 L5級自動駕駛到底能給我們帶來什么?
L5級自動駕駛到底能給我們帶來什么?
汽車領域技術創新、格局演變,這是全球汽車人都在關注的重要議題。當世界汽車巨頭都在強調“中國市場”之時,我們試圖將目光轉向全球:面對汽車產業新四化,世界級的汽車玩家正在做什么?
第一站:探秘密歇根M-city實驗室,對話自動駕駛領域重要人物彭暉。
2015年7月20日,位于美國底特律以西40英里的密歇根大學正式開放全球首個無人駕駛汽車封閉試驗場:M-city。從加州伯克利大學博士畢業、近30年來一直圍繞汽車安全與節能做研究的密西根大學講座教授彭暉,參與并主導了M-city從構想到實現的全過程。M-city之后,在美國硅谷、新加坡維壹科技城、中國上海、日本茨城縣等多地先后建起自動駕駛測試場。
如今,你可以看到密歇根大學的學生和教職工們搭乘12英里/時的無人駕駛校園巴士在園區內穿梭。這是M-city實驗室項目的一部分,終極目標是讓無人駕駛更安全。對于這個重要議題,M-city和它的頂級工程師們有著清晰的計劃和判斷,但也毫不避諱當下還未攻破的技術難題,和對未知的不確定。
口述 | 密歇根大學M-city實驗室主任 彭暉
采訪 | 搜狐汽車駐底特律記者 麗莎
1、故事的開始
2013年,我們開始構想建立一個無人駕駛測試場。為什么會有這個想法呢?
其實1988-1992年,我在加州伯克利分校念博士,論文題目就是高速公路自動化,當然那個時候場景比較簡單。這么講起來,讓汽車駕駛實現自動化不是這幾年才有的事情,比我們更早的時候就有人嘗試用磁條、磁釘、camera(攝像頭)來做研究。所以把“駕駛功能自動化”這件事已經有幾十年的研究背景了。
當年為什么要建M-City?
因為我們認識到技術、硬件有很多進步,包括感測器、計算能力、人工智能、通信……在太多太多方面已經有大規模的進步,我們覺得時機比較成熟了。所以 2013年左右就開始構想這件事情,2015年7月就正式開放了。我們確實是全世界第一個為智能網聯汽車建造的自動駕駛測試場。
M-city是密歇根大學牽頭來做的,目前已經投了大概1200萬美金,土地是無償給我們用的。M-City是開放的,不論是不是我們的會員,任何車企都可以來做測試。當年蓋這個場地的時候,目的就不只是為高校教授、研究生做實驗用的。我們現在有60個繳費企業會員,其實目前所有測試者中,校外企業占到7、8成。
那我們做什么測試呢?
M-City主要有兩大場域,一個是高速公路,一個是城區。高速公路上有匝道、變道、超車等場景測試;城區里最糟糕的就是路口,在測試的時候我們重點會研究如何控制行人、自行車等和自動駕駛車輛的互動。
我們自己對未來有非常清楚的計劃,叫做L4級別的ABC Test。我們想象有一輛車來測試,必須要通過三道關卡。A是Accelerated evaluation 加速驗證;B是behave competence,表示說要達標幾十項技能;C是corner cases,有一些特別容易出錯的場景。
我們的想法是,未來車輛測試過程中,要保證達到一定的標準,就要通過ABC Test這三關測試。未來一年我們會先把behave competence做出來。
其實在測試過程中,目前沒有什么統一的測試標準。美國沒有,中國沒有,日本沒有,歐盟沒有,全世界都沒有標準。
比如你說在歐盟做NCAP(新車碰撞測試),它有一套程序,那是歐盟自己定的,中國、日本、美國不見得完全聽它的;像在美國做高速公路安全測試的IIHS(美國公路安全保險協會),它不是政府機關,是屬于第三方的,沒有政府的公信力。
2、還未攻破的技術難題
現在研究自動駕駛的機構非常多,自動駕駛最重要的技術,一是sensing(感測);二是perception(感知),就是知曉到底看到了什么東西;三是planning(規劃);四是control(控制)。這每一項都很重要,需要相互補充。但如果說現在自動駕駛技術面臨的最大挑戰和瓶頸,那就是perception。
人是很聰明的,比如在一個交通場景中,我一眼就能看出來這是一輛黑顏色的汽車、這是一個油箱、這是一輛自行車、旁邊有一棵樹……人類不會因為辨別事物而困惑,立刻就能抓到重點。但感知對于機器來說還是很有挑戰性的。汽車實際“看”到的我們叫點云:這個pixel是什么,那個距離是多少,然后再去思考那個是車嗎?那個是人嗎?現在雖然機器已經很厲害了,比如下圍棋超過了人類,但是在perception(感知)層面機器還遠遠不如人類。
在perception方面,我們大概有一個方法可以解決98%、99%的問題,但那剩下的1%、2% 越來越難解決。你從0到80很容易,從80到90難度變大、90到95更難,最后那1% 最難。你問我有沒有把握push到99.99%?其實沒有人有把握。
歷史上我們做過很多不同的approach(方法)。比如現在是用神經網絡,我用大量的資料去做訓練。完了以后我一看,喲,它可以做到98%,很高興。可是你說下一步從98% 怎么到99% ?坦白說不太清楚,因為它太復雜,它是一個神經網絡。甚至我們在訓練的過程中,結果時好時壞。比如今天有一個神經網絡我調到了98%,并不表示繼續調會變成99%,搞不好會變成95%,所以不同的方法往前走的路徑其實是不清楚的。
那怎么解決這個難題呢?
我們常常說最終的解決方式可能是結合幾個99%的solution(方法),達到一個99.999% 安全的程度。而不是一直push一個方法達到99.99%,那個太困難。
3、一個負責的車企不應該做L5自動駕駛
我們研究自動駕駛,從一開始大家覺得特別火、特別激進,到現在又進入到過度悲觀。這里有一個現象叫hype cycle(發展規律周期)。不只是自動駕駛,包括我們講的3D打印、人工智能、5G、電動車等等,任何新的觀念出來,大家一開始都會過度樂觀,然后過度悲觀,最后回歸理性,過程常常都是這樣。這是好多年來大家已經都承認的,社會就是這樣。
現在自動駕駛正在從過度樂觀向過度悲觀發展,慢慢還會反彈回歸理性。
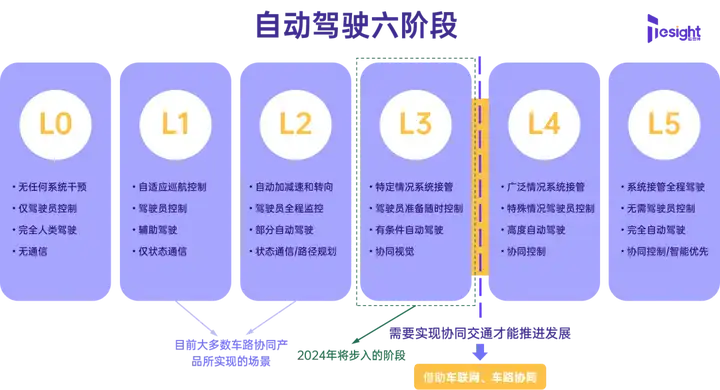
至于什么時候自動駕駛可以達到L5級別?
我們常說operational design domain(ODD),自動駕駛系統設計的時候就畫定了運營范圍,在這個場景之下必須有把握能做好。
那么現在市面上有沒有L4?有啊,我們密歇根大學不是有無人巴士嘛,它跑得很慢,每小時12英里,只在校園內運行。法國、奧地利、澳洲、新加坡好多地方都有L4級無人巴士。如果你仔細去看的話,全世界做L4級別展示的汽車,要么是直線來回,要么是順時針轉圈,不用左轉。
就是說這個operational design domain 是12英里/小時只能右轉不左轉,下雨、下雪天就不開了。我們得認清現實,技術不完全成熟,只能在小范圍內跑。但是好處是什么呢?不會撞死人,不會撞傷人,在這里面跑得挺好。那明年是不是可以把12英里/小時變成15英里/小時?是不是下點小雨還可以開?
實際上,我不認為我們哪一天會看到L5的汽車。
為什么呢?設計汽車都有它的目的,如果要賣到沙特阿拉伯,對冷卻系統就有額外要求;如果要賣到南極,就要重視低溫環境;如果要買到北美市場,就要用北美的data(數據)去train(訓練自動駕駛神經網絡);如果要賣到中國,就應該用中國的data去train。
換句話說,今天設計一個L5的汽車其實是在浪費錢、浪費時間。身為一個負責任的工程師,我不應該說我要設計一個L5的汽車,而應該說我設計的L4汽車在這個范圍內保證安全,且最低成本。這才是一個負責的工程師該做的事情。
所有的車在未來幾十年之內都應該只有L4級別,誰要是說我設計一個L5,其實大部分時候他是在浪費錢。我不認為一個負責的車企應該去設計一個L5的汽車,追求L5不應該是一個工程師的目的。
-
自動駕駛
+關注
關注
784文章
13786瀏覽量
166399
原文標題:彭暉:做L5級自動駕駛是浪費錢
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
通用汽車正全力推進L3級自動駕駛系統的開發
經緯恒潤全冗余R-EPS助力L4級自動駕駛落地

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
Mobileye引領自動駕駛新紀元:L4級無人駕駛系統在德國成功路測
百度發布全球首個L4級自動駕駛大模型
雷諾集團將與自動駕駛公司WeRide達成合作
百度發布全球首個L4級自動駕駛大模型Apollo ADFM
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
NVIDIA和昊鉑宣布雙方將合作量產L4級自動駕駛汽車

百舸爭流之勢!L3級自動駕駛進入路測階段
康謀方案 | L2進階L3,數據采集如何助力自動駕駛
自動駕駛產業鏈爆發前夜?多家車企宣布已獲得L3級自動駕駛路測牌照






 工商網監
工商網監
評論