 雙相機立體視覺和結構光立體視覺原理及優勢對比
雙相機立體視覺和結構光立體視覺原理及優勢對比
目前的深度相機根據其工作原理可以分為三種:TOF相機、雙相機立體視覺、結構光投射立體視覺。
1.TOF
TOF是Time of flight的簡寫,直譯為飛行時間的意思。所謂飛行時間法3D成像,是通過給目標連續發送光脈沖,然后用傳感器接收從物體返回的光,通過探測光脈沖的飛行(往返)時間來得到目標物距離。
TOF相機與普通機器視覺成像過程也有類似之處,都是由光源、光學部件、傳感器、控制電路以及處理電路等幾部單元組成。TOF相機不僅可以獲取到深度信息還可以獲取到圖像的灰度信息,微軟kinect2即是基于TOF原理的深度相機。
TOF 相機目前的主要應用領域包括:物流行業,安防和監控,工業視覺,工業定位、工業引導和體積預估;替代工位上占用大量空間的、基于紅外光進行安全生產控制的設備,醫療和生物,互動娛樂等領域。
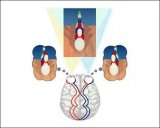
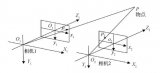
2.雙相機立體視覺
雙相機立體視覺指的是目前大家都在熱點研究的,僅依靠雙相機的視差獲取深度信息的方式。雙相機立體視覺相機因為非常依賴純圖像特征匹配,所以在光照較暗或者過度曝光的情況下效果都非常差,另外如果被測場景本身缺乏紋理,也很難進行特征提取和匹配。例如純色的背景。
3.結構光投射立體視覺
結構光是通過紅外IR發射端投射人眼不可見的偽隨機散斑紅外光點到物體上,每個偽隨機散斑光點和它周圍窗口內的點集在空間分布中的每個位置都是唯一且已知的。這是結構光的存儲器中已經預儲存了所有的數據。這些散斑投影在被觀察物體上的大小和形狀根據物體和相機的距離和方向而不同。拍攝到的斑點和已知斑點進行對比,然后獲取到深度信息。根據三種不同的距離使用了三種不同尺寸的散斑,這樣的目的是為了在遠中近三種距離內都能得到相對較好的測量精度:近距離(0.8 – 1.2 m):可以獲得較高的測量精度,中距離(1.2 – 2.0 m):可以獲得中等的測量精度,遠距離(2.0– 3.5 m):可以獲得較低的測量精度。
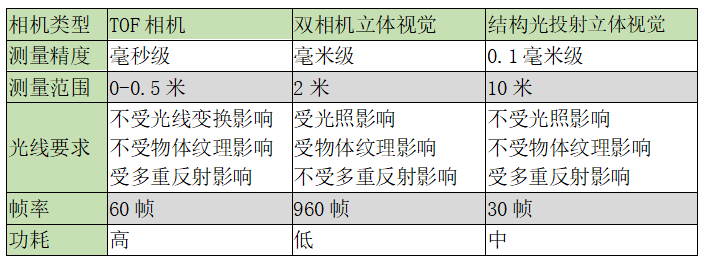
4.三種相機對比:
外星眼機器視覺從光線要求、幀率、測量范圍、功耗、測量精度等方面來給大家做下對比:
5.總結:
1.雙目方案,最大的問題在于實現算法需要很高的計算資源,導致實時性很差,而且基本跟分辨率,檢測精度掛鉤。也就是說,分辨率越高,要求精度越高,則計算越復雜,同時,純雙目方案受光照,物體紋理性質影響。
2.結構光方案,目的就是為了解決雙目中匹配算法的復雜度和魯棒性問題而提出,該方案解決了大多數環境下雙目的上述問題。但是,在強光下,結構光核心技術激光散斑會被淹沒,因此,不合適室外。同時,在長時間監控方面,激光發射設備容易壞,重新更換設備后,需要重新標定。
3.TOF方案,傳感器技術不是很成熟,因此,分辨率較低,成本高,但由于其原理與另外兩種完全不同,實時性高,不需要額外增加計算資源,幾乎無算法開發工作量,是未來發展的一個重要方向。
-
相機
+關注
關注
4文章
1350瀏覽量
53581
原文標題:深度相機—TOF、雙相機立體視覺、結構光立體視覺原理及優勢對比
文章出處:【微信號:UFO-VISION,微信公眾號:外星眼機器視覺網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
產品快訊 | Teledyne FLIR IIS發布最新產品信息

用于任意排列多相機的通用視覺里程計系統

德國進口蔡司體視顯微鏡的使用方法

立體視覺新手必看:英特爾? 實感? D421深度相機模組
居然還有這樣的10.1寸光場裸眼3D視覺訓練平板電腦?

新品 | Bumblebee X系列用于高精度機器人應用的新型立體視覺產品
Teledyne FLIR IIS推出一款用于高精度機器人的新型立體視覺產品
銀牛微電子3D視覺感知方案賦能小米CyberDog系列仿生四足機器人
總投資1.5億!蘇州清研微視立體視覺傳感器項目落戶安徽蕪湖

教你該如何操作體視顯微鏡

三維視覺測量技術:被動視覺測量和主動視覺測量
雙目立體視覺是什么樣的技術?






 工商網監
工商網監
評論