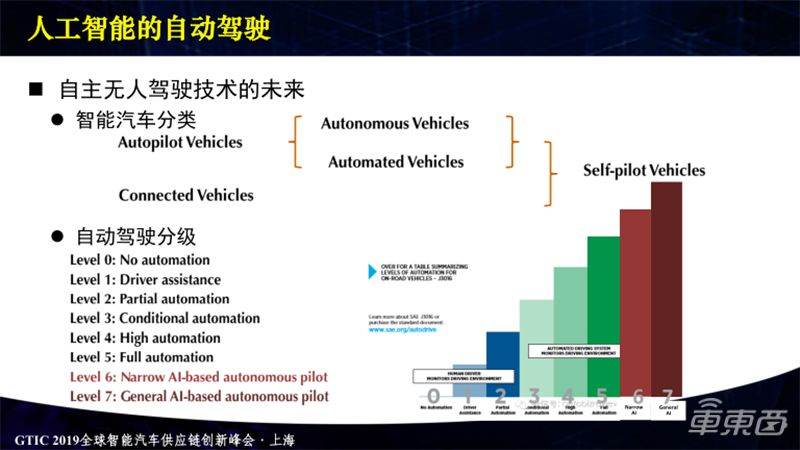
從這些標(biāo)準(zhǔn)來(lái)看,目前的自動(dòng)駕駛還處于自動(dòng)化的駕駛階段,自動(dòng)駕駛汽車(chē)還是基于規(guī)則行駛的機(jī)器人,對(duì)應(yīng)現(xiàn)在的L1—L5級(jí)自動(dòng)駕駛。
而隨著人工智能駕駛的發(fā)展,未來(lái)將先后出現(xiàn)具備弱人工智能和強(qiáng)人工智能技術(shù)的自動(dòng)駕駛汽車(chē),可以分別對(duì)應(yīng)L6與L7級(jí)的自動(dòng)駕駛,而在這一發(fā)展過(guò)程中,車(chē)路協(xié)同又是人工智能與自動(dòng)駕駛完美結(jié)合的技術(shù)基礎(chǔ)。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13787瀏覽量
166407
原文標(biāo)題:關(guān)注| 清華大學(xué)張毅:自動(dòng)駕駛離不開(kāi)車(chē)路協(xié)同,人工智能助力自動(dòng)駕駛超越L5級(jí)
文章出處:【微信號(hào):e700_org,微信公眾號(hào):汽車(chē)工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
智能車(chē)路協(xié)同試驗(yàn)車(chē)開(kāi)發(fā)服務(wù)

車(chē)路協(xié)同——探索智慧路燈系統(tǒng)的無(wú)限可能
智慧綜合桿路燈與物聯(lián)網(wǎng)融合與發(fā)展 車(chē)路協(xié)同——探索智慧路燈系統(tǒng)的無(wú)限可能

奕斯偉計(jì)算推動(dòng)智能網(wǎng)聯(lián)汽車(chē)加速發(fā)展
AI賦能TRIZ:跨界融合,共赴“不可能”挑戰(zhàn)之旅
C-V2X安全證書(shū):保障車(chē)路云系統(tǒng)通信安全的關(guān)鍵

黑芝麻智能正式加入智能網(wǎng)聯(lián)汽車(chē)“車(chē)路云一體化”應(yīng)用建設(shè)
車(chē)路云協(xié)同,這次它真的來(lái)了嗎?

助力車(chē)路協(xié)同,基于i.MX8MPlus核心板的路側(cè)單元主控方案

MES管理系統(tǒng)與其他系統(tǒng)的集成
訊維融合通信技術(shù)的跨界融合:開(kāi)啟全新溝通模式
訊維融合通信系統(tǒng):智能通信技術(shù)的跨界融合與創(chuàng)新
如何實(shí)現(xiàn)MES系統(tǒng)與其他系統(tǒng)的集成?
金溢科技業(yè)績(jī)大幅增長(zhǎng),車(chē)路協(xié)同業(yè)務(wù)優(yōu)化貢獻(xiàn)顯著





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論