

以前提過單目測距的問題,檢測的障礙物2-D框加上攝像頭的姿態和路面假設。以下根據公開發布的論文討論具體的算法:
注:深度學習直接估計深度圖不屬于這個議題。
1。Vision-based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy
著名的Mobileye論文,先看成像幾何如圖:
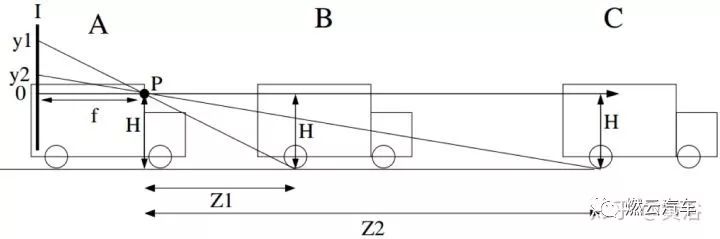
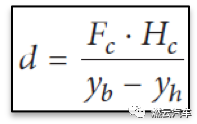
本車A,前方車B和C,攝像頭P焦距f,高度H,和障礙物B/C距離Z1/Z2,B/C檢測框著地點在圖像的投影是y1/y2。那么y=fH/Z,所以Z=fH/y。下面是三個不同距離的估計結果:
精度測量得到:90米誤差大約10%, 44米誤差約為5%。
2。Integrated Vehicle and Lane Detection with Distance Estimation
算法流程如下:
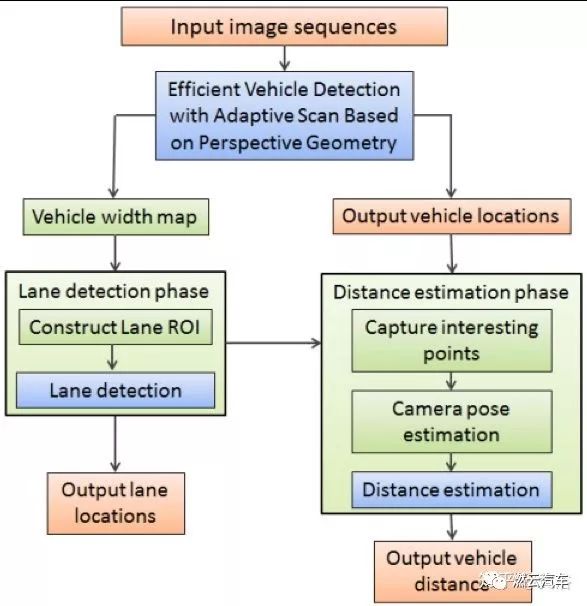
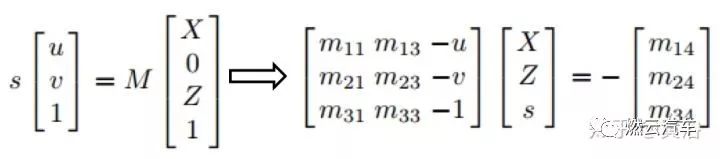
先是從3個消失點估算攝像頭焦距,然后6個2D-3D對應點得到攝像頭姿態:
基于車道寬度的假設(3.75米),可以算出投影矩陣,隨之得到距離公式:
下圖是一些結果:
3。Use of a Monocular Camera to Analyze a Ground Vehicle’s Lateral Movements for Reliable Autonomous City Driving
還是基于消失點原理,加上水平線,可得到道路場景幾何關系。
消失點和pitch angle的關系:

從消失點得到pitch angle:

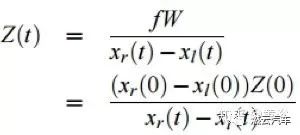
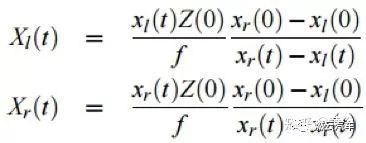
4。Range Estimation with a Monocular Camera for Vision-Based Forward Collision Warning System
如果車輛寬度已知,那么車距為d=FW/w。
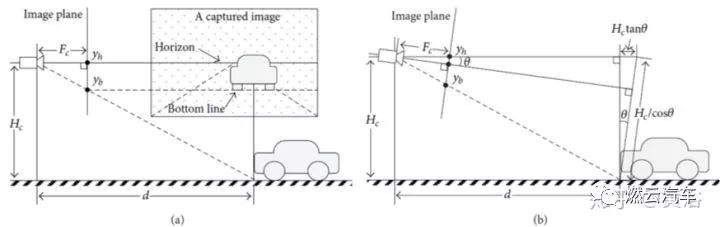
如上圖,可以計算距離為:
整個FCW系統流程圖如下:
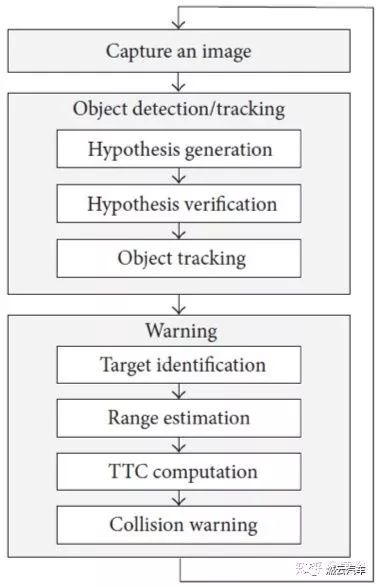
給了一個虛擬水平線的概念,估計它的位置
5。Robust Vehicle Detection and Distance Estimation Under Challenging Lighting Conditions
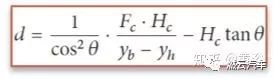
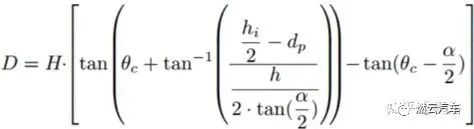
碰撞報警需要估算安全距離。下圖幾何關系能給出估計距離的公式:
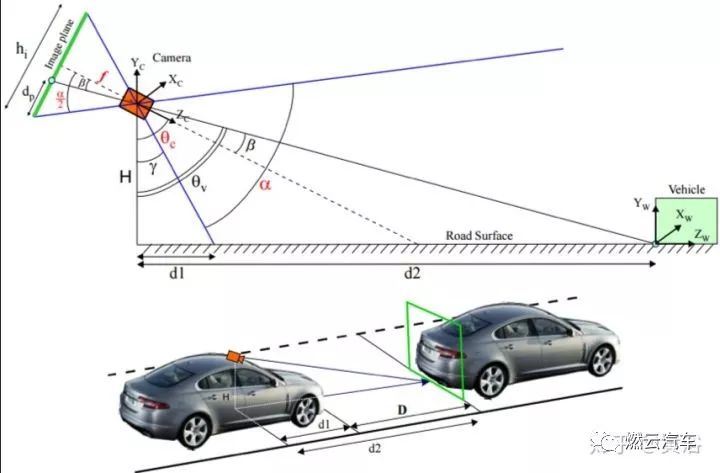
距離公式為
下圖是IPM的鳥瞰圖展示距離:
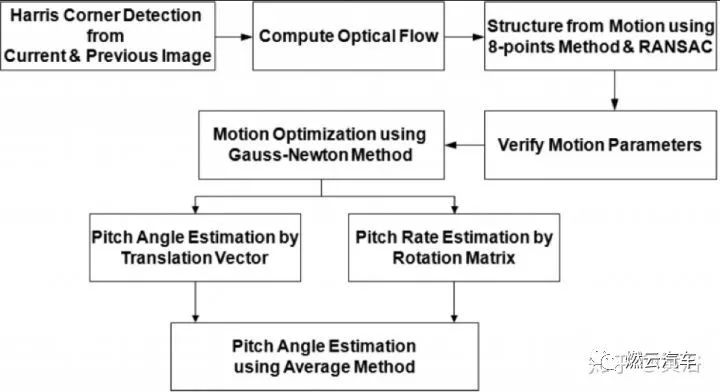
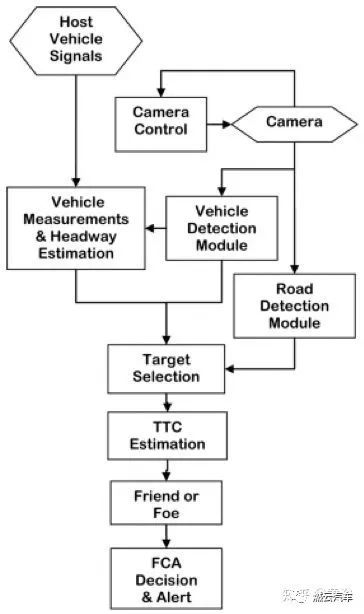
6。Pitch Angle Estimation Using a Vehicle Mounted Monocular Camera for Vehicle Target Range Measurement
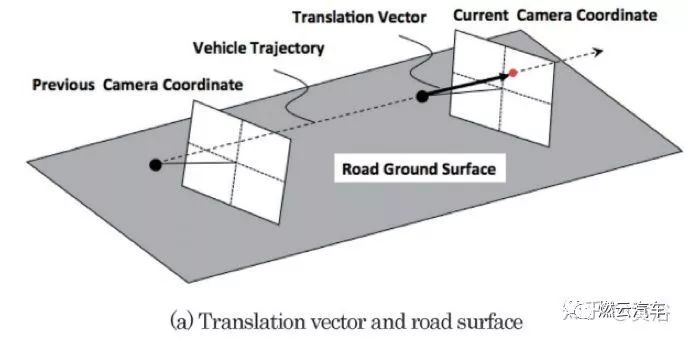
計算特征點運動,由此得到自身攝像頭運動,從其平移向量推出pitch angle。
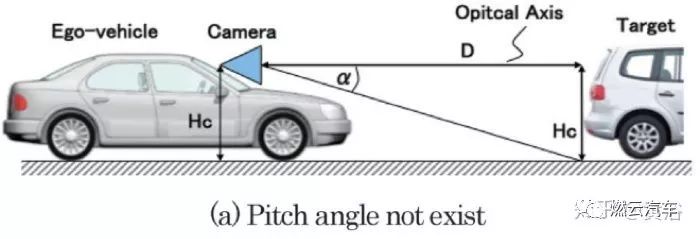
上圖可以計算出前方車的距離:
整個系統流程圖如下:
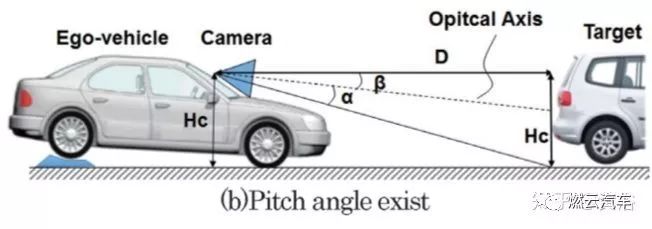
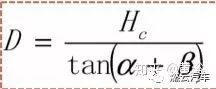
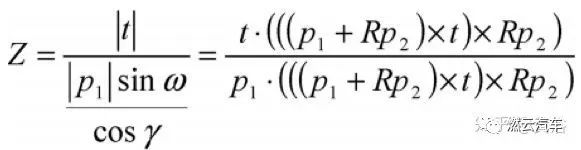
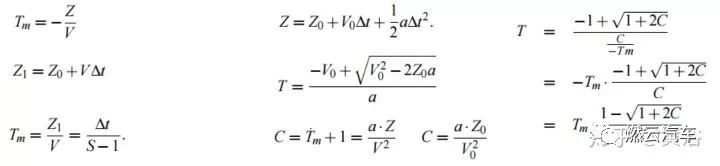
下面就是從SFM的幾何關系推理距離:
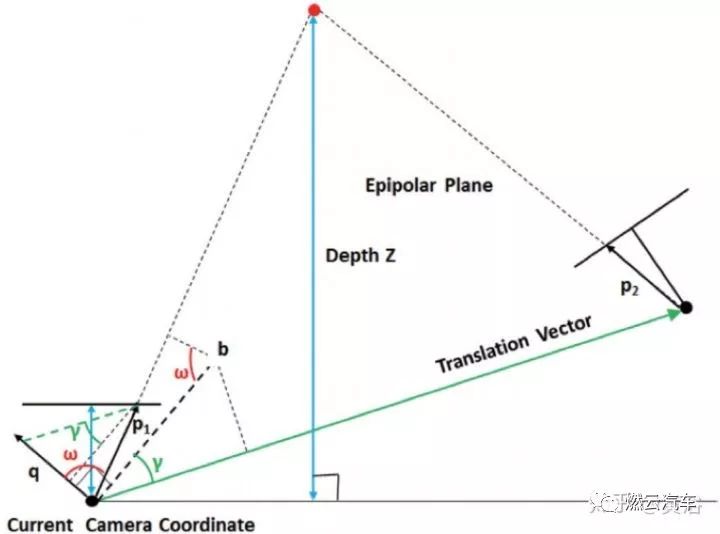
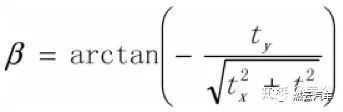
看下面的關系可以得到pitch angle:
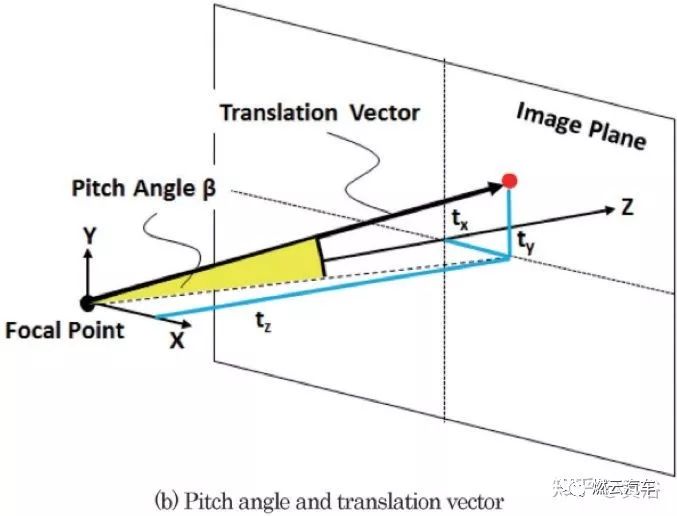
角度計算公式為
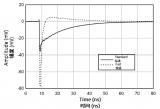
7。Forward Collision Warning with a Single Camera
time to contact (TTC) 直接從車輛的大小和位置得到,下面是流程圖:
計算公式:
車邊框的位置以及光流大小可以確定碰撞的可能性:
這里主要是通過簡單的幾何關系,直接估算檢測的路上車輛距離并給出可能的撞擊時間。現在深度學習越來越強大,理論上得到車檢測邊框的同時,也可以回歸車的距離。
-
攝像頭
+關注
關注
61文章
4949瀏覽量
97658 -
機器視覺
+關注
關注
163文章
4509瀏覽量
122247
原文標題:單鏡頭視覺系統檢測車輛的測距方法
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
康耐視全新發布In-Sight 8900視覺系統
使用Lattice mVision打造嵌入式視覺系統解決方案
海伯森亮相VisionCon合肥視覺系統技術設計會議

雙模駐波式超聲波鏡頭清洗技術:為自動駕駛汽車視覺系統提供清晰視野

安森美機器視覺系統解決方案

機器視覺系統用途與實現及市場趨勢
機器視覺系統如何選擇圖像傳感器
零件文字標簽機器視覺檢測有無





 工商網監
工商網監

評論