 現今手術機器人能否取代醫生完成手術?
現今手術機器人能否取代醫生完成手術?
提到手術機器人,相信大家都在腦海里都會形成一個場景,是一個自動的機器人能夠完全取代醫生來做一些手術的操作,這是我們未來追求的目標,現實情況是我們目前在做的機器人有各種各樣,還遠沒有達到那樣的一個場景,但我們依然在朝著那個方向去努力。
據不完全統計,全世界大概有至少一百種以上的手術機器人,用在各個學科、各種形態,比如說有機械臂式的、多個機械臂式的、蛇形的各種各樣的機器人。所以實際上對于手術機器人這個領域來說,目前是一個百花齊放的這樣的時代。
遵循醫生操作的主從型手術機器人
對于手術機器人,總的來說可以分成兩大類。第一大類從 2000 年開始,在美國就已經有很多商業化的產品。最主流的、目前在全世界應用最廣泛的,叫做主從型手術機器人。
圖 | 主從型手術機器人
什么叫主從型手術機器人呢?它其實是遵循醫生的遙操作來進行手術的一類機器人。醫生手腳并用在控制臺完成操作,機器人會擺在手術床旁,由機器人的三四個甚至最多有五個機械臂,來完成對醫生的整個手術的跟蹤。那么當醫生進行所有的操作的時候,機器人在病人的體內完成相應的操作,所以我們把它稱之為主從型的手術機器人。
這一類的機器人目前在腹腔手術、胸腔手術中得到了大量應用。但是我們今天所討論的神經外科這個領域,這類機器人應用場景是比較小的,其中的原因就在于這種跟蹤醫生手術操作的機器人必須在一個有很好的手術空間的范圍內,所以比如說在腹腔的腔道中,或者是在胸腔的腔體中,機器人可以有自由的空間去活動。
但是在神經外科這個領域,也就是我們說的腦手術這個領域,因為腦組織是一個實體,所以這種類型的機器人實際上是沒有辦法進行一個很好的操作的,那么就引出來了我們今天要討論的第二大類的手術機器人,是叫做定位型的手術機器人。
圖 | 導航型定位手術機器人
手術機器人幫助醫生定位,解決神經外科手術大難題!
定位型手術機器人是怎么樣解決神經外科中的問題的呢?我們先看一下神經外科的手術的需求。
在神經外科中,有一大類叫微創的立體定向手術,是希望能夠把臨床以前開顱進行的一些手術微創化。那么當微創的時候,對醫生最大的挑戰是什么呢?實際上也非常的明確,對于臨床來講,醫生在看不到的情況下必須進行打孔、插入引導裝置,最后插入它相應的電極、活檢針或者是引流裝置等等這類的問題。
在這樣的一類需求下,對于醫生來講,我從哪個方向、從哪個位置來插進去是最需要的。那這樣的一個手術術式對于臨床來講,就需要有一個自動的工具,或者是手動的工具來幫助醫生完成定位,這就是神經外科叫立體定向手術的一大類的需求。
這個需求非常的廣泛,它可以用在癲癇、帕金森、腦腫瘤、腦出血等等領域。比如癲癇手術,它甚至不只要插一根,還有可能要插多根電極到人的腦組織里面去。那怎樣有一個更好用的工具來幫助醫生,就是一個很重要的問題。
以癲癇為例,在中國癲癇大概有一千萬的患者,其中 30% 也就是約 300 萬的患者是藥物難以控制的,這些患者里面很多是兒童,那么這些患者里面又有接近一半的患者是適合手術治療的。可是實際的手術治療每年只有一萬例,那么這 1 萬對 150 萬的這樣大的比例差是怎么造成的呢?
其中很重要的一個原因就在于我們并沒有一個很合適的、很方便的手段來幫助臨床進行這種微創的手術,那么現在是采用什么樣的方式呢?因為剛才也講了,對于這一類的手術里面最重要的是有一個幫助醫生進行定位的工具。
給骨頭釘顱釘?傳統定位方式給病人帶來巨大痛苦!
我們現在做的這件事情,實際上通過傳統的方式也是可以實現的,但是實現的難度會遠比機器人要高,現在是怎么實現的呢?
首先,病人在手術的當天早上,必須要在他的頭上卡一個立體定向頭架,這個頭架是一個純被動的機械裝置,是需要在病人清醒的狀態下直接釘到顱骨上,保證跟病人的頭完全不動。在人的清醒的狀態下,在前額和后腦勺釘四顆顱釘,直接釘到骨頭上是一種怎樣的痛苦?
雖然我們可以在局部打一些麻藥,但是當你擰顱骨釘的時候對整個頭皮的牽連也會造成巨大的痛苦。在實際手術時,病人躺到手術床前帶著這樣的一個框架,在上面上一個坐標弓,然后通過這樣的一個坐標弓純機械的方式,幫助醫生完成定位,這就是整個的手術的方式。
從我剛才對手術方式的描述來看,這樣的一個定位的框架對患者來說有很大的問題,第一個問題是患者需要在清醒的狀態下帶這個架子,對于病人特別是兒童患者非常地痛苦。
我以前跟過很多這樣的臨床手術,在手術的時候給兒童釘頭架對于兒童來說非常痛苦,特別是在我有了小孩之后,這種場景我完全是無法去看的。所以從這樣的角度來講,這種清醒時佩戴頭架,對于兒童會有巨大的創傷。
同時它有很多其他的問題,比如說消耗的時間長,需要幾個醫生反復地去對刻度尺,同時存在一些植入的死角,對于一些臨床的術式是不適合的。那我們用什么樣的方式可以去解決傳統手術上的一些局限性呢?
我們希望下一代的產品應該痛苦小,沒有死角,應該是個自動化的裝置。由此我們研發了,我們新一代的神經外科的定位裝置,也就是我們剛才提到的手術機器人。
手術機器人的”眼”、”手”、”腦”是如何協作的?
機器人由三個部分組成。第一部分,當然它要有一個手,也就是機械臂。第二部分,它要有一個眼睛,眼睛幫助機器人來定位病人的位置。第三部分,也是最核心的,它要有一個大腦,大腦幫助機器人自動地判斷,它應該去什么樣的位置,不應該撞到什么樣的東西。這是組成整個機器人的三個部分。
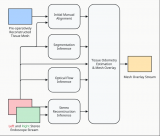
那么從這三個組成部分,就可以總結出我們機器人在實際手術中的流程。第一步,要通過計算機的大腦來實現手術路徑的規劃,也就是醫生要基于術前的磁共振的影像、CT 的影像把它配準融合到一起,在術前就可以知道病人的腦子里面是什么樣的一個情況,要基于什么樣的一個通道,完成對病人的相應路徑的穿刺定位。
第二步,當醫生在術前的計劃中把這個位置設計好之后,把機器人推到了病人的手術床前,機器人通過自己的眼睛,也就是我們現在采用的無接觸式的激光定位,來完成對病人頭部的定位。
當知道了病人的頭實際在什么位置,第三步對機器人來說就很簡單了,它可以自動地執行醫生術前在磁共振或者是 CT 的影像上面規劃的路徑完成定位,醫生在這個定位的位置上進行后期的手術操作。這就是整個機器人實際的操作流程。
那么我們逐步地來分析,機器人具體是怎么樣操作的。從第一個手術計劃的層面上,醫生最關注的問題是規劃一個怎樣的路徑,或者是多根路徑,能夠準確地達到我想要的位置。與此同時,最重要的是要避開顱內的重要血管,避免顱內出血。
機器人在這里做什么工作呢?它能夠通過術前的磁共振或者 CT 的二維斷層的片子實時地做出三維的重建,讓醫生直觀地看到在病人的腦組織里面腦溝回長的是什么樣子的,血管是長的什么樣子的,可以直觀地在三維的影像上面對路徑進行規劃,這樣就可以看應該怎樣避開顱內的血管。
所以這張圖就可以看出,我們能夠通過磁共振的影像,重建出三維模型的病人腦組織和血管,跟真實的實際病人開顱的照片做了一個對比,它的真實性非常的好,這一點對臨床來說非常重要,因為臨床要基于醫生術前重建的影像進行路徑規劃,這個影像重建的真實與否,對于最終如何規避血管、避免顱內出血有重要的意義。
從這個角度來講,我們的計劃軟件可以做到:第一,不受國外昂貴的軟件采購的限制;第二,我們能夠真正地把原來手術的出血的概率降低一半以上;第三,我們可以通過這樣的一個規劃軟件,大幅度縮短醫生傳統規劃的手術時間。我們的軟件已經在全國大量的醫院被使用,目前在全國已經有超過 5000 臺的手術進行日常的使用。
當醫生完成了術前的規劃之后,第二步就是當機器人推到手術的床前時,手術機器人需要知道病人的頭到底在什么位置,它才能準確地到達位置。那么它是怎么樣知道的呢?
大家如果玩過 Kinect 游戲的話,實際上可以理解為是在機器人的前端裝了一個超高精度的 Kinect,我們通過這樣一個有深度信息的攝像頭,或者是定位裝置能夠直接捕捉病人頭的位置,拿到病人頭的實際的位置和術前的影像上的位置這樣的一個關系。
第三步機器人會自動地執行到預定的手術位置,醫生就在機器人引導的這個位置上進行穿刺、打孔和植入的操作。圖中也可以看出通過我們的機器人能夠達到一個非常精準的定位精度,這對于臨床是非常有效的。
那么從術后的這兩幅影像上也可以看出來,彩色的部分是術前規劃的路徑,白色的是術后通過CT 重建出來的實際的植入位置,可以看出術后的植入位置跟術前的彩色的路徑是高度的一致的,這個對于臨床來說就解決了高精度的問題。
同時由于機器人有很好的定位方法,就完全不需要在病人術前再釘定向頭架了,所以病人在術前是完全沒有痛苦的。而且機器人由于它六個自由度的特點,它可以完全無死角地到達病人頭附近的任何位置,同時能夠保持很高的效率。
所以當機器人能夠得到大量的臨床應用的時候,它就可以使整個的手術時間下降 60% 以上。那么未來在全國能夠開展癲癇外科的醫院數量就會大大的提高,因為手術整個的復雜度得到了大大的降低,同時能夠匯集的患者數量也會成倍的增加,這是我們機器人目前在臨床上一個非常重要的意義。
神經外科已經走向了機器人微創的時代,它對于臨床的意義非常的重要,神經外科的發展方興未艾,未來在癲癇、帕金森、甚至老年癡呆等等領域還有廣闊的空間需要去努力,其中定位的工具和微創的治療方式也需要不斷地革新和創新,這是我們一直以來努力的目標。
從我們大量接觸臨床病人、接觸神經外科的十幾年時間來看,我們整個團隊堅定地希望,在這個領域能夠降低醫生的操作門檻、減少病人的手術痛苦,希望能夠開發出未來智能、高效、精準的手術機器人,這將會極大地降低患者的痛苦、提高手術的成功率、降低手術的風險。
-
機器人
+關注
關注
211文章
28501瀏覽量
207484 -
手術機器人
+關注
關注
2文章
131瀏覽量
15926
原文標題:手術機器人真的可以取代醫生了嗎?
文章出處:【微信號:deeptechchina,微信公眾號:deeptechchina】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
《具身智能機器人系統》第7-9章閱讀心得之具身智能機器人與大模型
百洋醫藥攜手ZAP,獨家商業化頭頸部放療手術機器人
借助NVIDIA Holoscan實現實時手術指導
基于模型的顯微手術機器人設計

滑環在手術無影燈的應用
醫療機器人有什么用
醫療機器人的優缺點_醫療機器人涉及哪些技術
NVIDIA邊緣計算助力uAI-MERITS革新機器人手術
微型導軌:手術機器人的高精度“骨骼”







 工商網監
工商網監
評論