") 視覺導(dǎo)航定位系統(tǒng)的系統(tǒng)基本組成與工作原理
視覺導(dǎo)航定位系統(tǒng)的系統(tǒng)基本組成與工作原理
機(jī)器人研究的核心就是:導(dǎo)航定位、路徑規(guī)劃、避障、多傳感器融合。定位技術(shù)有幾種,不關(guān)心,只關(guān)心視覺的。視覺技術(shù)用到“眼睛”可以分為:單目,雙目,多目、RGB-D,后三種可以使圖像有深度,這些眼睛亦可稱為VO(視覺里程計:單目or立體),維基百科給出的介紹:在機(jī)器人和計算機(jī)視覺問題中,視覺里程計就是一個通過分析處理相關(guān)圖像序列來確定機(jī)器人的位置和姿態(tài)。
當(dāng)今,由于數(shù)字圖像處理和計算機(jī)視覺技術(shù)的迅速發(fā)展,越來越多的研究者采用攝像機(jī)作為全自主用移動機(jī)器人的感知傳感器。這主要是因?yàn)樵瓉淼某暬?a href="http://www.1cnz.cn/tags/紅外/" target="_blank">紅外傳感器感知信息量有限,魯棒性差,而視覺系統(tǒng)則可以彌補(bǔ)這些缺點(diǎn)。而現(xiàn)實(shí)世界是三維的,而投射于攝像鏡頭(CCD/CMOS)上的圖像則是二維的,視覺處理的最終目的就是要從感知到的二維圖像中提取有關(guān)的三維世界信息。
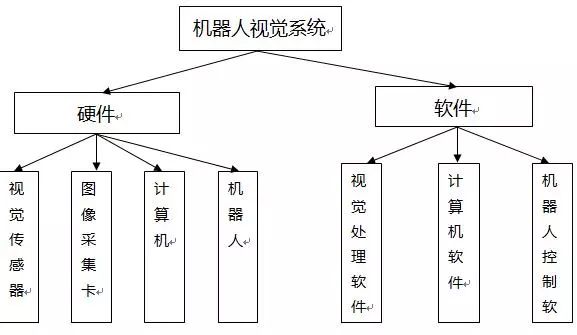
系統(tǒng)基本組成:CCD、PCI、PC及其外設(shè)等。
CCD/CMOS
一行硅成像元素,在一個襯底上配置光敏元件和電荷轉(zhuǎn)移器件,通過電荷的依次轉(zhuǎn)移,將多個象素的視頻信號分時、順序地取出來,如面陣CCD傳感器采集的圖像的分辨率可以從32×32到1024×1024像素等。
視頻數(shù)字信號處理器
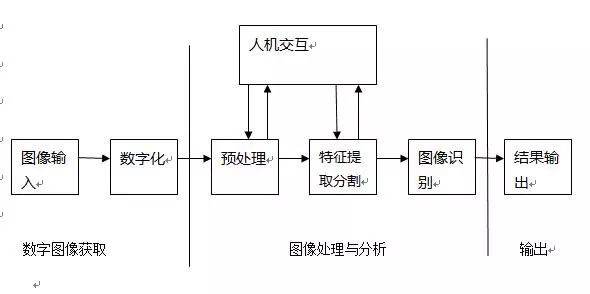
圖像信號一般是二維信號,一幅圖像通常由512×512個像素組成(當(dāng)然有時也有256×256,或者1024×1024個像素),每個像素有256級灰度,或者是3×8bit,紅黃蘭16M種顏色,一幅圖像就有256KB或者768KB(對于彩色)個數(shù)據(jù)。為了完成視覺處理的傳感、預(yù)處理、分割、描述、識別和解釋,上述前幾項(xiàng)主要完成的數(shù)學(xué)運(yùn)算可歸納為:
(1)點(diǎn)處理常用于對比度增強(qiáng)、密度非線性較正、閾值處理、偽彩色處理等。每個像素的輸入數(shù)據(jù)經(jīng)過一定關(guān)系映射成像素的輸出數(shù)據(jù),例如對數(shù)變換可實(shí)現(xiàn)暗區(qū)對比度擴(kuò)張。
(2)二維卷積的運(yùn)算常用于圖像平滑、尖銳化、輪廓增強(qiáng)、空間濾波、標(biāo)準(zhǔn)模板匹配計算等。若用M×M卷積核矩陣對整幅圖像進(jìn)行卷積時,要得到每個像素的輸出結(jié)果就需要作M2次乘法和(M2-1)次加法,由于圖像像素一般很多,即使用較小的卷積和,也需要進(jìn)行大量的乘加運(yùn)算和訪問存儲器。
(3)二維正交變換常用二維正交變換有FFT、Walsh、Haar和K-L變換等,常用于圖像增強(qiáng)、復(fù)原、二維濾波、數(shù)據(jù)壓縮等。
(4)坐標(biāo)變換常用于圖像的放大縮小、旋轉(zhuǎn)、移動、配準(zhǔn)、幾何校正和由攝影值重建圖像等。
(5)統(tǒng)計量計算如計算密度直方圖分布、平均值和協(xié)方差矩陣等。在進(jìn)行直方圖均衡器化、面積計算、分類和K-L變換時,常常要進(jìn)行這些統(tǒng)計量計算。
視覺導(dǎo)航定位系統(tǒng)的工作原理
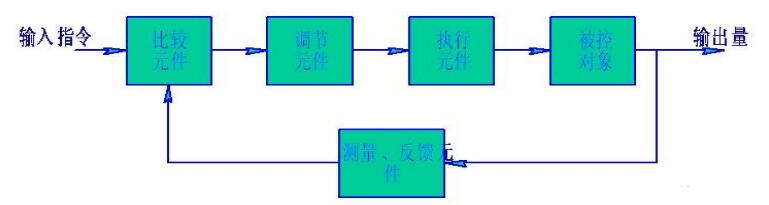
簡單說來就是對機(jī)器人周邊的環(huán)境進(jìn)行光學(xué)處理,先用攝像頭進(jìn)行圖像信息采集,將采集的信息進(jìn)行壓縮,然后將它反饋到一個由神經(jīng)網(wǎng)絡(luò)和統(tǒng)計學(xué)方法構(gòu)成的學(xué)習(xí)子系統(tǒng),再由學(xué)習(xí)子系統(tǒng)將采集到的圖像信息和機(jī)器人的實(shí)際位置聯(lián)系起來,完成機(jī)器人的自主導(dǎo)航定位功能。
1)攝像頭標(biāo)定算法:2D-3D映射求參。
傳統(tǒng)攝像機(jī)標(biāo)定主要有 Faugeras 標(biāo)定法、Tscai 兩步法、直接線性變換方法、張正友平面標(biāo)定法和 Weng迭代法。自標(biāo)定包括基于 Kruppa 方程自標(biāo)定法、分層逐步自標(biāo)定法、基于絕對二次曲面的自標(biāo)定法和 Pollefeys 的模約束法。視覺標(biāo)定有馬頌德的三正交平移法、李華的平面正交標(biāo)定法和 Hartley 旋轉(zhuǎn)求內(nèi)參數(shù)標(biāo)定法。
2)機(jī)器視覺與圖像處理:
a.預(yù)處理:灰化、降噪、濾波、二值化、邊緣檢測。。。
b.特征提取:特征空間到參數(shù)空間映射。算法有HOUGH、SIFT、SURF。
c.圖像分割:RGB-HIS。
d.圖像描述識別
3)定位算法:基于濾波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。
也可以使用單目視覺和里程計融合的方法。以里程計讀數(shù)作為輔助信息,利用三角法計算特征點(diǎn)在當(dāng)前機(jī)器人坐標(biāo)系中的坐標(biāo)位置,這里的三維坐標(biāo)計算需要在延遲一個時間步的基礎(chǔ)上進(jìn)行。根據(jù)特征點(diǎn)在當(dāng)前攝像頭坐標(biāo)系中的三維坐標(biāo)以及它在地圖中的世界坐標(biāo),來估計攝像頭在世界坐標(biāo)系中的位姿。這種降低了傳感器成本,消除了里程計的累積誤差,使得定位的結(jié)果更加精確。此外,相對于立體視覺中攝像機(jī)間的標(biāo)定,這種方法只需對攝像機(jī)內(nèi)參數(shù)進(jìn)行標(biāo)定,提高了系統(tǒng)的效率。
定位算法基本過程:
簡單的算法過程,可基于OpenCV進(jìn)行簡單實(shí)現(xiàn)。
輸入
通過攝像頭獲取的視頻流(主要為灰度圖像,stereo VO中圖像既可以是彩色的,也可以是灰度的 ),記錄攝像頭在t和t+1時刻獲得的圖像為It和It+1,相機(jī)的內(nèi)參,通過相機(jī)標(biāo)定獲得,可以通過matlab或者opencv計算為固定量。
輸出
計算每一幀相機(jī)的位置+姿態(tài)
基本過程
●獲得圖像It,It+1
●對獲得圖像進(jìn)行畸變處理
●通過FAST算法對圖像It進(jìn)行特征檢測,通過KLT算法跟蹤這些特征到圖像It+1中,如果跟蹤特征有所丟失,特征數(shù)小于某個閾值,則重新進(jìn)行特征檢測
●通過帶RANSAC的5點(diǎn)算法來估計兩幅圖像的本質(zhì)矩陣
●通過計算的本質(zhì)矩陣進(jìn)行估計R,t
●對尺度信息進(jìn)行估計,最終確定旋轉(zhuǎn)矩陣和平移向量
-
定位系統(tǒng)
+關(guān)注
關(guān)注
10文章
592瀏覽量
36616 -
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4440瀏覽量
121162
原文標(biāo)題:機(jī)器人視覺系統(tǒng)組成及定位算法(難得的好資料)
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
貼片機(jī)視覺系統(tǒng)的基本組成
機(jī)器人視覺系統(tǒng)組成及定位算法分析
GPS定位系統(tǒng)的組成
計算機(jī)的基本組成及工作原理
計算機(jī)的基本組成和工作原理是什么
機(jī)器視覺系統(tǒng)的工作原理是什么?有哪些應(yīng)用實(shí)例?
DS1302 的基本組成和工作原理
伺服系統(tǒng)包含哪些(基本組成_工作原理_應(yīng)用)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論