 車輛自主定位技術
車輛自主定位技術
對于未來的車輛來說,確定自身在車道內的位置是基礎。因此定位和地圖構建,成為了一個基礎而重要的環節,對于自動駕駛的核心控制系統而言,需要利用感知傳感器觀察環境,同時根據感知信號對環境的地圖構建和自身進行定位。而面向自動駕駛的精確控制,定位技術需要的是厘米級定位,確切地知道車輛的位置。根據自動駕駛系統所對應的不同,大致可以分為:
基于地標:根據視覺或者激光雷達的定位,與數據庫中的特征匹配,確定車輛本體的位置和環境。
基于信號定位:采用外界的位置信號,如衛星系統(GNSS)和5G;
基于慣性導航技術:在了解車輛的位置后,計算車輛的當前位置和方向。航位推算的本質是在初始位置上累加位移矢量計算當前位置,它是一個信息累加的過程。
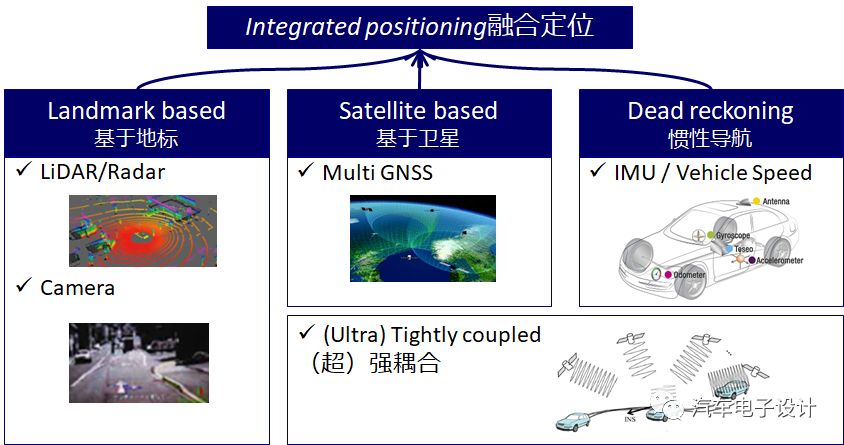
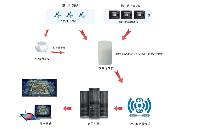
圖1 融合定位技術
在當前的使用的三種定位技術中,通過組合使用效果,比較典型的為 1)基于差分GPS 和慣性傳感器融合;
2)基于LiDAR 點云與高精地圖的匹配;
3)基于視覺的道路特征識別。其中第一種基于差分GPS+慣性導航的融合,是最為常規的定位方法,用在車輛導航里面。單憑 GPS,在無法接收GPS數據或者接收狀態惡劣的條件下,就無法判別車輛的確切位置,而且需要考慮其可靠性。慣性傳感器是檢測加速度與旋轉運動的高頻(1KHz)傳感器,對慣性傳感器數據進行處理后我們可以實時得出車輛的位移與轉動信息。6自由度對應的慣性測量單元是不受氣象條件、附近其他車輛、車速等影響。在這個里面,通過慣導進行朝向修正,可以在車輛低速行進時提供準確的朝向信息。如下圖所示
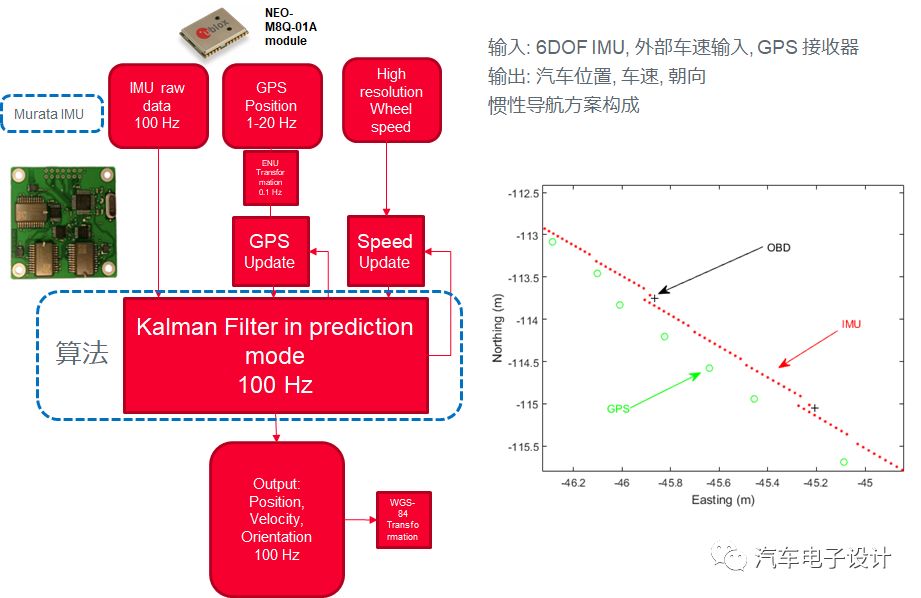
在技術發展中,傳感器被封裝成芯片解決方案,以村田的SCC2000為例,可在ECU內實現6個自由度的解決方案。具有穩定的偏置特性、低噪音、高耐振動性和寬溫度(-40-125度),在高精度、高可靠性的自動駕駛高精度定位應用中,如果要實現高可靠性和性能,此類芯片是不可或缺的。
使用慣導、輪速和GPS信號是可以進行組合的。而通過使用基于卡爾曼濾波的傳感器融合技術,我們可以融合GPS與慣性傳感器數據,各取所長,以達到較好的定位效果。
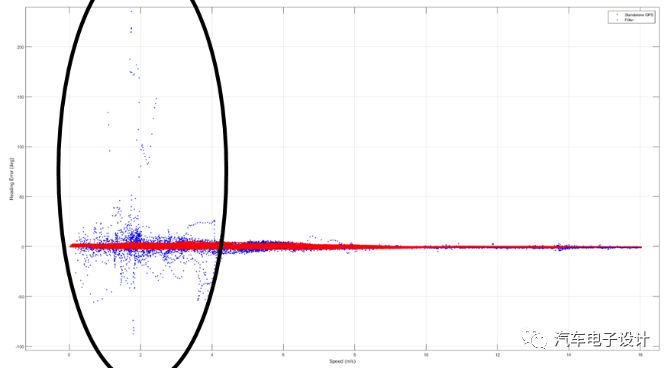
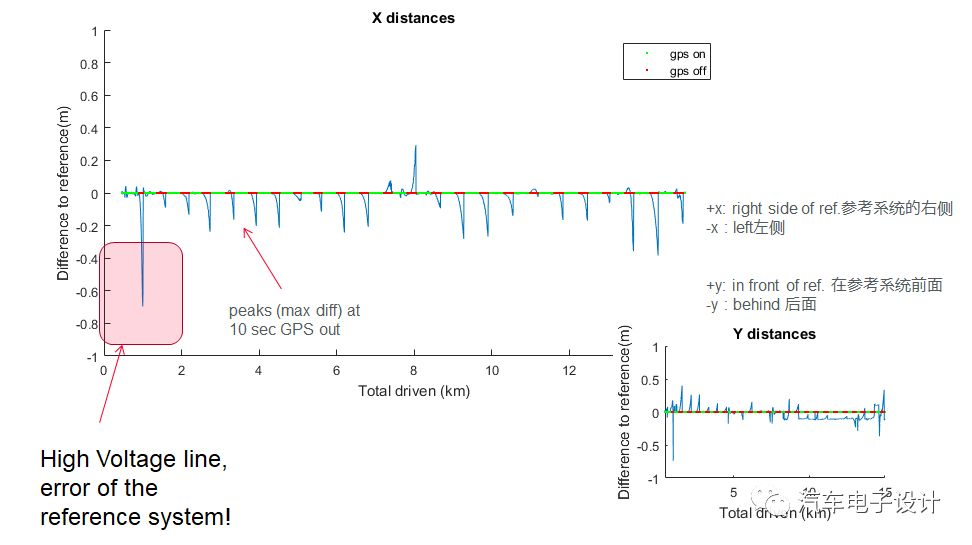
圖3 GNSS在低速情況時的挑戰
1)在自動駕駛中,則考慮的定位方式是GPS+IMU+高精度地圖+激光雷達信息融合的定位方法。利用車輛之前介紹的GPS結合IMU做出大概位置判斷后,使用高精度地圖與激光雷達SLAM云點圖像與之對比,在一個坐標系內做配準,通過配對后確認自車位置,這是目前最成熟,準確度最高的方法。
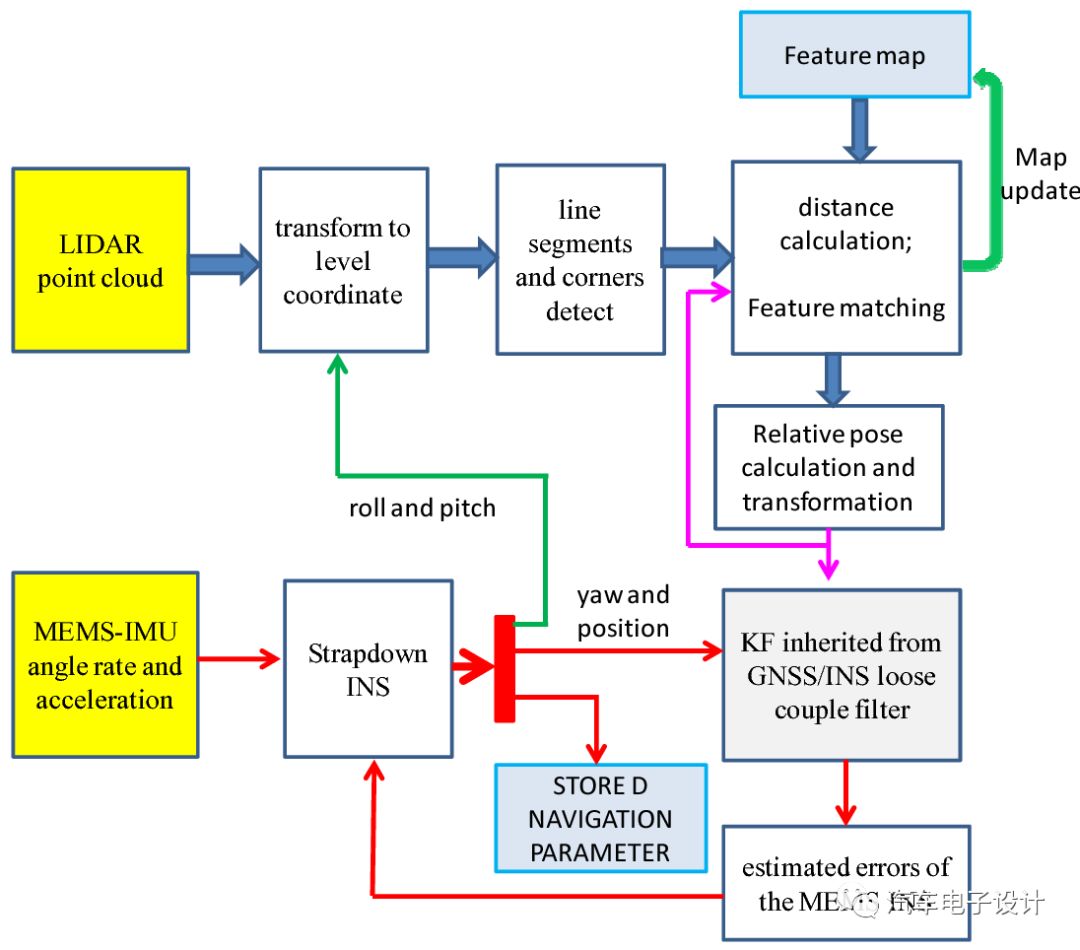
圖 4 激光雷達和慣導整合
2)在不用激光雷達的時候,也可以采用GPS+IMU+視覺定位的方法,由于攝像頭信息依賴于本身的特性,所以也需要使用管道來輔助攝像頭姿勢識別,結合慣性傳感器和GPS/視覺傳感器可以為行駛在道路上的汽車精確定位。
備注:視覺坐標系與慣導坐標系的融合系統,兩個數據通常是不同步的(耦合方式的不同,是考慮是否把視覺和慣導的數據融合在一個優化的濾波器內)。在系統中選用不同的視覺傳感器,單目一般采取緊耦合,而雙目則采用松耦合。單目攝像頭借助IMU 來實現絕對尺度的估計。雙目立體視覺可通過左右圖像匹配來恢復特征點的三維坐標。
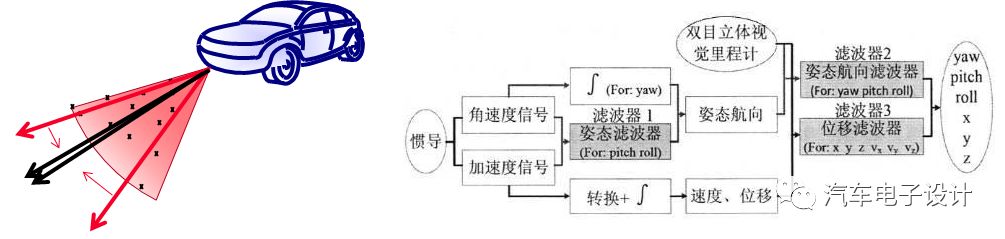
圖5 視覺和慣導的整合
小結:目前在自動駕駛里面,慣導的使用是基本的一環。感知技術和定位技術相輔相成,在邊界條件下,提供定位的準確性、可靠性,提高算法的準確性和及時性是技術發展完善的必然要求,我們未來會看到越來越完善的方案。
-
gps
+關注
關注
22文章
2895瀏覽量
166203 -
自動駕駛
+關注
關注
784文章
13794瀏覽量
166413
原文標題:車輛自主定位技術
文章出處:【微信號:QCDZSJ,微信公眾號:汽車電子設計】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
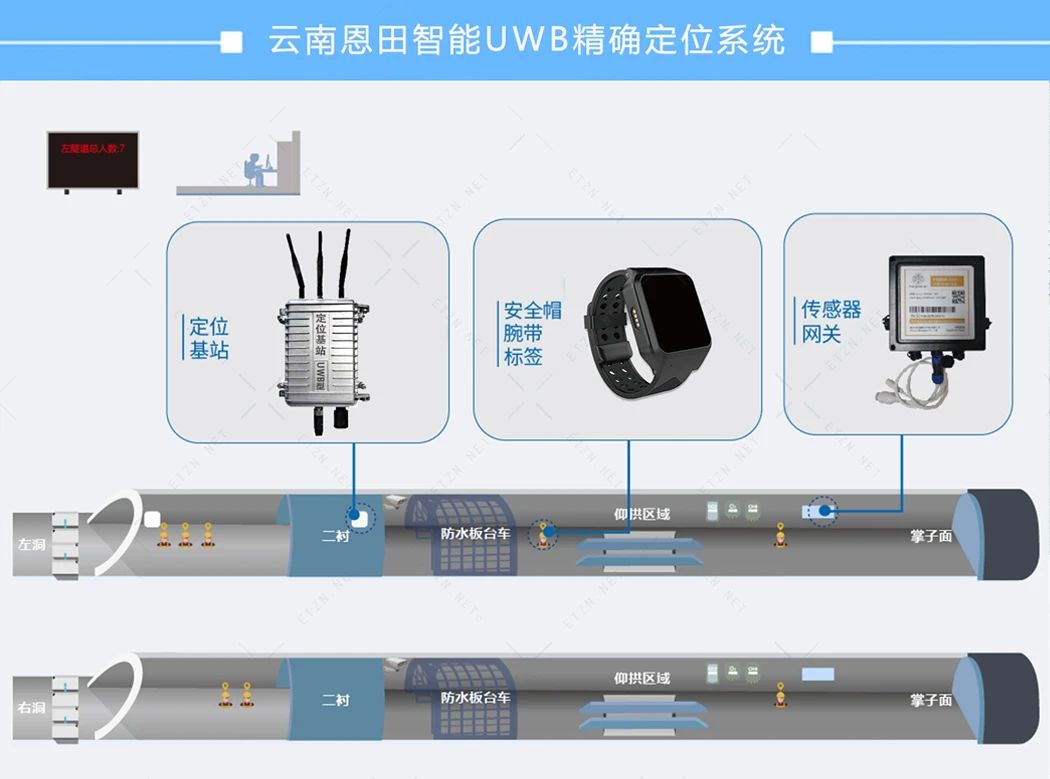
與其他隧道定位系統相比,云南恩田隧道定位系統性價比有獨特之處
如何部署北斗定位應用,基于國產自主架構LS2K1000LA-i處理器平臺
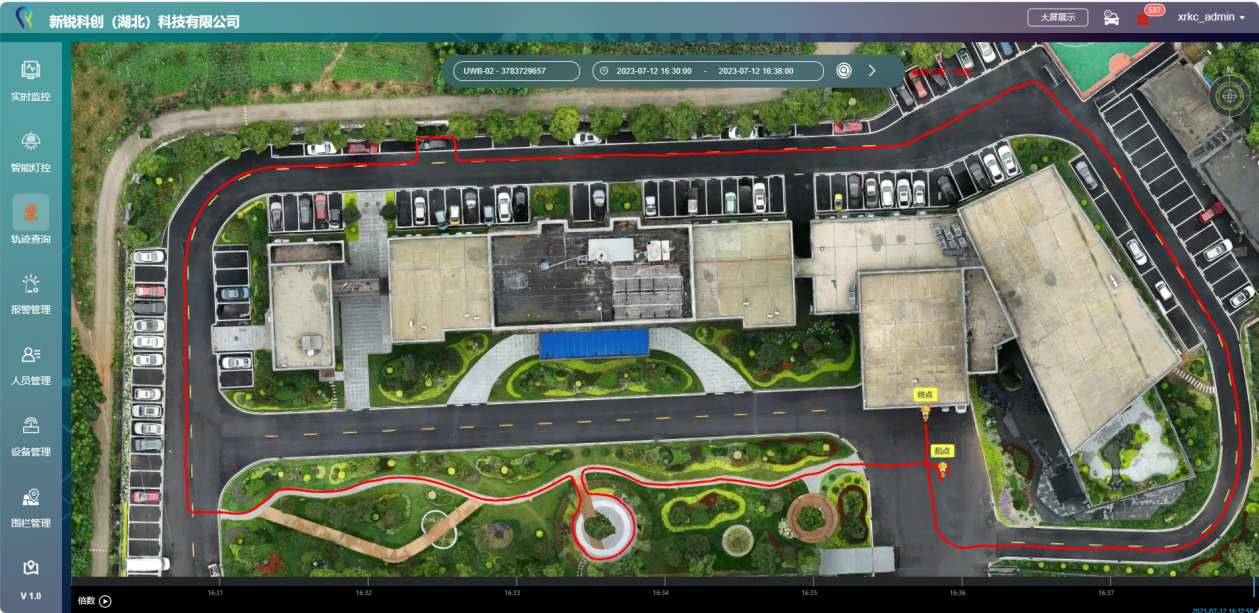
園區封閉化管理之人員和車輛定位及軌跡追蹤
UTB定位技術能不能精準定位
化工廠人員定位采用多種定位技術的融合定位系統的好處

智慧工廠人員定位管理系統源碼,采用UWB定位技術,實現對工廠內的人、車、物、料等的實時定位、智能調配
藍牙+LoRa+北斗RTK融合定位系統介紹
車輛調度系統

智慧車輛監管:4G/5G、定位技術與智能監控的完美結合
工程車輛車載PLC+GPS定位物聯網系統解決方案
隧道施工人員車輛定位系統創新解決方案






 工商網監
工商網監
評論