 自動駕駛走向產業落地的必由之路
自動駕駛走向產業落地的必由之路
自動駕駛發展進程中,車端的智能化升級、路側的數字化改造、芯-路-云的深度協同是自動駕駛走向產業落地的必由之路。
——從SAE2019NEICV看自動駕駛產業落地途徑
自動駕駛發展進程中,車端的智能化升級、路側的數字化改造、芯-路-云的深度協同是自動駕駛走向產業落地的必由之路。
完成車端智能化升級,安全可靠的計算平臺方案、優化變革的電子電氣架構、回歸價值的座艙環境設計是三個關鍵的落地支撐。開展路側數字化改造,可為車輛補充具備上帝視角的全新感知維度、為監管機構提供優化交通運營的重要抓手。在此基礎上,實現車與車、車與路之間“芯-路-云”的深度協同,還依賴于前后端設備的智能網聯與后端系統的多云融合。
在日前召開的SAE2019新能源與智能網聯汽車技術大會(SAE 2019 NEICV)中,嘉溢創投和同濟校友產業創新聯盟作為大會特別支持方,深度參與到大會籌備和“芯-路-云”議題策劃中,也就智能網聯汽車的產業落地途徑貢獻了自己的思考。
單車智能遇瓶頸,車路協同引關注
在自動駕駛產業落地過往的進程中,國內外產業界之前更多依托其在汽車感知、決策、控制和執行方面的技術積累,推動單車智能的發展。然而,隨著人們越來越多地意識到單車智能在處理Corner Case、成本控制和可量產方面的局限,車路協同智能逐漸引起產業廣泛關注。
2018年,車路協同的提法躍入公眾視野,并逐漸成為一種V2X技術商業落地的重要途徑。V2X和自動駕駛是強相關的兩個技術體系,V2X可以在感知層面、甚至決策規劃層面從技術上幫助自動駕駛突破諸多現有障礙;隨著5G的分階段產業落地,通信網絡的可靠性提升、時延降低、帶寬提升、速率提升;在企業和監管機構的聯合推動下,車路協同有望在提升交通運行效率、提升汽車駕駛安全層面發揮重要作用。V2X 技術的商業化阻礙將變得越來越小。
車端智能化升級的關鍵支撐
完成車端智能化升級,安全可靠的計算平臺方案、優化變革的電子電氣架構、回歸價值的座艙環境設計是三個關鍵的落地支撐。
實現智能網聯汽車的自動駕駛,主體是智能的、網聯的汽車,未來包含智能網聯汽車的智能交通系統,一定是單個個體在限定區域具備較高智能水平的分布式智能系統,而非集中式智能系統。車端的智能化升級,是智能網聯汽車發展首要任務。十年來在Waymo為首的科技公司推動下,單車智能發展到了較高的水平,然而在感知、決策和執行層面仍存在較多瓶頸。如何在有限的時間、空間、資源和成本約束下,完成設計指標、實現軟件功能、交付安全可靠且便捷舒適的產品和服務,成為智能汽車落地量產最大的考量。
① 安全可靠的計算平臺方案是車端智能化升級產業落地的關鍵支撐。
在SAE 2019 NEICV上,來自英偉達(Nvidia)的自動駕駛業務高級經理朱力先生重點介紹了公司車載計算平臺。公司產品DIRVE AGXXaiver/Pegasus算力強大,可對車道線、標志、各類道路參與者進行實時的識別、分割、追蹤,感知效果強大;此外產品開發流程已經符合ISO26262的功能安全標準。
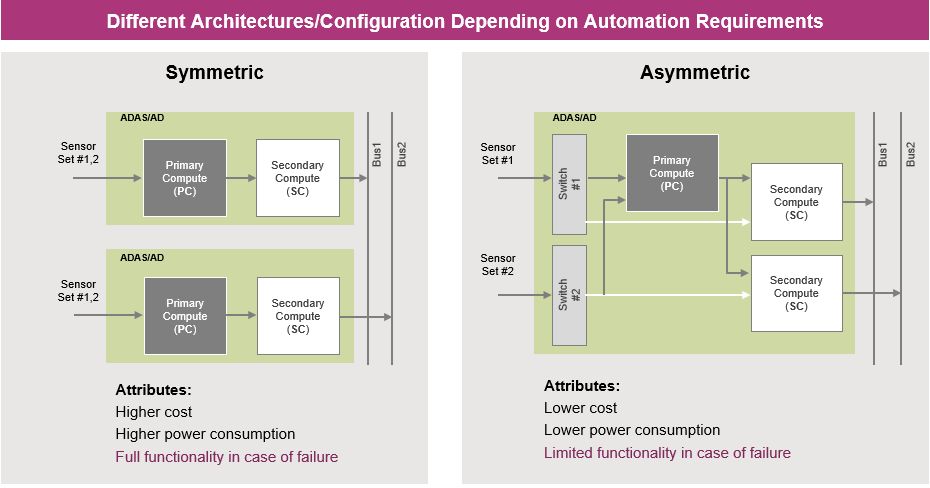
此外,來自英飛凌(Infineon)的高級項目經理Kevin Wu介紹了公司多款將于2022年量產的傳感器融合解決方案。英飛凌強調,在較低級別的輔助駕駛領域,汽車感知融合與計算系統仍可采用非對稱的失效保護架構(Fail-Operational Architectures);而到了L4/L5級別,對稱架構必不可少,保證即使在一套感知/計算系統失效的情況下,也能夠有一個緊急的冗余后備方案以最高的速度提供支持,才能真正保證系統安全可靠。
② 優化變革的電子電氣架構是車端智能得以走向量產的另一個關鍵要素。
來自安波福(Aptiv)的亞太地區汽車網聯與信息安全事業部總監倪志剛先生介紹了安波福最新的面向Zone的智能汽車電子電氣架構。該架構可以在5G環境下支持L3以上自動駕駛,以Zone為主干節點,提供更安全可靠的網絡架構,同時簡化整車電氣設計復雜度,降低綜合連接成本。
③ 回歸價值的座艙環境設計是智能汽車是否能被市場、被用戶接受的先決條件。
來自泛亞汽車的總工程師張健瓊女士分享了自己多年汽車座艙設計的方法論思考,她提出,智能座艙的核心價值依次是安全可靠、實用舒適、便捷服務。一切座艙布局、人機交互、座艙服務的設計均應該圍繞核心價值展開,智能化的技術應該在提升核心價值的效率的基礎上,再考慮額外的添磚加瓦。
路側數字化改造的落地實踐
開展路側數字化改造,可為車輛補充具備上帝視角的全新感知維度、為監管機構提供優化交通運營的重要抓手。
僅從單車智能的角度,實現L3以上的自動駕駛量產依然任重道遠。以路為核心的基礎設施數字化改造是加速智能網聯汽車產業落地的重要方面。
一方面,路側數字化改造可為車輛補充具備上帝視角的全新感知維度。目前的車端感知技術覆蓋的區域最遠為200-300米,且無法有效感知視界之外的區域。路側的數字化改造可輔助汽車的環境感知和定位,有效延伸汽車感知的維度和范圍,協助汽車開展路徑規劃。另一方面,路側數字化改造有助于對基礎設施開展主動控制與管理,在關鍵路段和特定場景輔助車輛編隊同行,提高道路交通運營效率。
長城汽車技術中心智能系統開發部主管張瀛博士從OEM的視角,分享了長城在自動駕駛車輛平臺和5G智能網聯示范區方面的研發、建設和落地工作。長城重視車端智能的發展,也發力智慧交通建設,將“人-車-路”一體的智能交通系統建設作為未來發展方向。
值得關注的是,高精地圖作為路側數字化的一種表現形式,已經在自動駕駛中得到廣泛應用,據晶眾地圖副總裁楊柯先生分享,晶眾作為最新一家獲得甲級測繪資質的高精地圖提供商,有能力快速低成本交付城市級高精地圖和停車場高精地圖,公司基于高精地圖在自動駕駛和自動代客泊車領域快速獲取市場、業務迅猛爆發。
實現車與車、車與路之間“芯-路-云”的深度協同,依賴于前后端設備的智能網聯與后端系統的多云融合。
①智能網聯是打通車載計算平臺、路側數字化設備、后臺云端系統的信息交互渠道,是車路協同走向落地的樞紐橋梁。
② 除了智能網聯,汽車、道路和管理運營不同環節的后端系統的云化和多云融合也是促進“芯-路-云”深度融合、自動駕駛產業落地的關鍵一環。
DaoCloud聯合創始人/CTO郭峰先生分享了公司基于人工智能云原生能力的汽車行業數字化實踐,DaoCloud可基于容器技術,為各行業客戶提供可組合、可移植、可擴展的算力支持,這對多云融合、自動駕駛衍生業務的快速部署至關重要。
在智能網聯分論壇“芯-路-云”板塊的最后,嘉溢創投合伙人盛雷先生策劃并主持了“芯-路-云,車路協同的產業落地途徑”專家論壇,就單車智能/車路協同自動駕駛技術路徑選擇、車路協同落地障礙、商業變現模式等開展了深度探討。
① 首先,關于單車/協同智能的技術路徑選擇,論壇嘉賓達成共識:要實現自動駕駛,基于智能網聯的車路協同必不可少。
英偉達朱力先生認為,車端傳感器的增加對于提高自動駕駛的性能的貢獻會慢慢趨于平緩,車路協同必然是未來的趨勢;英偉達作為芯片的提供商,產品會覆蓋車端和云端。
長城汽車張瀛博士以“長城汽車國家智能汽車與智慧交通(京冀)示范區”為例,展示了長城在車路協同領域的嘗試。
圖森未來副總經理薛健聰先生認為,在無人駕駛貨運領域,海外法規體系相對寬松,便于研發和測試的開展;而國內現階段法規嚴厲、市場主體尚不明確、行業標準尚未形成;然而近期監管姿態頻現利好、示范區建設卓有成效,一旦時機成熟,基于車端智能和V2X技術的自動駕駛有望在無人駕駛貨運領域率先實現大規模推廣應用。
蘇州工業園區交警大隊智能交通負責人束云峰隊長首先指出,在園區的智能交通示范區項目,和汽車與交通相關的各個產業參與方都參與其中。交警部門作為交通系統的監管機構,有天然的統籌各方協調調度的優勢,用交警部門作為智能交通項目的居中管理者,有助于推進智能交通項目試點的順利落地,也有利于項目走出試點、全面走向社會后與社會交通管理體系無縫銜接。
② 車路協同要順利落地,需要先克服哪些障礙呢?
同濟大學杜老師認為主要障礙在于監管政策,中移智行任總認為在于尚不明晰的商業模式,圖森薛總認為在于缺少足夠的長距離公路測試場景,長城王博認為主要障礙在于單車與網聯技術均未成熟。
③ 對于車路協同的商業模式,不同的參與方關注不同的價值變現環節。
英偉達聚焦于車端和云端計算平臺的銷售,長城關注新一代智能網聯汽車的銷售,圖森專注提供車隊無人貨運服務,杜老師關心特定場景如港區高速的貨車編隊自動駕駛以及固定高速路線虛擬軌道的超短車頭間距“車列”客運,中移智行則強調景區為代表的低速場景的率先落地。
盛雷先生在最后對專家們的寶貴觀點做了回顧。他總結道,圍繞芯-車-路-云的產業閉環和政-產-學-研-投的生態閉環開展的專家論壇,基本勾勒出了自動駕駛借助車路協同手段加速落地的演進方向和產業路徑。
在SAE 2019 NEICV,與會專家還就新能源汽車關鍵產業環節、汽車軟件操作系統、汽車信息安全及汽車測試與評價標準等諸多方面開展了深度探討。而在關鍵的智能網聯領域,一個廣泛的產業共識正在形成,那就是在自動駕駛發展進程中,車端智能與車路協同智能兩者均不可偏廢,車端的智能化升級、路側的數字化改造、芯-路-云的深度協同是自動駕駛走向產業落地的必由之路。
-
人工智能
+關注
關注
1791文章
47186瀏覽量
238267 -
自動駕駛
+關注
關注
784文章
13784瀏覽量
166399
原文標題:芯-路-云深度協同,自動駕駛走向產業落地的必由之路
文章出處:【微信號:SAEINTL,微信公眾號:SAE International】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
標貝科技:自動駕駛中的數據標注類別分享

標貝科技:自動駕駛中的數據標注類別分享

自動駕駛汽車安全嗎?



自動駕駛的未來之路:智能網聯與單車智能的交融
智能網聯是否是自動駕駛落地的必要條件?
FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
標貝數據采集標注在自動駕駛場景中落地應用實例

禾賽科技與Momenta簽署戰略合作,助力自動駕駛行業升級
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
文遠知行與聯想車計算戰略合作,推進自動駕駛商業化落地





 工商網監
工商網監
評論