") “位置/ 角度測量”是視覺檢測的重要應(yīng)用之一
“位置/ 角度測量”是視覺檢測的重要應(yīng)用之一
位置測量/搜索模式
“位置/ 角度測量”是視覺檢測的重要應(yīng)用之一。
對于玻璃面板,要求得到高精度的位置信息。而對于IC 檢查,則要求具有適用于高速生產(chǎn)線的處理能力。除此之外,在對于前兩講中曾經(jīng)介紹過的“瑕疵”、“邊緣”等進(jìn)行檢查之前,需要對齊工件的位置。因此,“位置補(bǔ)正功能”也是必不可少的。
本講將以最常用的“圖形搜索”模式為中心,介紹其原理及應(yīng)用方法。
圖形搜索模式的算法什么是圖形搜索?
圖形搜索是指從圖像內(nèi)找出與標(biāo)準(zhǔn)圖像相似的一個(gè)或多個(gè)部位,并輸出其位置、角度及相關(guān)度(一致度)結(jié)果。
下面介紹本公司的CV系列當(dāng)中的圖形搜索模式的算法。
第一步壓縮標(biāo)準(zhǔn)圖像及搜索圖像,減少數(shù)據(jù)量。
圖案匹配(正規(guī)化相關(guān))需要進(jìn)行大量的計(jì)算處理。如果要處理所有的圖像輸入信息,則需要相當(dāng)長的處理時(shí)間。通過限制需要處理的像素?cái)?shù)量,可以減少數(shù)據(jù)量,縮短處理時(shí)間。這種操作被稱為“拉開間隔”“壓縮”。
第二步第一次搜索。

以一定的間隔在搜索區(qū)域內(nèi)移動(dòng),找出相關(guān)值最高的部位。該間隔被稱為“步幅”或“間距”,或者單 獨(dú)稱為“跳躍”。如果設(shè)置了旋轉(zhuǎn)修正,則按照指定的角度進(jìn)行旋轉(zhuǎn)搜索。
第三步第二次搜索

圖以第一次搜索后找到的部位為中心,在相對更小的范圍內(nèi),使用減少壓縮量的圖案再次進(jìn)行搜索,找出相關(guān)值最大的部位。
※也可以一邊減少壓縮量,一邊重復(fù)本步操作。
第四步最終檢查

以第三步中找到的部位為中心,使用未經(jīng)壓縮的圖案進(jìn)行搜索,然后進(jìn)行亞像素處理。
搜索模式的典型應(yīng)用例玻璃基板的定位
在粘貼玻璃基板之前,檢測基板對角上 的標(biāo)記位置并對齊位置。
瓶子標(biāo)簽錯(cuò)位檢查
檢查瓶子標(biāo)簽的位置。即使在高速生產(chǎn)線上也可以實(shí)現(xiàn)全數(shù)檢查,因此能夠防止不合格品的流出。
IC方向判斷
搜索索引上的IC刻印字符,檢測角度,判斷方向。要求具有適用于高速生產(chǎn)線的處理能力。
減少搜索錯(cuò)誤的要點(diǎn)
產(chǎn)生搜索錯(cuò)誤的原因
如上所述,在進(jìn)行第一次搜索時(shí),為了提高處理速度,使用壓縮后的圖案進(jìn)行搜索以找到大致的位置。
產(chǎn)生搜索錯(cuò)誤的主要原因是,在第一次搜索過程中,將非目標(biāo)圖案(下圖候選圖案2)當(dāng)作是候選圖案檢測出來。
減少搜索錯(cuò)誤的要點(diǎn)(改變壓縮率)
基恩士公司生產(chǎn)的 CV 系列中,針對各種使用目的,提供了各種參數(shù)的組合設(shè)置。這樣,用戶即使沒有相關(guān)的專業(yè)知識(shí),也可以容易地進(jìn)行設(shè)置操作。在這里,壓縮率相當(dāng)于設(shè)置項(xiàng)目“搜索敏感度”,分為“低”~“高”共七個(gè)級(jí)別。
以上一頁中的例子為例,改變搜索敏感度(壓縮率)后,將變成右圖所示的樣子。由于使用了更接近標(biāo)準(zhǔn)圖案的圖案進(jìn)行搜索,因此可以防止檢測出類似物。
確保搜索穩(wěn)定的要點(diǎn)(提升結(jié)果精度)
利用“避免搜索錯(cuò)誤的要點(diǎn)”,可以防范絕大多數(shù)的搜索錯(cuò)誤。搜索對精度也有要求(必須抑制數(shù)值的偏差)。根據(jù)上一頁的算法來看,就是在最終程序中,可以實(shí)現(xiàn)的最細(xì)觀察效果。下面就最終結(jié)果的精度提升方法進(jìn)行說明。
有效提高結(jié)果精度的方法
增加最終檢測(詳細(xì)搜索)的次數(shù)。
利用連續(xù)拍攝功能。
使用預(yù)處理文件(參考“圖像講座”第六講第4頁)。
(1)增加最終程序(詳細(xì)搜索)的重復(fù)次數(shù)
在“引發(fā)搜索錯(cuò)誤的原因”中,我們已就改變第1搜索中壓縮率的“搜索敏感度”進(jìn)行了說明,還備有名為“搜索精確度”的參數(shù)。這是決定搜索步數(shù)的參數(shù),可設(shè)定“粗”至“細(xì)”的5個(gè)等級(jí)。
需要獲得精度更高的測量結(jié)果時(shí),可以調(diào)細(xì)“搜索精確度”,增加第2搜索至最終搜索的重復(fù)次數(shù)。這樣就可以進(jìn)一步提升最終結(jié)果的精度。
(2)使用連拍功能
連拍功能,是指以單次觸發(fā)輸入重復(fù)進(jìn)行復(fù)數(shù)次拍攝及視覺系統(tǒng),將其平均值、最大值、最小值作為檢測值的功能。相較于單次拍攝,可抑制檢測值的偏差。
新一代的搜索功能——“幾何形狀搜索”
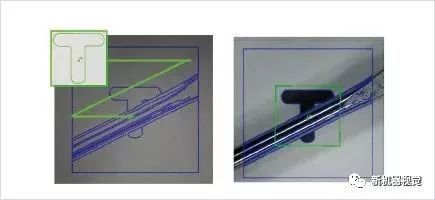
除了利用正規(guī)化相關(guān)法的圖形搜索之外,還有一種基于檢測對象輪廓的“ 幾何形狀搜索”。杰基恩士公司生產(chǎn)的CV 系列“ShapeTrax”就具有這樣的功能。“ShapeTrax”根據(jù)輪廓數(shù)據(jù)進(jìn)行搜索,因此在搜索對象有缺損時(shí),也可以根據(jù)殘留的形狀數(shù)據(jù)進(jìn)行正確的搜索。除此之外,還可以根據(jù)對象的尺寸的變化、黑白反轉(zhuǎn)等表面狀態(tài)的變化做出正確的處理,從而可以確保檢查效果。
粘貼玻璃基板時(shí)的定位
重疊在框架上。即使標(biāo)記發(fā)生變化,也可以確保檢測的穩(wěn)定性。
用以前的搜索方法難以檢查的例子
[圖案受損(重疊)]
[尺寸/焦點(diǎn)變化]
[黑白反轉(zhuǎn)(底片)]
使用“ShapeTrax”解決問題
[圖案受損(重疊)]
[尺寸/焦點(diǎn)變化]
[黑白反轉(zhuǎn)(底片)]
使用“ShapeTrax”進(jìn)行檢測
使用提取出來的邊 緣形狀進(jìn)行搜索

在輸入圖像的邊緣中搜索相
似的邊緣形狀
位置測量/搜索模式 總結(jié)
提高圖像傳感器搜索穩(wěn)定性的要點(diǎn)如下:
在理解搜索原理的基礎(chǔ)上,選擇最適宜的模式及設(shè)置。
未能夠找出正確的搜索目標(biāo)時(shí),嘗試改變“搜索敏感度”。
改變“搜索精度”以提高最終檢測的精確度。
根據(jù)工件狀態(tài)·形狀等選擇基于輪廓數(shù)據(jù)的幾何形狀搜索。
下一個(gè)主題是理解位置補(bǔ)正,正確檢測移動(dòng)物體的方法。
在生產(chǎn)線上運(yùn)行的工件檢測,必須具備位置補(bǔ)正功能。
理解位置補(bǔ)正的要點(diǎn),包括補(bǔ)正源檢測、補(bǔ)正對象檢測、坐標(biāo)軸、旋轉(zhuǎn)角度。
-
IC
+關(guān)注
關(guān)注
36文章
5945瀏覽量
175501 -
圖像
+關(guān)注
關(guān)注
2文章
1083瀏覽量
40449 -
位置檢測
+關(guān)注
關(guān)注
0文章
22瀏覽量
7910
原文標(biāo)題:機(jī)器視覺系列—位置檢測基礎(chǔ)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
基于機(jī)器視覺的噴霧角度檢測
磁阻角度和線性位置測量
機(jī)器視覺系統(tǒng)測量有哪些優(yōu)勢?
中山視覺尺寸檢測方法和檢測范圍
深圳CCD視覺檢測技術(shù)在測量時(shí)有哪些優(yōu)點(diǎn)?
labview視覺檢測自動(dòng)調(diào)整產(chǎn)品位置
深圳機(jī)器視覺檢測有什么情況要用遠(yuǎn)心鏡頭?
深圳市四元數(shù)數(shù)控技術(shù)有限公司機(jī)器視覺應(yīng)用之標(biāo)定板的使用?
貼片機(jī)視覺檢測中角度計(jì)算的一種高效算法
磁阻角度和線性位置測量
CN0368 磁阻角度和線性位置測量






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論