 自動駕駛汽車它的產業鏈上下游已經出現支撐公司,并在逐漸走向成熟
自動駕駛汽車它的產業鏈上下游已經出現支撐公司,并在逐漸走向成熟
自動駕駛汽車它的產業鏈上下游已經出現支撐公司,并在逐漸走向成熟。
自動駕駛分級標準
關于自動駕駛的分級,主要有SAE(美國機動車工程師學會)標準和NHTSA(國家公路交通安全管理局)兩個標準;目前,前者受到大多數業內人士的認可,它從Lv0-Lv5將自動駕駛依據控制方式和適用環境分為了6個等級。
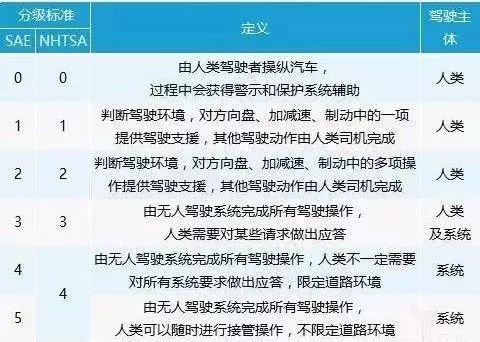
自動駕駛行業的最終目標,必然是實現真正的無人駕駛(Lv5),而實現的方式主要分為兩種思路:①從Lv0逐步過渡到Lv5,通過整合集成ADAS中的控制功能,實現真正的無人駕駛②直接從Lv0跨度到Lv4,在特定的垂直領域和相對封閉的環境中推進無人駕駛,再向Lv5,也就是全環境全路況的無人駕駛普及。
根據SAE分級,不難看出,從Lv4開始,真正的控制者由人開始轉為自動駕駛系統,責任主體也隨之轉移。因此,在設計研發之初,ADAS之中的輔助駕駛功能就與無人駕駛的目的不同,尤其在經歷Lv3、Lv4這兩個階段是時,由于責任主體發生改變,因此在法律、輿論上面臨著許多尚未可知的困難。
不過,ADAS的感知部分,以及不少輔助駕駛功能,例如自動巡航、自動泊車、前車碰撞緊急制動等,都可以在無人駕駛汽車當中得到應用,因此,也為無人駕駛的最終實現貢獻了不小的力量。
自動駕駛汽車產業鏈剖析
為了推動無人駕駛汽車行業的進步,方便大家參考,億歐對自動駕駛汽車行業進行了產業鏈分析,主要從產業上下游將其分為了感知、計算平臺、算法集成、車輛控制、汽車通訊、無人駕駛汽車運營等六個方面。
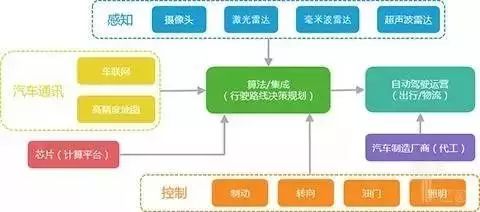
(自動駕駛產業鏈結構圖)
下面,本文將會對產業鏈上的各個部分進行單獨剖析。
感知
自動駕駛汽車的感知部分,主要由攝像頭、激光雷達、毫米波雷達、超聲波雷達等多種方式共同組成。
由于各種感知方式在不同環境、不同距離、不同作用上各有所長,因此采用多傳感器信息融合的方式有利于保證全方位信息的收集,進而使計算機做出更加精準的判斷和規劃。
激光雷達
目前,激光雷達的生產廠商集中在國外,包括美國Velodyne公司、Quanegy公司以及德國的Ibeo公司等,國內激光雷達初創公司也在盡力追趕。

激光雷達的穿透距離遠,高性能激光雷達可以實現200米范圍內,精度高達厘米級的3D場景掃描重現,從而幫助自動駕駛系統實現提前行駛路線規劃。
目前來看,多線激光雷達很有可能是未來無人車的必備傳感器,并且與高精度地圖及駕駛系統核心算法緊密相關。目前,多線激光雷達還沒有針對車規級的成熟量產方案,機械旋轉式多線激光雷達雖然已在普遍應用,但體積較大且價格過于昂貴,更小型更低成本的純固態激光雷達還未見到成熟產品。
國內有不亞于國外的光機電技術基礎,產業鏈比較完整,因此,諸多深耕激光雷達領域的公司還有不小的機會。
毫米波雷達、超聲波雷達
除了激光雷達之外,近年來毫米波雷達和超聲波雷達也逐漸成為自動駕駛汽車中,參與多傳感器信息融合感知設備。其中,最為知名的例子就是特斯拉在其智能汽車中,完全沒有使用激光雷達,而采用毫米波雷達+攝像頭的方案。
另外,類似博世、大陸這樣的智能輔助駕駛巨頭,也在毫米波雷達和超聲波雷達這樣成本較低傳感器設備上,擁有比較深刻的技術積累和應用經驗。
而在國內,像行易道這樣的毫米波雷達廠商,也在積極進行技術開發,追趕國際巨頭水平。
不過,歸根結底,特斯拉還只是高級輔助駕駛系統(ADAS),而當操作主體,也就是責任主體向機器轉移時,僅僅通過攝像頭和毫米波雷達實現自動駕駛功能是不夠的,激光雷達所帶來的功能性安全冗余非常必要。
攝像頭(計算機視覺)
目前,通過攝像頭進行拍攝,在進行圖像和視頻識別,確定車輛前方環境,是自動駕駛汽車的主要感知途徑,這也是很多無人駕駛公司的主要研發內容之一。
不過,在這一方面,ADAS要先于無人駕駛汽車向市場推廣,因此在數據收集反饋、工程化等方面,ADAS公司也處于領先地位。
國內雙目ADAS公司中科慧眼CTO崔峰就表示,在未來無人駕駛汽車中,攝像頭(雙目)將成為重要的感知部分,中科慧眼未來努力的目標,也是為自動駕駛汽車,乃至各類出行機器人提供機器視覺方面的技術支持。
目前,車載攝像頭主要分為單目和雙目兩種。
雙目攝像頭基于視差原理,可以在數據量不足的情況下,測定車輛前方環境(樹木、行人、車輛、坑洞等),并且獲得準確的距離數據,用以提供給自動駕駛系統進行車輛控制。

而單目攝像頭,主要基于機器學習原理,使用大量數據進行訓練,進行環境識別。盡管需要大量數據支持,且在惡劣光線條件下的表現不如雙目攝像頭,但其相對便宜的價格以及成熟的技術也獲得了一部分公司的青睞。

在單目ADAS領域,以色列公司Mobileye是世界最頂尖的企業,而中國公司與這樣的國外巨頭依然存在一定的差距。
汽車通訊
汽車通訊主要可以分為兩個方面。
第一,是車聯網系統。
通過車載通訊設備,完成人與車、車與車、車與環境的信息交互,一方面可以完善運營車輛(出租車、網約車、公交車、物流貨車等)和道路交通(如紅綠燈)的調度安排,另一方面可以減少車輛的感知設備投入,將車輛及環境采集到的信息與車輛自身采集的信息相融合,從而實現自動駕駛功能。
不過,車聯網(包括V2X,車輛對外界信息交換)的發展,除了需要大大小小各家公司的努力之外,同樣需要政府和相關機構的幫助。
首先是制定V2X通訊標準,歐美在此前就已經將DSRC標準列為了其車輛通訊標準,而國內則是LTE-V標準的呼聲比較高。
另外,車聯網不僅僅局限于車輛上的通訊系統配備,還涉及到道路交通基礎設施建設。目前,杭州、南京、北京等地,都已經開始了智慧城市和智慧交通的試點。
車聯網技術的前身,TelemaTIcs(遠距離通信與信息科學),在很早以前就已經出現,而大概在四五年前,由于物聯網的興起,出現了“車聯網”這個詞。其更大的作用,不僅限于保證自動駕駛功能運行,而在于未來車輛中內容行業的發展。
第二,是高精度地圖。
高精度地圖是自動駕駛汽車實現路線規劃的基礎,這些年,衛星導航和基于激光雷達的3D環境建模技術日益成熟,高精度地圖測繪質量逐步提升,這為自動駕駛的研發提供了不小的助力。
國內高精度地圖,以百度地圖、高德地圖、四維圖新等公司為主力;而國外方面,Here、TomTom等公司一直備受稱贊。
計算平臺
自動駕駛系統的計算量、數據流都非常大,同時又需要較快的反應速度,因此就需要匹配合適效能的計算資源,保證計算工作的正常運行。
自從吳恩達發現GPU非常適合進行深度神經網絡訓練以來,英偉達就在這一次的人工智能浪潮之中大發了一筆橫財。目前,據不完全統計,全球已有超過1500家人工智能初創公司使用英偉達的產品,其中還有不少自動駕駛技術公司。
在2017年CES上,英偉達發布了最新的車載計算平臺“XAVIER”,其512 個Volta CUDA 核心可提供高達30TOPS的計算性能,并且功率只有30W,遠遠優于Drive PX2。
而在國內,人工智能創業圈子中聲名赫赫的地平線機器人,也正在研發其基于FPGA架構的大腦引擎(BPU),而代號為“高斯”的計算構架IP預計在2019年底推出。
不過,綜合來看,自動駕駛計算平臺的爭奪戰依然主要在國際巨頭之間展開,除了英偉達之外、英特爾、微軟、Ceva、Mobileye、恩智浦、德州儀器、高通等芯片、IP、ADAS供應商,都正在瞄準這一領域發力,未來的競爭激烈程度可見一斑。
車輛控制
自動駕駛汽車不僅僅是感知和算法,它還涉及到車輛控制、汽車動力學、汽車工程等諸多技術學科,同時需要汽車控制(剎車、轉向、燈光、油門等)配件的支持。
目前,自動駕駛執行相關的技術和部件產品將依然長期掌控在大型Tier1手中。如博世、大陸、Delphi等傳統的Tier1掌握的執行控制專利技術已經可以支撐到自動駕駛階段,無論在性能還是價格上都有絕對的優勢。
此外,由于電動汽車技術的快速革新,傳統汽車制造業受到了沖擊,此前發動機和變速箱等壁壘技術,逐漸被車輛電控、電動機、電池等技術取代。這種變革,讓創業團隊自己造車成為了可能。
因此,國內外眾多電動汽車、互聯網造車、智能汽車企業極有可能成為自動駕駛汽車行業的新貴。
智車優行CEO沈海寅曾表示,在智車優行未來戰略規劃中,自動駕駛是關鍵一環。目標是在三到四年內在一些局部路況下的全自動駕駛。
算法與自動駕駛汽車運營
目前,大多數踏入自動駕駛行業的初創公司,可以看作算法集成層面的公司。
他們利用高精度地圖進行路線規劃,采用新型計算平臺,整合多傳感器信息,開發相應的車輛控制算法對汽車進行行為控制。
目前,自動駕駛技術公司的兩級分化比較嚴重,一方面是看準時間和角度切入的初創企業,另一方面則是大型互聯網科技巨頭,如谷歌、百度、Uber等。此外,像博世這樣,少量擁有相對完整的產業鏈結構的Tier1,也在踏足這一領域。
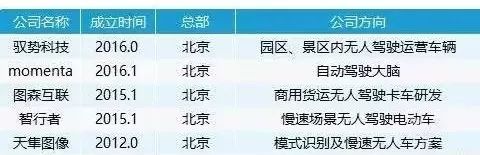
不過,這些進行無人駕駛汽車研發的公司,大多有更深的想法,它們并不把自己看做單純的技術提供方,而是希望深入到運營中去。例如智行者希望能夠首先在低速園區內進行無人駕駛運營,而圖森互聯則在一開始就瞄準了長途高速貨運。Uber與其收購的Otto也將目光分別聚焦在了無人駕駛共享出行和長途貨運上。
圖森互聯CEO陳默表示,相比于賣車,運營服務公司是更靠近產業鏈下游和利益鏈頂端的方式。
自動駕駛汽車的另一個特點,就是解放了我們在出行過程中的雙手、眼睛和大腦,因此車內活動也有了更多的想象空間。馭勢科技CEO吳甘沙曾在多次公開演講中表示,未來,自動駕駛汽車很有可能成為新的商業場景,為人們提供出行時的觀影、辦公、餐飲服務。
傳統車廠去了哪里?
與自動駕駛相對應的,是自動駕駛+共享經濟的出行模式,C端用戶消費的將不再是汽車,還是出行服務。
業內人士普遍認為,在自動駕駛時代,汽車利用率將直線上升而銷量必定下降,車廠的選擇,一是盡快尋求合作,進行技術開發,向自動駕駛領域轉型;二則是淪為自動駕駛汽車的代工廠和供應商。
因此,大多數車廠更希望看到的是Lv4甚至以下等級的自動駕駛技術,而不是Lv5狀態下的全路況無人駕駛汽車。
目前,包括福特、寶馬、沃爾沃在內的整車廠商,也都在進行自動駕駛技術的研發。
自動駕駛的實現,任重道遠
雖然自動駕駛在產業鏈的各個層次上,均有不錯的公司提供支撐,基本形成了上下游產業格局,但依然存在以下問題需要解決:
①道路基礎設施不完善,需要進行智慧城市及智慧交通等基礎設施建設。
②法律法規不明確,目前,亟待出現相關法律法規,以供相關公司制定安全及設計標準。
③算法不可解釋,大多自動駕駛控制程序采用“端到端”的訓練方式,這當中的策略規劃有許多不透明的區域。
④設備價格昂貴,無論是激光雷達還是計算平臺,目前價格不能滿足大規模推廣的要求。
因此,要真正實現自動駕駛乃至無人駕駛,我們依然任重道遠。
-
adas
+關注
關注
309文章
2187瀏覽量
208714 -
產業鏈
+關注
關注
3文章
1351瀏覽量
25765 -
自動駕駛
+關注
關注
784文章
13877瀏覽量
166611
原文標題:一文讀懂自動駕駛汽車產業鏈上下游
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

標貝科技:自動駕駛中的數據標注類別分享

標貝科技:自動駕駛中的數據標注類別分享


FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
國產FPGA的發展前景是什么?
深度學習在自動駕駛中的關鍵技術
鴻海強化北美AI服務器產能,深化產業鏈布局
禾賽科技與Momenta簽署戰略合作,助力自動駕駛行業升級
【核芯觀察】IMU慣性傳感器上下游產業梳理(二)
【核芯觀察】IMU慣性傳感器上下游產業梳理(一)
智芯公司榮獲第七屆“IC創新獎”產業鏈合作獎

【核芯觀察】充電樁上下游產業梳理(一)





 工商網監
工商網監
評論