 3D打印,20分鐘打造毫米級微型機器人!
3D打印,20分鐘打造毫米級微型機器人!
微型機器人在醫療中大有用途,如輸送藥物、采集組織樣本,協助手術等。近日,多倫多大學和MIT的兩個研究都采用磁性材料和3D打印,研發出可控制的、只有幾毫米大小的微型機器人。
能夠在體內運送藥物和幫助醫生進行手術的微型機器人一直是科學家們的夢想。
但科學家們目前研發出來的微型機器人原型都是剛性的,而且通常很慢,無法即時響應發給它們的無線指令。
現在,研究人員已經開發出幾毫米大小的微型機器人,它們可以折疊成無數種不同的形狀,這讓它們能夠執行抓取物品、爬行等操作 —— 使用磁鐵作為遙控器。
論文第一作者徐天啟展示他們研發的微型機器人
來自多倫多大學微型機器人實驗室的徐天啟 (Tianqi Xu)、Jiachen Zhang、Mohammad Salehizadeh, Onaizah Onaizah 和 Eric Diller 等人近日在 Science Robotics 雜志上發表了該研究的論文。

使用磁鐵控制的話,機器人也必須要使用磁性材料,因此以前的磁控微型機器人是硬質的。
為了打造一個靈活的磁控機器人,研究人員將磁性元素釹的粒子嵌入到更柔軟的材料中,比如塑料。
研究人員使用一對強力的磁鐵來翻轉機器人特定部位的釹的極性,使它們在磁場中發生排斥和吸引,從而實現折疊。然后,他們將紫外線照射在這些部位上,固化嵌入在里面的材料,并將它們鎖定在特定的位置。
研究人員給機器人編程,使其能夠通過控制不同部位的極性來進行 3D 運動,如抓取、爬行和游泳。
機器人能夠折疊:
爬行
游動
機器人能夠折疊抓、爬行、游動等
為了協助外科手術或在人體內運送藥物,未來的機器人將需要放棄有毒性的釹,轉而使用鐵等危險性較低的金屬。研究人員表示,使用鐵等金屬仍然可以讓機器人工作,但可能需要更強的磁鐵來操縱。除了醫療應用外,這些機器人還可以被用于小型工廠生產微型的產品。
3D 打印,僅需 20 分鐘打造,游戲手柄控制
過去,組裝一個微型機器人需要一對尖嘴鑷子、一臺顯微鏡,需要研究人員穩定的雙手,以及至少 8 個小時的操作時間。但多倫多大學的這個研究采用 3D 打印技術,僅需 20 分鐘即可打造出磁性毫米級微型機器人。
3D打印微型機器人所需的物理材料
多倫多大學微型機器人實驗室由 Eric Diller 教授領導,他們開發的磁性微型機器人只有針尖大小,可以穿過充滿液體的血管和人體內的器官。
Diller 和他的團隊利用磁場,無線控制這些機器人的運動。
實驗中使用一個游戲手柄來控制微型機器人的運動
每個微型機器人都由幾個扁平柔性材料的 “薄片” 組成,上面精確地排列著磁針。
組裝完畢之后,研究人員就利用磁場誘導機器人,讓機器人像蠕蟲一樣在流體通道中移動,或者將其微小的 “夾片” 合起來,從而能夠采集組織樣本。
機器人抓取了一個薄片(綠色)并運動
論文一作徐天啟表示:“微型機器人制造起來相當困難,而且需要高強度的工作,因為制造這種機器人需要十分精確。此外,由于需要手工裝配,讓機器人變小就更加困難了,這也是我們的研究的主要目的。”
徐天啟和他的同事們開發的這種自動化方法,大大減少了設計和制造時間,并擴大了可以制造的微型機器人的種類。
為了驗證他們的新技術的能力,研究人員設計了 20 多種不同的機器人形狀,然后將其編程到 3D 打印機。然后打印機構建并固化設計,磁性顆粒定向是這個過程的一部分。
這種新的優化方法為開發比目前的毫米規模更小、更復雜的微型機器人打開了大門。Diller 說:“我們相信,有朝一日可以將機器人的尺寸再縮小 10 倍。”
研究細節:設計、材料和方法
圖1:用于圖案化離散3D磁化的系統示意圖。(A)用于在UV可固化彈性體基質復合材料中圖案化永磁顆粒的物理設備。DOF:自由度。(B)實驗測量的最大交聯厚度相對于磁性顆粒濃度。誤差條表示SD。(C)具有水平和垂直磁化分量的雙層結構的示意圖。黃色箭頭表示在每個塊中的磁化方向。(D)雙層結構的頂視圖圖像。單位比例尺代表實際長度2毫米。(E)使用磁光傳感器分別在各層的近表面處測量的面外磁通分布。利用獨立制造的兩層拍攝磁光圖像以更好地可視化磁化分布。
圖2:具有分布式3D磁化分布的柔性磁平面結構。黃色箭頭表示局部磁化的方向,綠色箭頭表示致動磁場的方向。材料厚約80微米。“手風琴”的驅動磁場為200 mT,其他所有磁場均小于20 mT。所有組件都可以在原始形狀和折疊形狀之間進行快速可逆轉換。
圖3 用于預測形變的模型和在3D環境下調整制造角度組件。(A)側視圖像顯示出在20mT磁場下的大角度偏轉。(B)大角度偏轉的數值模型。(C)側視圖顯示20mT磁場下環的波動彎曲。(D)使用有限元法進行模擬。(E)三臂結構的幾何形狀,尺寸和磁化分布。單位:mm。(F)具有不同磁化分布的三臂結構的俯視圖。比例尺:2mm。
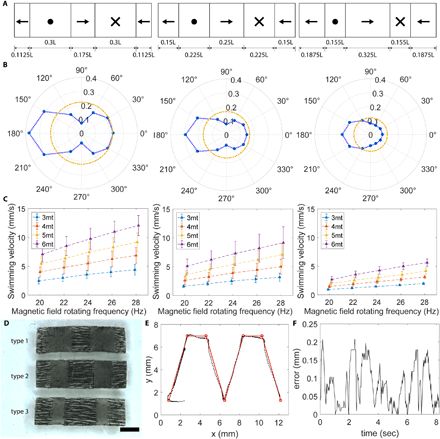
圖4:毫米級分段磁性swimmer。(A)三種類型swimmer的磁化曲線。長L為4.5毫米。(B)模擬swimmer的TWC分析。藍色標記表示每個階段的形變,黃色虛線表示一個周期中的等效形變圓。(C)swimmer在不同條件下的實驗游泳速度。實心三角形代表六個樣本的平均值,誤差條代表SD。(D)在一個過程中由相同前體制造的分段swimmer。比例尺:1mm。(E)磁性swimmer的追蹤路徑。(F)磁性swimmer的路徑跟隨誤差。
圖5:非束縛性多臂磁性微夾鉗。(A)磁性微夾鉗的幾何形狀,磁化曲線和工作結構。黑色箭頭表示每個組件的局部磁化方向,藍色箭頭表示驅動磁場。(B)貨物運輸任務示意圖。(C)在硅油中貨物運輸任務的俯視圖和側視圖。硅油用于提升體重并減緩夾具的形變,使開環控制更容易。比例尺,5mm。(D)不同場強下不同微夾鉗的特寫圖像。比例尺:2mm。
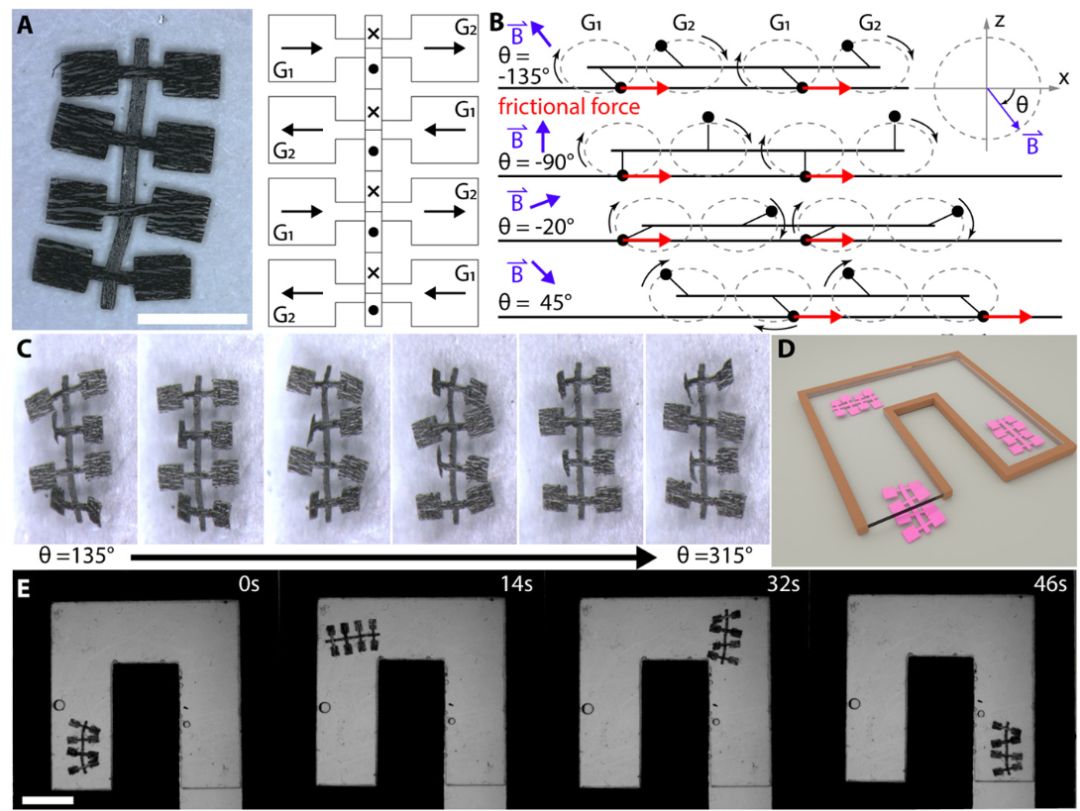
圖6 多足槳式爬行機器人。(A)槳式爬行機器人的圖像和磁化曲線。局部磁化用黑色箭頭表示。當標記為G1的腿執行動力沖程時,標記為G2的腿執行恢復沖程,反之亦然。比例尺,2毫米。(B)側面步態的示意圖。(C)不同階段的機器人的俯視圖。(D)微通道示意圖。通道的橫截面為4.7毫米×1.0毫米。(E)俯視圖,顯示機器人在填充有硅油的微通道中的運動。硅油用于提升體重并減慢機器人的行程運動,使攝像機能夠清晰地捕捉到運動。水中的沖程運動和機器人的速度相對更快。比例尺:4mm。
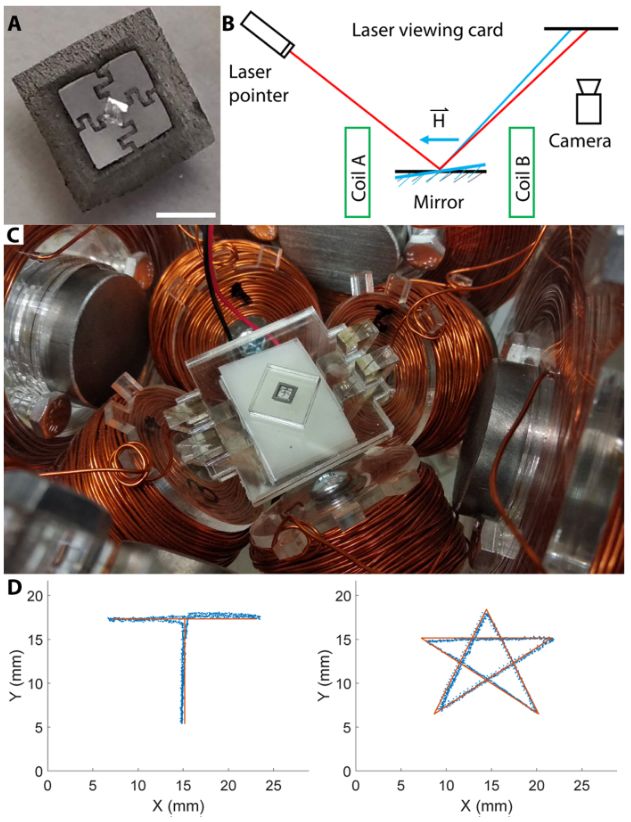
圖7 用于激光轉向的非受限型磁鏡安裝座。(A)鏡架圖,中間裝有一個小鏡子。該結構的磁化分布如圖2L所示。比例尺:2mm。(B)激光轉向實驗示意圖。(C)實驗中使用的線圈系統。(D)激光的目標軌跡(橙色)和實驗軌跡(藍色)。T形和星形軌跡的跟蹤頻率分別為0.5Hz和0.2Hz。
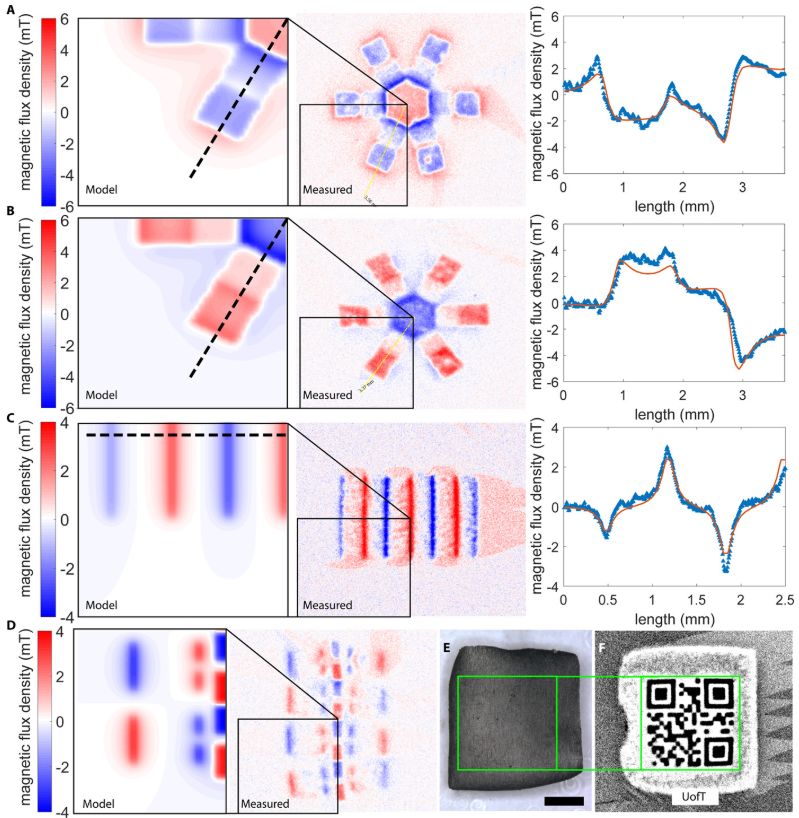
圖8 不同樣品近表面的磁通量分布。以及沿(A)六臂磁性微夾鉗(前),(B)六臂磁微夾鉗(后),(C)折疊結構(D)多足槳式爬行機器人。數據收集自距樣品表面60μm處,使用最小二乘擬合將模型中的磁化強度擬合到測量數據中。(E)帶有磁二維碼“UofT”的聚合物薄片。比例尺:2mm。(F)為相對于(E)的二維碼樣品的表面處測得的磁通量。
MIT磁控微型機器人,可用于運送藥物
未來的醫學應用需要更小、更復雜的微型機器人,例如進行靶向藥物運送、輔助受精或活體組織檢查。
比如,如果醫療應用需要在泌尿道或大腦的液腔中采集組織樣本,手術機器人必定要求尺寸更小。
采用磁性來控制,是微型機器人研究一個有前景的趨勢。這方面另一個引人矚目的研究來自MIT的工程師,他們設計了一種微型機器人,可以通過病人的血液中向病灶區域輸送納米級的藥物顆粒,使藥物能夠進入腫瘤或其他病灶區域。
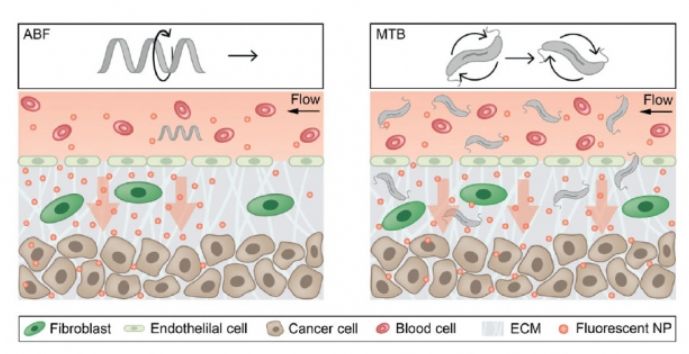
研究人員受到細菌的推進和運動方式的啟發,打造出的磁性微型機器人有助于克服納米粒子輸藥的最大障礙之一:如何讓粒子離開血管并集聚在正確的位置。
這個微型送藥機器人只有0.35毫米大小,可以通過外部磁場來控制。這種受生物學啟發的機器人被研究人員稱為“人造細菌鞭毛”,由一種微小的螺旋結構組成,類似于細菌推進自身運動的鞭毛。這些機器人使用高分辨率3D打印機進行打印,然后涂上鎳,使其具有磁性。
為了測試單個機器人控制附近納米粒子的能力,研究人員打造了一種模擬腫瘤周圍血管的微流系統,系統中的通道寬度在50到200微米之間,通道內側涂有凝膠,上面開了孔,以模擬腫瘤附近的破裂血管。
研究人員向機器人施加外部磁場,使其旋轉并在通道中游動。研究人員表示,這種機器人可用于供藥,以減輕支架周邊部位的炎癥。
-
編程
+關注
關注
88文章
3614瀏覽量
93686 -
微型機器人
+關注
關注
0文章
111瀏覽量
19557 -
3D打印
+關注
關注
26文章
3547瀏覽量
109027
原文標題:中國一作研究再登Science子刊:磁驅動折疊機器人,3D打印僅需20分鐘
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論