") 腦洞大開(kāi)!除了自動(dòng)駕駛,毫米波雷達(dá)還能這么用!
腦洞大開(kāi)!除了自動(dòng)駕駛,毫米波雷達(dá)還能這么用!
從目前的熱點(diǎn)來(lái)看,提起毫米波雷達(dá),自然會(huì)想到自動(dòng)駕駛。但是,如果把毫米波雷達(dá)技術(shù)的價(jià)值局限在尚未大規(guī)模應(yīng)用的自動(dòng)駕駛中,那就太過(guò)狹隘了。雖然增長(zhǎng)迅猛,但事實(shí)上,即便是自動(dòng)泊車(chē)(APS)這類(lèi)應(yīng)用,由于成本因素,毫米波雷達(dá)傳感器也只是剛剛啟動(dòng)它的商業(yè)機(jī)會(huì)。這種情況在諸如自適應(yīng)巡航控制(ACC)、前向防撞報(bào)警(FCW)、輔助變道(LCA)、盲區(qū)監(jiān)測(cè)(BSD)等ADAS應(yīng)用中也類(lèi)似。
在自動(dòng)駕駛之外,毫米波雷達(dá)技術(shù)有著廣泛的應(yīng)用,這是其在“傳感”叢林中的比較優(yōu)勢(shì)所決定的。就以自動(dòng)駕駛的應(yīng)用場(chǎng)景為例,目前采用的傳感器包括激光雷達(dá)、攝像頭、毫米波雷達(dá)、超聲波雷達(dá)、GNSS/IMU等,這些傳感器在包括汽車(chē)在內(nèi)的各種應(yīng)用場(chǎng)景中也很有代表性,而在什么場(chǎng)景使用它們?nèi)Q于這些傳感器不同的特性。
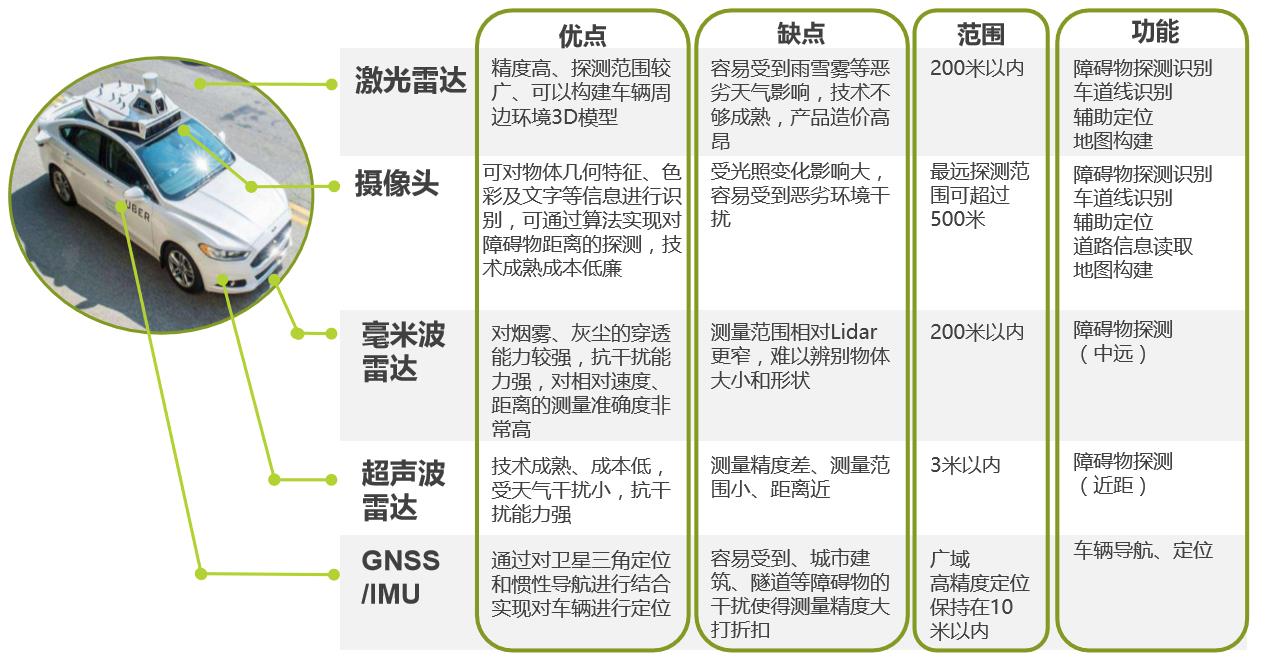
圖:各種傳感器特性比較
上圖解釋了為什么攝像傳感會(huì)被廣泛應(yīng)用到多數(shù)場(chǎng)景中,而毫米波雷達(dá)也有著廣泛適用的前景,而一些特性使得毫米波雷達(dá)具有替代或互補(bǔ)攝像傳感的可能。比如該技術(shù)可以在極具挑戰(zhàn)(如明亮的光線(xiàn)和黑暗中)的環(huán)境條件下檢測(cè)到人的位置,而同樣的條件下,攝像機(jī)會(huì)有過(guò)曝和欠曝的問(wèn)題;在需要檢測(cè)動(dòng)作的應(yīng)用中,超聲波傳感器無(wú)法區(qū)分人和靜物,而毫米波雷達(dá)則沒(méi)有這個(gè)問(wèn)題。此外,與其他傳感技術(shù)相比,毫米波具有非接觸性和非干涉性,可以穿過(guò)塑料、干墻和衣服等材料,這使得毫米波傳感器可以隱藏在面板背后,放置在室內(nèi)裝飾或車(chē)內(nèi)的其他材料內(nèi)——想象一下,對(duì)于需要隱蔽的監(jiān)控或感測(cè)系統(tǒng)的應(yīng)用場(chǎng)景而言,還有比這更合適的嗎?
事實(shí)上,基于自身的特性,除了汽車(chē)自動(dòng)駕駛,毫米波雷達(dá)可以廣泛的應(yīng)用于工廠產(chǎn)線(xiàn)、安防監(jiān)控、醫(yī)療設(shè)備、箱內(nèi)液位感測(cè)、機(jī)器人視覺(jué)和無(wú)人機(jī)等場(chǎng)景,而在MMIC(單片微波集成電路)解決了雷達(dá)模塊的體積和成本的瓶頸后,其應(yīng)用場(chǎng)景更加多元。日前,<電子發(fā)燒友>應(yīng)邀在TI的一場(chǎng)有關(guān)其毫米波雷達(dá)產(chǎn)品的巡演活動(dòng)中,參觀了這些產(chǎn)品在工業(yè)(IAW系列)和汽車(chē)(AWR系列)兩大領(lǐng)域中的應(yīng)用演示,一些應(yīng)用場(chǎng)景刷新了筆者的認(rèn)知,令人腦洞大開(kāi)。
場(chǎng)景一:智能交通
在智能交通系統(tǒng)中,傳感器用以追蹤交通擁堵并保持交通暢通,特別是在十字路口和高速公路上。這些傳感器必須具備精確性(用于測(cè)量車(chē)輛或行人的延伸范圍,速度和位置)、穩(wěn)固性(包括在不透氣的天氣,黑暗和陽(yáng)光下工作)、整體性(優(yōu)化實(shí)時(shí)評(píng)估和修正。)和易于使用性(帶有參考代碼和樣本以加速部署)這幾個(gè)特性。
以監(jiān)測(cè)高速公路上車(chē)速以遠(yuǎn)程發(fā)放超速罰單的應(yīng)用為例,傳感器必須能夠準(zhǔn)確地檢測(cè)處于不同距離的各個(gè)物體的速度,這需要通過(guò)設(shè)計(jì)中增加的Vmax算法而得以實(shí)現(xiàn)。這一功能還可以提高傳感器監(jiān)測(cè)交叉口的準(zhǔn)確性,使其能夠更好地預(yù)測(cè)接近車(chē)輛的數(shù)量,并啟用綠燈控制,減少車(chē)輛的啟動(dòng)和停止從而使交通更加流暢,并使得給闖紅燈車(chē)輛發(fā)送罰單變得更容易。而這個(gè)場(chǎng)景,毫米波雷達(dá)非常適用。
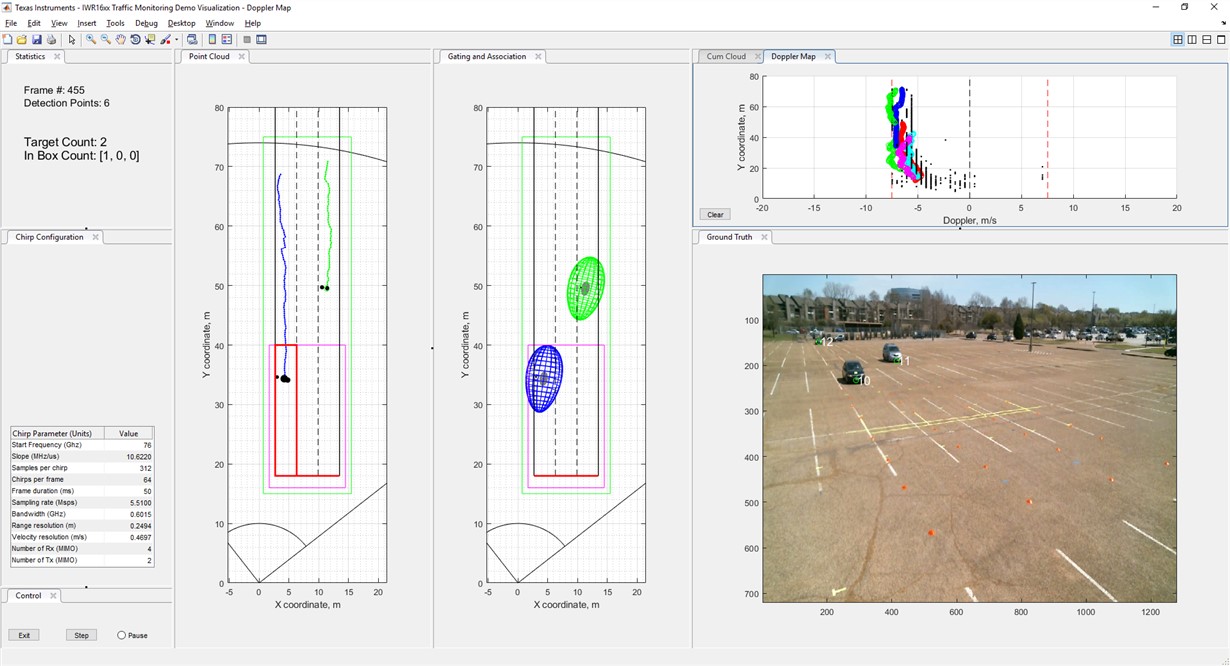
圖:這個(gè)用例采用的是TI的IWR1642,集成了能夠檢測(cè)物體的DSP——C674x,其ARM R4F處理器則可以隨時(shí)追蹤車(chē)輛的行駛距離和速度。該傳感器具有35厘米的分辨率,能夠檢測(cè)到距離不超過(guò)200米的各種物體,其50厘米/秒速度的分辨率,可以在高速公路單車(chē)道上精確地追蹤200公里/時(shí)及更高限速的車(chē)輛,以及限速70公里/時(shí),在有交叉路口綠燈控制和執(zhí)法的多車(chē)道上的車(chē)輛。
IWR1642具有120度視野(FOV)15度角分辨率,能夠更容易的檢測(cè)到接近交叉路口的車(chē)輛或行人。該傳感器還可以留意多個(gè)停車(chē)位,以便司機(jī)知道停車(chē)場(chǎng)某車(chē)道內(nèi)是否有車(chē)位,或者他們需要換一層樓找尋。這使得它也適用于ADAS。
場(chǎng)景二:工業(yè)應(yīng)用
在工業(yè)應(yīng)用場(chǎng)景中(按TI的分類(lèi),汽車(chē)之外的應(yīng)用都屬于工業(yè)應(yīng)用),TI演示了其60 GHz毫米波傳感器IWR6843的應(yīng)用。
圖:通過(guò)和視頻傳感的融合,可以感測(cè)和避免障礙物,或通過(guò)收集不同范圍、速度與角度的數(shù)據(jù)來(lái)檢測(cè)和識(shí)別手勢(shì),實(shí)現(xiàn)人機(jī)互動(dòng)。這一應(yīng)用非常適合工廠和產(chǎn)線(xiàn)的復(fù)雜環(huán)境。
據(jù)TI工業(yè)雷達(dá)產(chǎn)品營(yíng)銷(xiāo)總監(jiān)Robert Ferguson介紹,工業(yè)場(chǎng)景有很多領(lǐng)域會(huì)用到毫米波和攝像傳感的融合感測(cè)。比如焊接機(jī)器人,焊接時(shí)的強(qiáng)光對(duì)攝像頭有非常大的影響。而毫米波不受強(qiáng)光的影響。再比如機(jī)械臂、自動(dòng)搬運(yùn)工具的工作場(chǎng)景中,人、物混雜,需要設(shè)定安全工作區(qū)域,如果有人誤入,就會(huì)報(bào)警或者采取措施,這些都可以部署毫米波雷達(dá)進(jìn)行監(jiān)測(cè)。
圖:IWR6843是TI首款A(yù)OP傳感器
IWR6843是TI首款“AOP”(Antenna-on-Package)傳感器,由于將天線(xiàn)封裝在一起,整個(gè)器件的尺寸縮小到75%,降低了系統(tǒng)總成本。IWR6843的帶寬高達(dá)4 GHz,能夠以高于24 GHz窄帶解決方案20倍的精度感測(cè)到物體、人以及非常細(xì)微的運(yùn)動(dòng),甚至是呼吸和打字這樣的動(dòng)作都能感測(cè)到。“IWR6843擴(kuò)展了樓宇和工廠自動(dòng)化功能,實(shí)現(xiàn)了更智能的人員計(jì)數(shù)、運(yùn)動(dòng)感測(cè)、機(jī)器人技術(shù)、安全防護(hù)和生命體征監(jiān)控等。”Ferguson說(shuō),“其集成的處理功能使傳感器能夠減少誤報(bào)并做出實(shí)時(shí)決策,從而無(wú)需在許多系統(tǒng)中使用外置MCU或CPU。”
場(chǎng)景三:體征探測(cè)
上文提到的智能交通用例中的WR1642是77GHz毫米波傳感器,能夠感測(cè)到非常細(xì)微的運(yùn)動(dòng)、甚至是呼吸,從而提示有人存在。這個(gè)性能適用于體征探測(cè)、測(cè)量車(chē)門(mén)和車(chē)身周?chē)氖S嗫臻g和障礙物、車(chē)輛承載情況、入侵警報(bào)和更智能化的自動(dòng)泊車(chē)。
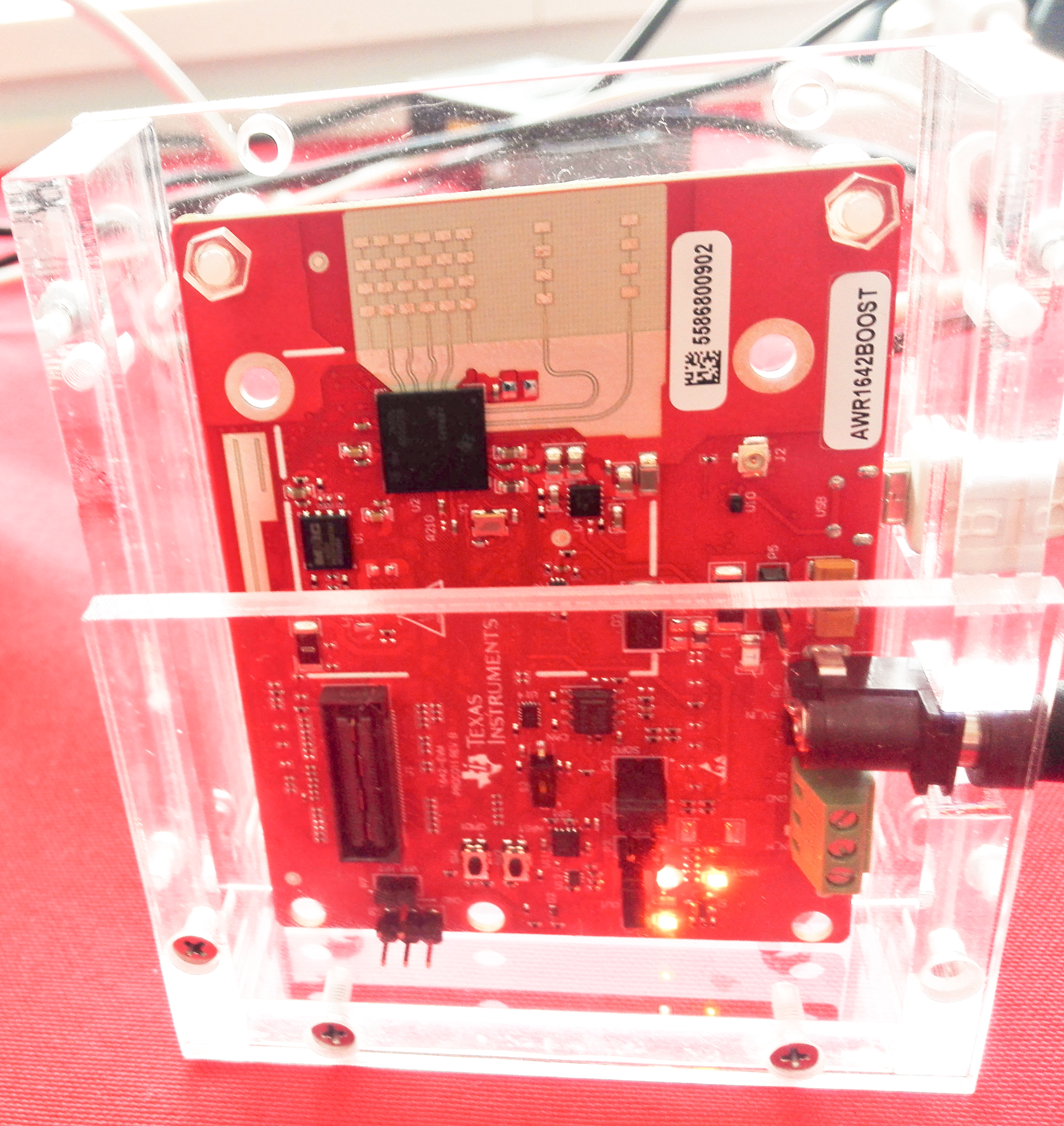
圖:AWR1642可以實(shí)現(xiàn)醫(yī)療級(jí)體征測(cè)試(心跳、呼吸)
據(jù)TI中國(guó)區(qū)嵌入式產(chǎn)品系統(tǒng)與應(yīng)用總監(jiān)蔣宏介紹,毫米波雷達(dá)在醫(yī)療級(jí)體征監(jiān)測(cè)上有很多場(chǎng)景應(yīng)用。如病人在深度睡眠、淺度睡眠的不同狀態(tài)下的高精度的呼吸監(jiān)測(cè),又如重度燒傷病人,醫(yī)療監(jiān)護(hù)儀不能直接接觸,對(duì)病人呼吸、心跳體征的24小時(shí)實(shí)時(shí)監(jiān)測(cè)就可以用毫米波雷達(dá)來(lái)實(shí)現(xiàn)。另外一個(gè)是老年監(jiān)護(hù),在洗手間這類(lèi)不適合設(shè)置攝像頭的地方,也可以布置毫米波雷達(dá)。
圖:這個(gè)演示的上圖是車(chē)內(nèi)嬰兒檢測(cè)實(shí)驗(yàn),毫米波傳感器被懸掛在天窗上,在可視化圖表中檢測(cè)結(jié)果顯示為一張熱量圖,該應(yīng)用可防止嬰兒遺留車(chē)內(nèi);下圖演示檢測(cè)車(chē)輛后方的可能入侵者。該應(yīng)用還可以通過(guò)先進(jìn)的算法,區(qū)分人和移動(dòng)的物體如風(fēng)中的樹(shù)枝等。如果和攝像感測(cè)搭配使用,則可以減少誤報(bào)警的情況。
場(chǎng)景四:汽車(chē)應(yīng)用
圖:某方案商采用TI的77GHz MMIC設(shè)計(jì)的4D雷達(dá),可以達(dá)到16線(xiàn)激光雷達(dá)的點(diǎn)云成像水平,滿(mǎn)足L2-L3級(jí)需要。
這個(gè)應(yīng)用令人驚訝,畢竟點(diǎn)云成像一貫是激光雷達(dá)的領(lǐng)地。
圖:通過(guò)4個(gè)AWR1243級(jí)聯(lián)后,遠(yuǎn)距離分辨力大大提高,40米處可以做到1度的方位角分辨率,也就是4.5厘米的精度和大約9厘米的物體分離精度。4個(gè)3發(fā)4收的AWR1243雷達(dá),就是192個(gè)天線(xiàn),這樣通過(guò)在車(chē)身四周角的配置,可以實(shí)現(xiàn)自動(dòng)泊車(chē)和高速場(chǎng)景中的360度監(jiān)測(cè)。
據(jù)悉,TI為其毫米波雷達(dá)產(chǎn)品線(xiàn)提供的SDK包括示例算法和軟件庫(kù),通過(guò)不到20個(gè)的簡(jiǎn)單API來(lái)簡(jiǎn)化RF設(shè)計(jì)。
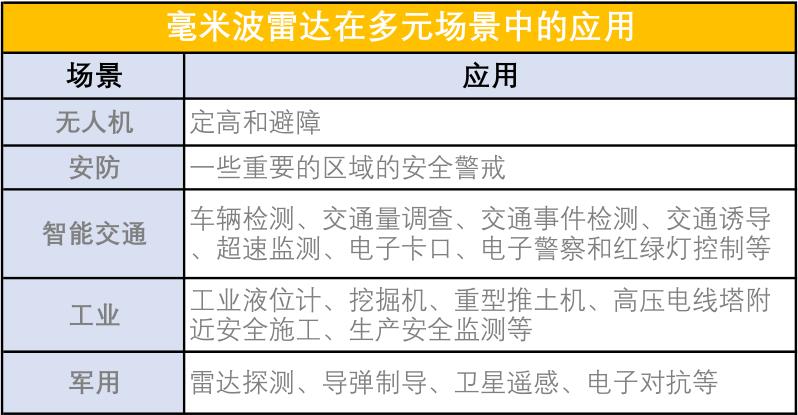
附:毫米波雷達(dá)在多元場(chǎng)景中的應(yīng)用
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
ti
+關(guān)注
關(guān)注
112文章
7985瀏覽量
212585 -
MMIC
+關(guān)注
關(guān)注
3文章
413瀏覽量
24327 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1048瀏覽量
64419
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
毫米波雷達(dá)信號(hào)的傳輸特性
1. 引言 毫米波雷達(dá)作為一種高精度的探測(cè)技術(shù),其信號(hào)的傳輸特性對(duì)于系統(tǒng)的性能至關(guān)重要。本文將探討毫米波雷達(dá)信號(hào)的傳輸特性,包括其傳播損耗、多徑效應(yīng)、雨衰等,并分析這些特性對(duì)
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別 在現(xiàn)代科技領(lǐng)域,傳感器技術(shù)扮演著至關(guān)重要的角色,尤其是在自動(dòng)駕駛、工業(yè)自動(dòng)化和機(jī)器人技術(shù)等領(lǐng)域。
毫米波雷達(dá)與激光雷達(dá)比較 毫米波雷達(dá)在自動(dòng)駕駛中的作用
毫米波雷達(dá)與激光雷達(dá)的比較 毫米波雷達(dá)與激光雷達(dá)是自動(dòng)駕駛
毫米波雷達(dá)工作原理 毫米波雷達(dá)應(yīng)用領(lǐng)域
毫米波雷達(dá)工作原理 1. 毫米波雷達(dá)的基本結(jié)構(gòu) 毫米波雷達(dá)系統(tǒng)通常由以下幾個(gè)主要部分組成: 發(fā)射
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達(dá)數(shù)據(jù)采集、可視化及存儲(chǔ)方案
自動(dòng)駕駛技術(shù)飛速發(fā)展,毫米波雷達(dá)因其出色性能已成為自動(dòng)駕駛傳感器套件的關(guān)鍵!本文以4D毫米波雷達(dá)

康謀技術(shù) | 毫米波雷達(dá)技術(shù)解析
自動(dòng)駕駛技術(shù)飛速發(fā)展,毫米波雷達(dá)已成為自動(dòng)駕駛傳感器套件的關(guān)鍵。為此,康謀為您深度解析毫米波雷達(dá)

什么是毫米波雷達(dá)?毫米波雷達(dá)模組選型
一、什么是毫米波雷達(dá)毫米波雷達(dá)是一種非接觸型的傳感器,其工作頻率范圍涵蓋10毫米(30GHz)至1毫米

毫米波雷達(dá)與多普勒雷達(dá)區(qū)別是什么
毫米波雷達(dá)與多普勒雷達(dá)是兩種不同類(lèi)型的雷達(dá)系統(tǒng),它們?cè)诠ぷ髟怼?yīng)用領(lǐng)域和性能特點(diǎn)等方面存在明顯的區(qū)別。 工作原理 毫米波
簡(jiǎn)述毫米波雷達(dá)的結(jié)構(gòu)、原理和特點(diǎn)
毫米波雷達(dá)是一種利用毫米波段電磁波進(jìn)行探測(cè)和測(cè)量的雷達(dá)系統(tǒng),具有高分辨率、高靈敏度、高抗干擾能力等特點(diǎn),在軍事、航空、航天、交通、氣象等領(lǐng)域
毫米波雷達(dá)具有哪些特點(diǎn)和優(yōu)勢(shì)
毫米波雷達(dá)是一種利用毫米波段電磁波進(jìn)行探測(cè)和測(cè)量的雷達(dá)系統(tǒng)。它具有許多特點(diǎn)和優(yōu)勢(shì),使其在許多領(lǐng)域得到廣泛應(yīng)用。以下是
除了“上車(chē)”,毫米波雷達(dá)還可以有很多選擇
小米汽車(chē)MAX版以11顆超聲波雷達(dá)、3顆毫米波雷達(dá)、1顆激光雷達(dá)的感知配置和不到三十萬(wàn)價(jià)格被譽(yù)為最具性?xún)r(jià)比的選擇。當(dāng)前,激光雷達(dá)和

基于毫米波雷達(dá)的手勢(shì)識(shí)別算法
遠(yuǎn)程手勢(shì)識(shí)別模型。然后,我們?cè)O(shè)計(jì)了一個(gè)CNN來(lái)學(xué)習(xí)點(diǎn)的特征以進(jìn)行識(shí)別。(ii)我們利用毫米波雷達(dá)傳感器來(lái)實(shí)現(xiàn)所提出的模型,從而自動(dòng)識(shí)別手勢(shì)。(iii)我們驗(yàn)證了我們提出的模型在幾種現(xiàn)實(shí)世界情況下(例如
發(fā)表于 06-05 19:09
毫米波雷達(dá)在智能網(wǎng)聯(lián)汽車(chē)中的應(yīng)用
毫米波雷達(dá)(MMW)是一種新型的雷達(dá)技術(shù),逐漸在智能網(wǎng)聯(lián)汽車(chē)中得到廣泛應(yīng)用。它利用毫米波頻段的電磁波進(jìn)行探測(cè)和測(cè)距,具有高分辨率、高精度、高
毫米波雷達(dá)的作用 毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
毫米波雷達(dá)是一種高頻率雷達(dá)系統(tǒng),可以在毫米波頻段(30-300 GHz)進(jìn)行物體探測(cè)和測(cè)距,由于其具有高分辨率、較低的互相干擾和較強(qiáng)的透射穿透能力,被廣泛應(yīng)用于眾多領(lǐng)域。而超聲波
毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別聯(lián)系
毫米波雷達(dá)(Millimeter-wave Radar)和超聲波雷達(dá)(Ultrasonic Radar)是兩種常用于測(cè)距和探測(cè)的技術(shù),在原理、應(yīng)用、優(yōu)缺點(diǎn)等方面存在著一些明顯的區(qū)別。 一





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論