") 關(guān)于自動(dòng)駕駛汽車開發(fā)的思考
關(guān)于自動(dòng)駕駛汽車開發(fā)的思考
關(guān)注的主題主要還是安全,首先看一下安全,麥肯錫關(guān)于未來12項(xiàng)顛覆性技術(shù),從移動(dòng)互聯(lián)網(wǎng),一直到可再生能源,第六項(xiàng)就是關(guān)于自主駕駛的技術(shù),在他的報(bào)告里特別強(qiáng)調(diào)了自主駕駛的安全對(duì)全球交通安全帶來的潛在好處,同時(shí)也特別強(qiáng)調(diào)了自動(dòng)駕駛以后能夠產(chǎn)生的巨大經(jīng)濟(jì)效益,有社會(huì)效益,也有經(jīng)濟(jì)效益,報(bào)告出來以后,全球范圍里面自動(dòng)駕駛汽車的試點(diǎn)成為了熱點(diǎn)。
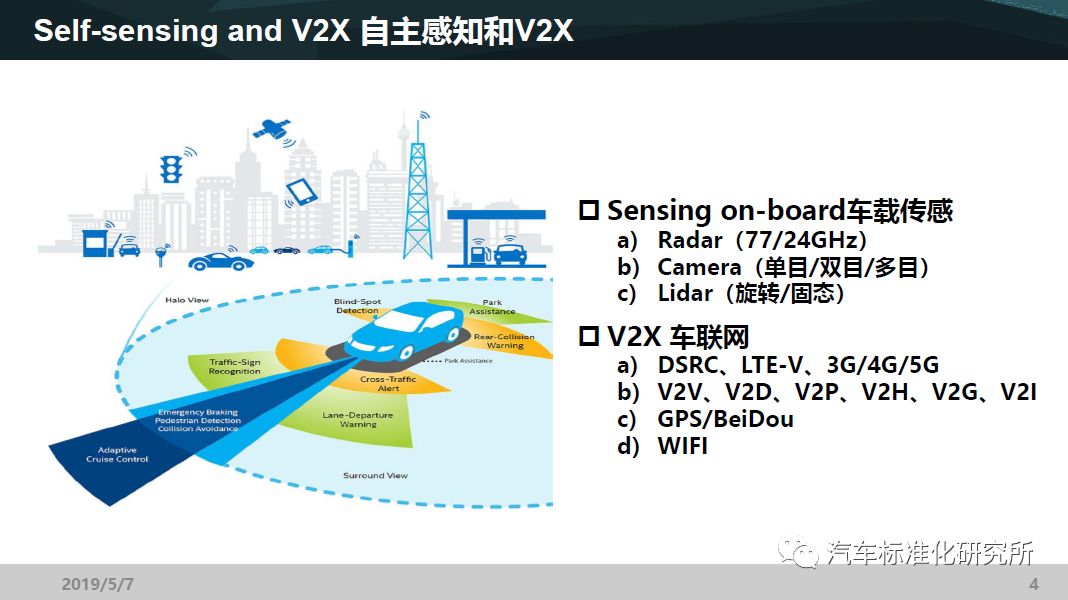
這個(gè)圖片比較清晰的給大家展示,汽車的感知,兩個(gè)主要的方面,一個(gè)是利用自己的傳感器進(jìn)行環(huán)境的感知和認(rèn)識(shí),第二個(gè)利用V2X技術(shù),還有云管端,進(jìn)行車路協(xié)同的駕駛方式,這個(gè)是大家不斷的進(jìn)行技術(shù)的探索,對(duì)未來進(jìn)行非常好的描繪,這張圖片大家都用的比較多,在SAE里面描述了五級(jí)的自動(dòng)駕駛,最左邊是人類駕駛目前來講還是最高水平的智能駕駛,最右邊是機(jī)器駕駛,基于人工智能,現(xiàn)在非常的熱,整個(gè)過程中,人承擔(dān)著駕駛的作用,或者說擔(dān)負(fù)的責(zé)任逐漸向機(jī)器轉(zhuǎn)移,這是非常非常美好的愿望,在這個(gè)過程中從整車層面可以實(shí)現(xiàn)安全、環(huán)保,從乘員角度可以做他想做的事情。我曾經(jīng)開玩笑,如果是大一點(diǎn)的車子,4個(gè)人坐在里面中國人可以打打麻將。
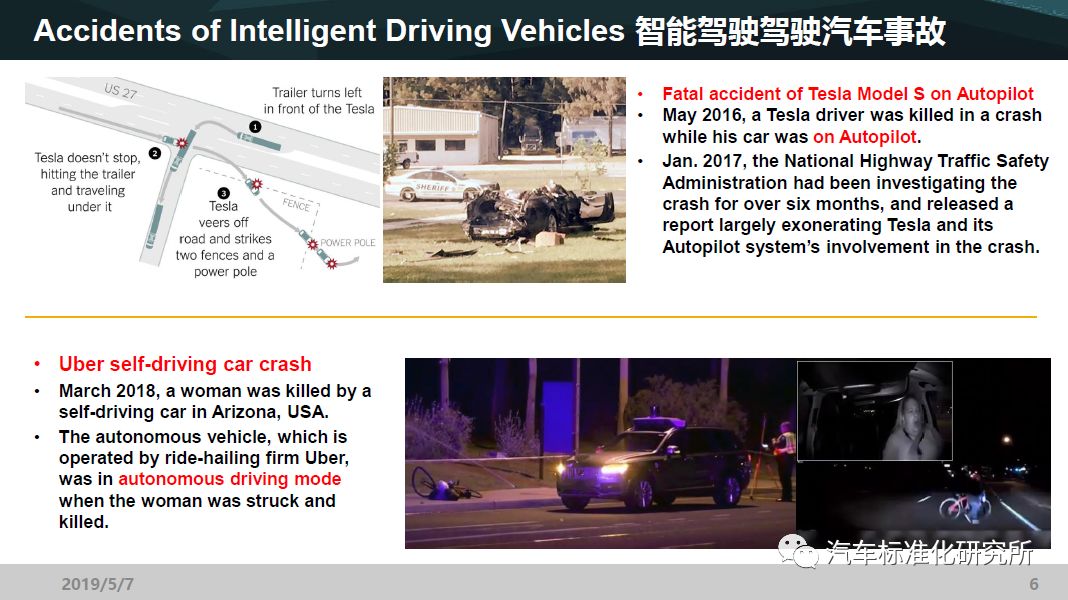
但是現(xiàn)在很殘酷,我也拿出了兩個(gè)典型的事故,一個(gè)是特斯拉的事故,還有一個(gè)是優(yōu)步的事故,在實(shí)際投入試運(yùn)營,或者商業(yè)化的過程當(dāng)中,它的智能水平還沒有達(dá)到L3以上,已經(jīng)出現(xiàn)了非常重大的惡性事故,我們平常也會(huì)聽到關(guān)于智能駕駛汽車測(cè)試評(píng)價(jià)的數(shù)據(jù),在這種情況下,對(duì)它的安全如何進(jìn)行評(píng)價(jià)和測(cè)量,的確需要我們進(jìn)行思考。

這里還有兩個(gè)非常有代表性的人物,他是智能駕駛汽車的開發(fā)者,經(jīng)過長期的研發(fā)以后,他表現(xiàn)出對(duì)智能駕駛汽車的保守和謹(jǐn)慎,蘋果的合伙人表現(xiàn)出來悲觀和不信任,他是一個(gè)典型用戶的代表,他曾經(jīng)對(duì)智能駕駛汽車非常的推崇,他買了特斯拉車以后,用了以后給出了極低的評(píng)價(jià),而且對(duì)未來非常悲觀。
這樣一些事件和典型人物的看法,他要提出來一個(gè)問題,對(duì)智能汽車的安全,測(cè)評(píng)非常重要的挑戰(zhàn),這里面結(jié)合相關(guān)的觀點(diǎn)我總結(jié)為三點(diǎn)
第一個(gè)是非常重要的差別,目前還處于研發(fā)幾輛樣車,在特定環(huán)境,特定用途,跟專業(yè)駕駛員在一起進(jìn)行測(cè)試評(píng)價(jià),這個(gè)距離我們汽車動(dòng)輒一個(gè)車型就是幾十萬輛,上百萬量,在全球范圍里面大規(guī)模的自由應(yīng)用,存在一個(gè)巨大的差別。
第二個(gè)就是目前安全的保證,盡管你做了幾十萬公里的實(shí)驗(yàn),但是你不能保證我投入市場(chǎng)以后它是絕對(duì)安全的。面對(duì)這兩個(gè)方面的挑戰(zhàn),我們必須要一起去思考我們?cè)趺礃佣唷I衔缬幸恍┐鸢福沁€不完整。
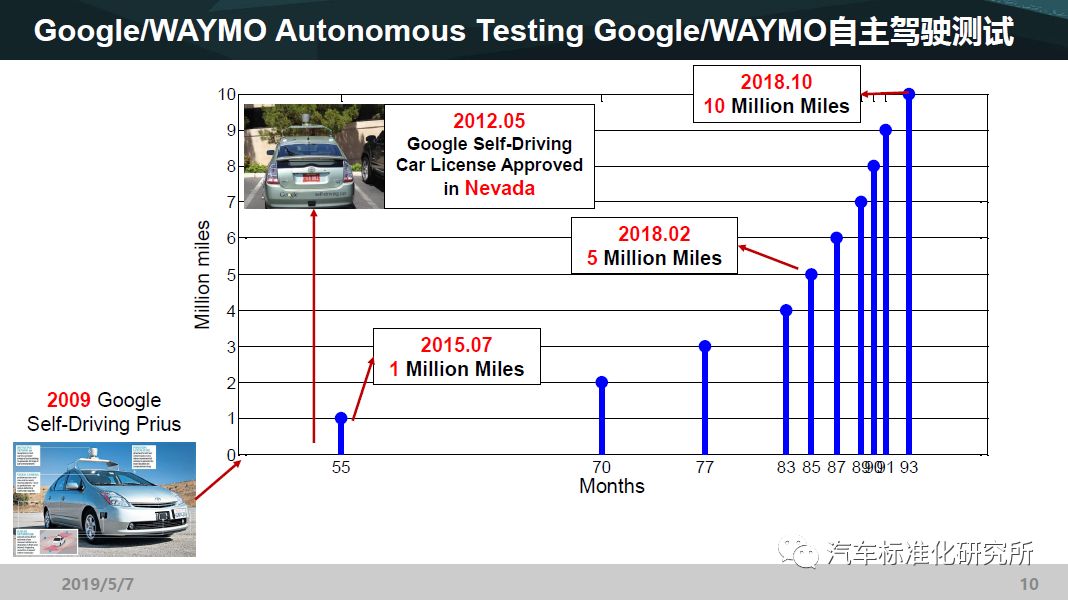
接下來看一下我們的基本思考,首先看一些數(shù)據(jù),谷歌從開始研發(fā)自動(dòng)駕駛汽車一直到成立新的公司以后,對(duì)自動(dòng)駕駛進(jìn)行測(cè)試的數(shù)據(jù),基本上2009年年底投入實(shí)驗(yàn),花了55個(gè)月,2015年整個(gè)測(cè)試?yán)锍踢_(dá)到100萬英里,到2018年年底已經(jīng)達(dá)到了1000萬英里,這個(gè)期間他在2012年是在每鋼內(nèi)華達(dá)州獲得了測(cè)試許可,他的CEO非常保守,實(shí)際在接近1000萬英里測(cè)試條件下提出了保守和謹(jǐn)慎的態(tài)度。他為什么保守,為什么謹(jǐn)慎,看另外一組數(shù)據(jù)。
我這個(gè)車到底怎么安全才可以投入市場(chǎng),這里有一個(gè)假設(shè),假設(shè)按照10的六次方,100萬輛車,一天只運(yùn)行一個(gè)小時(shí),運(yùn)行3年的時(shí)間才可以出一次嚴(yán)重的事故,這樣算出的數(shù)據(jù)是10的9次方,第一個(gè)數(shù)據(jù)是現(xiàn)在全球汽車的總量差不多是15億輛,按照同樣的一天,三年里面每天運(yùn)行一小時(shí),10的9次方的1500倍。還有一個(gè)非常重要的數(shù)據(jù),我還是剛才的100萬輛車,假設(shè)它每個(gè)小時(shí)運(yùn)行的里程是20英里,對(duì)應(yīng)的里程就是2×10的4次方,如果我要證明在10的9次方里面是不會(huì)產(chǎn)生重大事故的話,我的里程數(shù)最少要這么長。
如果你考慮我們要進(jìn)行統(tǒng)計(jì)分析,多種車型,多次實(shí)驗(yàn),這個(gè)數(shù)據(jù)是不可想象的,而且要保證實(shí)驗(yàn)的過程中如何保證你所采取的場(chǎng)景能體現(xiàn)真實(shí)世界里面的,所包含的不是交通參與的要素,而是要包含所謂的能夠體現(xiàn)交通安全,交通風(fēng)險(xiǎn)的要素,而且要保證他們是彼此獨(dú)立的、隨即的,怎么實(shí)現(xiàn),這是非常基本的要去解決的問題,解決這樣的問題才能解決安全的標(biāo)準(zhǔn)。
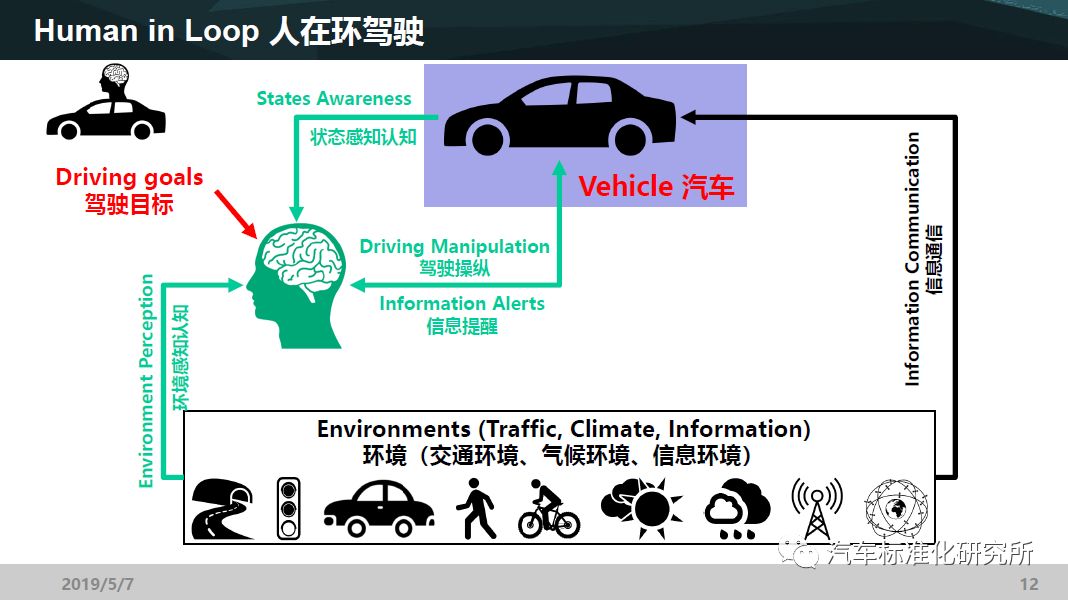
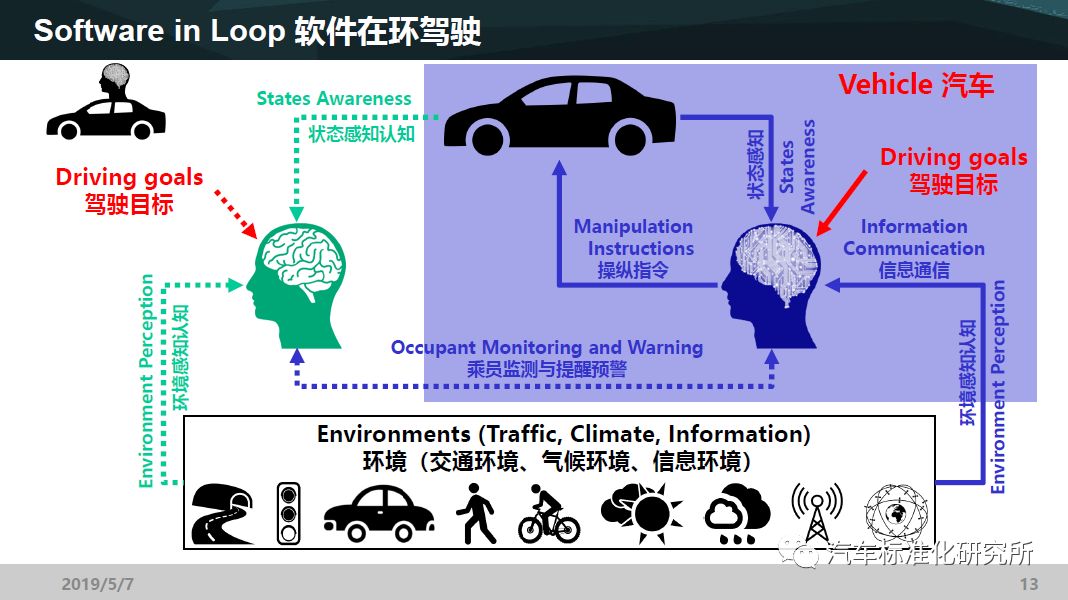
這個(gè)是把駕駛員開車的圖畫出來,人在開車的時(shí)候有兩個(gè)特征非常重要,第一個(gè)對(duì)交通要素,交通環(huán)境是選擇性注意,不是完全注意的,不是像攝像頭把所有信息全部采集下來,不斷的計(jì)算,在座的每一個(gè)開車人都有這種體驗(yàn),不會(huì)一直盯著這個(gè)路。第二個(gè)非常重要的,人是有學(xué)習(xí)能力的,這張圖如果是機(jī)器駕駛,軟件駕駛就是這張圖,左邊這個(gè)人也參與駕駛了,我們說共駕的狀態(tài),完全由軟件駕駛,如果按照語音管端的情況,我這個(gè)駕駛員可能不在車上,是在云端,是在基礎(chǔ)設(shè)施,這個(gè)時(shí)候就帶來了兩個(gè)問題,首先一個(gè)問題我測(cè)的這個(gè)車是不是像虛框畫的方位,甚至把基礎(chǔ)設(shè)施放在里面,車的內(nèi)涵擴(kuò)大,不再僅僅由汽車制造商負(fù)責(zé)。
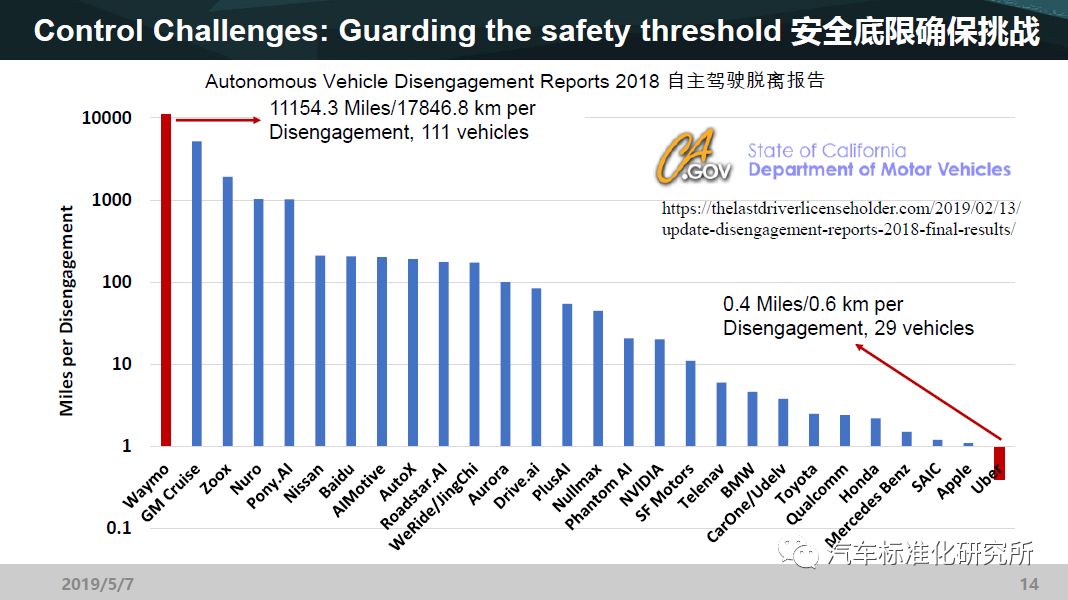
第二個(gè)問題就是安全保障問題,我們有人做駕駛員,不管怎么樣他是最終安全的保障者,或者是一個(gè)責(zé)任者。如果是機(jī)器駕駛怎么辦?2018年最新公布的自主駕駛測(cè)試脫離報(bào)告,所謂脫離報(bào)告就是必須要有人介入,不介入就會(huì)產(chǎn)生重大事故。超過1萬英里,大部分的車剛剛超過100英里,每100英里就要介入一次,大家可以想象這是多么危險(xiǎn)的一件事情。在這種情況下機(jī)器駕駛和人類駕駛怎么保障安全的底線。
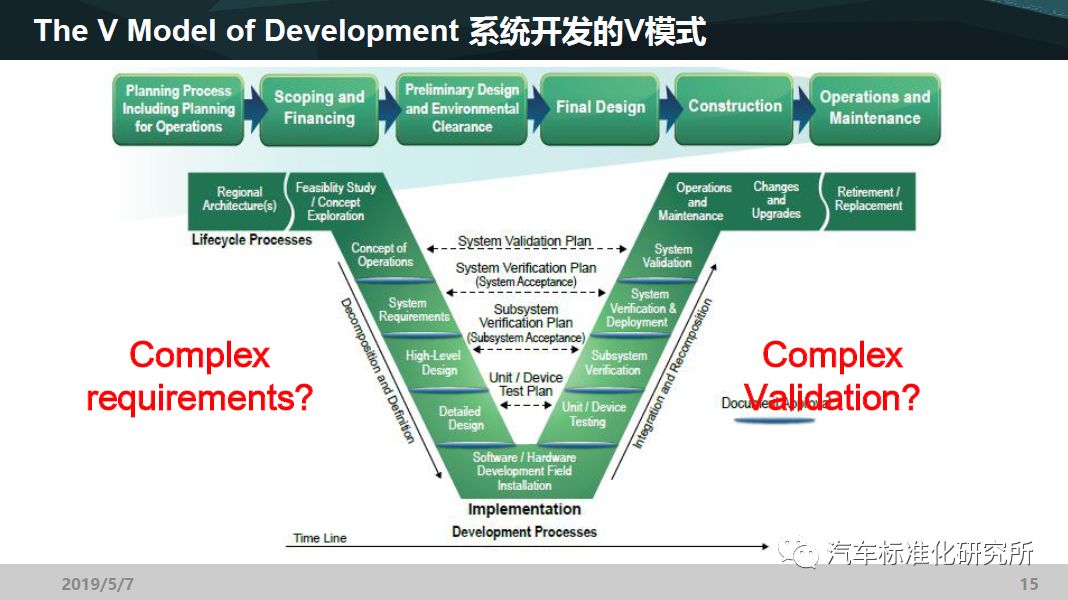
我們通常采用規(guī)模式的開發(fā),如果我們把這樣的規(guī)模式應(yīng)用到智能駕駛汽車的開發(fā),左邊必須要對(duì)它所有的要求進(jìn)行詳細(xì)的定義,上午很多專家提到了,有一些標(biāo)準(zhǔn)正在做,右邊就是如何進(jìn)行驗(yàn)證,都是非常復(fù)雜的。
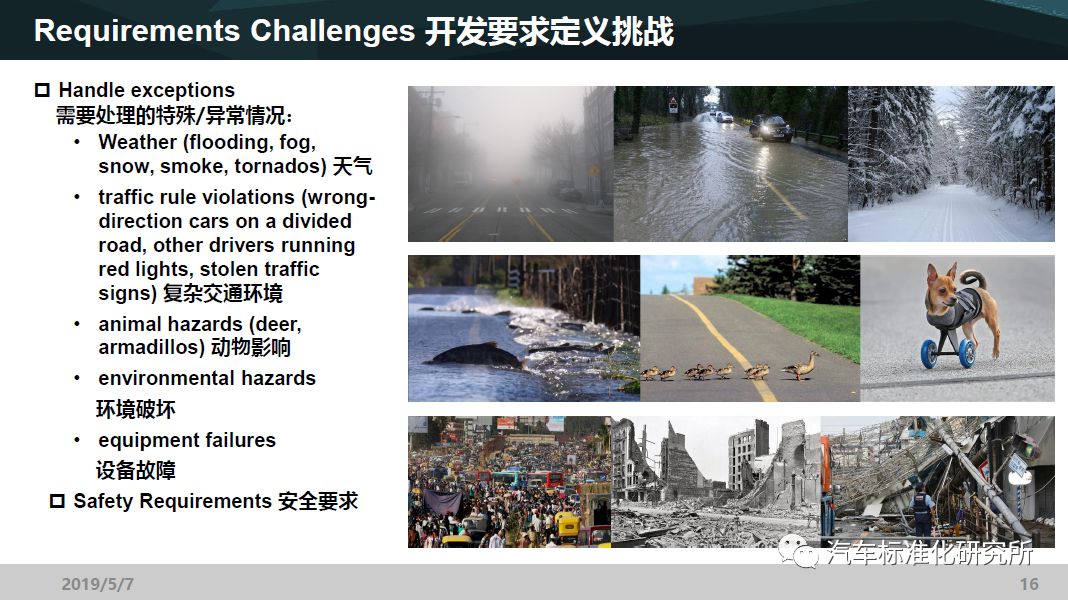
關(guān)于要求我就舉一個(gè)例子,比如上面第一行主要是特殊的天氣情況,我們很多車載的傳感器基本上都會(huì)失效,你很難獲得你想要的信息,第二行這塊,這些動(dòng)物你通過網(wǎng)聯(lián)的方法也沒有辦法實(shí)現(xiàn),因?yàn)樾」凡粫?huì)帶著手機(jī)在路上行走,鴨子也不會(huì)告訴你它要過馬路。第三行,我們現(xiàn)在說的云端方式,在重大災(zāi)害面前整個(gè)基礎(chǔ)設(shè)施都會(huì)發(fā)生破壞,在這樣的基礎(chǔ)上還要把邊界情況進(jìn)行組合,形成可操作的規(guī)范和要求,實(shí)際是非常困難的一件事情,這個(gè)是開發(fā)要求的挑戰(zhàn)。
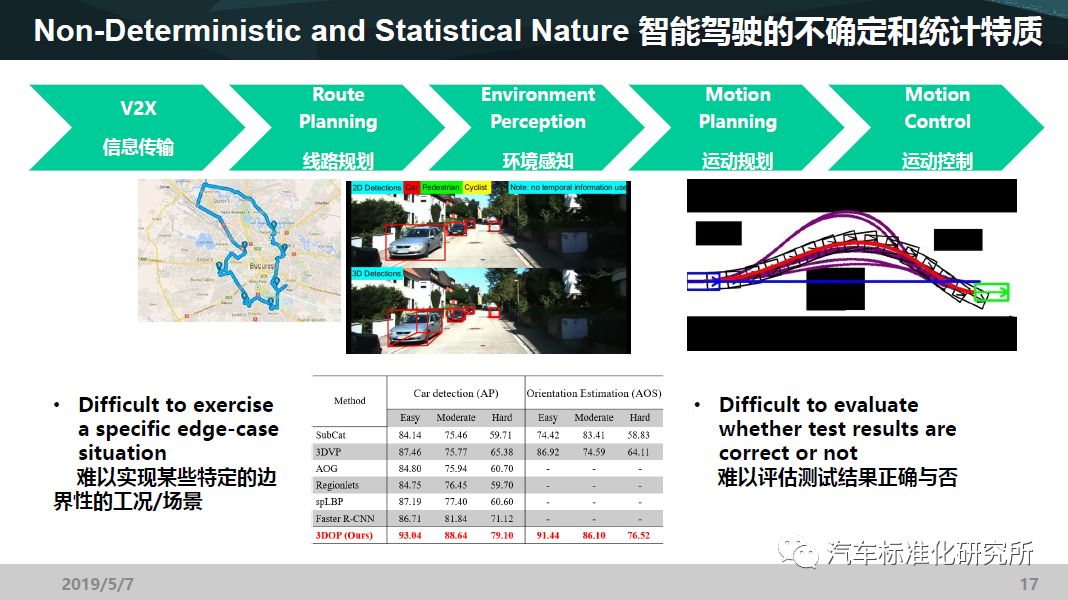
我們獲得的信息都有誤差,比如線路規(guī)劃的時(shí)候,我們經(jīng)常用導(dǎo)航軟件,過半分鐘去選,出來的結(jié)果都有區(qū)別,答案并不唯一,而且都是正確的,怎么辦?中間是利用視覺和毫米波雷達(dá)融合的方式進(jìn)行環(huán)境感知,這個(gè)是車輛檢測(cè)的情況,給出的只是正確率,我不知道是什么原因沒搞定,所以你去這個(gè)網(wǎng)站上會(huì)看到一大堆算法,算法彼此之間的關(guān)聯(lián)非常弱,你很難找到他們彼此進(jìn)化的過程,跟他們的原理有關(guān)系,包括后面的運(yùn)動(dòng)規(guī)劃,對(duì)于不確定性的系統(tǒng)和不決定性的結(jié)果,如何把安全邊界提取出來,如何判斷它的正確性,都是需要深入的思考。
-
互聯(lián)網(wǎng)
+關(guān)注
關(guān)注
54文章
11149瀏覽量
103246 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13787瀏覽量
166406
原文標(biāo)題:ICV 2019: 關(guān)于自動(dòng)駕駛汽車開發(fā)的思考:測(cè)試與評(píng)價(jià)
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
通用汽車調(diào)整自動(dòng)駕駛戰(zhàn)略,停止資助Cruise開發(fā)出租車
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
使用PVA引擎優(yōu)化自動(dòng)駕駛汽車CV開發(fā)流水線

自動(dòng)駕駛汽車安全嗎?

自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛汽車如何識(shí)別障礙物
自動(dòng)駕駛汽車傳感器有哪些
吉利與Foretellix合作開發(fā)自動(dòng)駕駛汽車
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
大眾汽車和Mobileye加強(qiáng)自動(dòng)駕駛合作
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)

自動(dòng)駕駛發(fā)展問題及解決方案淺析
Waymo自愿召回444輛自動(dòng)駕駛汽車 L4的自動(dòng)駕駛還有很多路要走






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論