 MIT利用粗粒度地圖實現自動駕駛
MIT利用粗粒度地圖實現自動駕駛
MIT最新研究能夠利用簡單的GPS地圖和視覺數據,模仿人類駕駛員的駕駛方式,將學到的知識應用于視障環境中的復雜計劃路線,該論文入圍ICRA2019最佳論文。
真正的人工智能不是只會機械處理數據,而是要能夠“智慧”地進行推理分析和決策。擁有人性化的推理能力,是自動駕駛汽車研發公司的長期追求。英特爾的Mobileye提出了一個數學模型RSS,能夠將人類的一些良好習慣比如給其他汽車讓路等編纂成體系,使自動駕駛汽車可以依靠“常識”來進行駕駛決策。而英偉達正在積極開發“安全力場”(Safety ForceField),這是一種行動計劃堆棧中的決策策略,依靠分析實時傳感器數據來監控不安全因素。
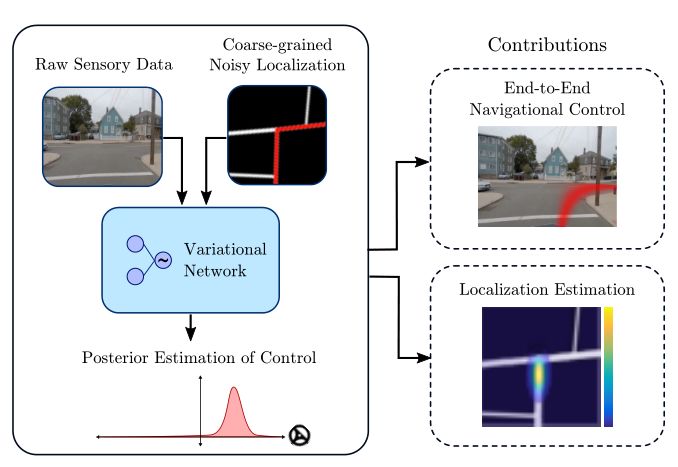
麻省理工學院的一個科學家團隊研究出一種方法——適應性端到端導航與定位(Variational End-to-End Navigation andLocalization),能夠利用簡單的GPS地圖和視覺數據,模仿人類駕駛員的駕駛方式,將學到的知識應用于視障環境中的復雜計劃路線。所謂的端到端,指的是該模型將定位、映射、物體檢測、運動規劃和轉向控制等多個傳統自動駕駛模塊融合在了一起,僅憑一個導航系統和配套算法處理所有輸入信息并輸出駕駛指令。他們這一工作成果發表于2019年蒙特利爾機器人與自動化國際會議(ICRA2019)的一篇論文中。
端到端模型
學習人類駕駛習慣
多年發展歷程已經證明了開發自動駕駛能力的任務是多么困難,并且揭示了機器智能與人類之間的巨大鴻溝——不僅在靈活計算能力上不如人類,在學習解決問題方面也是如此。例如,人們在奇怪、復雜的環境中駕駛很容易,只需要一個粗略的導航地圖和他們的眼睛就可以做到,而自動駕駛汽車即使在很熟悉的區域中也要依賴于非常復雜的傳感器隊列,依靠詳細的數據進行自我定位、環境定位、對象檢測、運動規劃和轉向控制。人類可以使用非常基本的信息應用于非常復雜的情況,需要的只是一張簡單的地圖,例如GPS地圖,并且可以將其與他們周圍的內容聯系起來,依據這些相關聯的信息知道自己的位置。根據具體情況,看似無關緊要的數據也可以被納入導航——就像有人可以從倫敦特拉法加廣場步行到利物浦街站,并在途中注意沿途的酒吧一樣。
這一系統與其他自動駕駛決策思路的另一區別在于,可以像人類一樣專注于尋找目的地而非專注于追隨某條道路。“我們的目標是實現強大的新環境下自動駕駛導航”,“例如,如果我們訓練一輛自動駕駛汽車在城市環境中駕駛,例如劍橋街道,那么該系統也應該能夠在樹林中順利駕駛,即使這是一個前所未有的環境。”
MIT研發團隊從以上人類駕駛習慣得到啟發,并讓汽車在駕駛過程中不斷學習新的駕駛習慣,以習得信息輔助駕駛決策。
視覺攝像頭
為了教授計算機人類駕駛員的知識,該團隊有一名人員駕駛普通的汽車,配備幾臺攝像機和一臺普通GPS收集有關郊區街道、道路結構和障礙物的數據。與依賴于非常復雜的機器推理和數據庫的傳統方法不同,MIT自動駕駛方法會從視覺線索中學習。
該系統從攝像頭中提取視覺信息,依靠該信息預測道路結構,比如遠處的停車標志和路邊的斷線等。然后將視覺數據與地圖數據進行關聯,識別兩者差異,例如,當汽車在一條不能轉彎的直線道路上行駛但地圖顯示右轉時,系統知道要一直向前行駛。
MIT表示,這種預測是基于一種被稱為卷積神經網絡(CNN)的機器學習模型,該模型通過處理人類駕駛員在訓練期間收集的圖像來學習如何駕駛。以T字路口為例,原則上說行駛在道路上的汽車可以轉向許多不同的方向,該模型會考慮所有方向,但隨著它看到有些人向左轉,有些人向右轉,但沒有人會直行,直行的這一方向就被排除在外,只能向左或向右移動。
MIT自動駕駛方法還允許汽車考慮其他視覺線索,如路標、道路線和其他標記,以確定它是什么樣的道路并預測什么時候會出現交叉口,以及特殊情況下如何駕駛。此外,它還可以分析街道情況,以確定不同街道的位置。通過其預測到的高概率內容與其看到的內容相匹配,再通過地圖顯示位置進行調整,如下圖。
粗粒度地圖
MIT方法使用的這種地圖是一種只有黑色背景和白色抽象道路線條、不包含任何路邊物體和標志的粗粒度地圖。
有了這個系統,不需要事先在每條道路上進行訓練。在一個新的道路環境中,只需要一張簡略的地圖,就可以自如地行駛。用激光雷達掃描得來的高精度地圖信息有4000GB,而通過這種方式整個地球的地圖信息存儲只需要40GB。
接下來,該系統研發團隊希望將其定位算法集成到整車離散道路地圖匹配的在線設置中,并提供比人類駕駛更加安全可靠的定位評估,優化細節,盡快實現完善的自動駕駛技術。
-
人工智能
+關注
關注
1791文章
47234瀏覽量
238351 -
自動駕駛
+關注
關注
784文章
13798瀏覽量
166418
原文標題:入圍 ICRA 2019 最佳論文:MIT利用粗粒度地圖實現自動駕駛
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
自動駕駛中常提的SLAM到底是個啥?

自動駕駛汽車安全嗎?


自動駕駛技術的典型應用 自動駕駛技術涉及到哪些技術

自動駕駛無圖方案真的可行嗎?
實現自動駕駛,唯有端到端?

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛汽車傳感器有哪些
自動駕駛仿真測試實踐:高精地圖仿真

特斯拉與百度合作掃清自動駕駛關鍵障礙
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
自動駕駛發展問題及解決方案淺析
自動駕駛地圖研究:SD pro MAP快速上車,助力城市NOA輕地圖智駕方案






 工商網監
工商網監
評論