") 加州大學伯克利分校的團隊給予跳躍機器人更高目標
加州大學伯克利分校的團隊給予跳躍機器人更高目標
美國加州大學伯克利分校的研究人員,研發(fā)出一款能不斷跳躍的機器人:Salto-1P。
該研究成果Salto-1P模仿的是非洲嬰猴,一種喜歡彈跳的靈長目動物,可以輕松跳高超2米。Salto-1P有一對推進器,使它跳得更快、更高、更遠。它還可以在空中控制方向,準確落在目標地點。未來,跳躍機器人有望被應用在特殊環(huán)境中的搜尋、探索等任務。
“Salto-1P飛行階段控制的精確跳躍限制”是一篇論文的學術聲稱,應該讓那些對機器人運動感興趣的人感到高興。該論文的作者Justin Yim和加州大學伯克利分校電子工程與計算機科學系的Ronald Fearing。他們的工作于本月早些時候在馬德里的IROS 2018展會上展出。
這是一種名為Salto-1P的單機器人。Salto-1P作為一種能夠連續(xù)高功率跳躍的小型單跳跳躍機器人。他們?yōu)槭裁捶Q它為Salto?New Atlas的 James Holloway 滿足了這種好奇心。地形障礙的鹽化運動是答案,無論“鹽化”意味著什么。Holloway和Google也幫助了那里。
Saltatorial意味著適應跳躍。Saltus是拉丁語中的一個拉丁語。
實際上,看著一個單腿機器人在一場不停的狂熱中跳來跳去,這讓人感到奇怪。然而,加州大學伯克利分校的研究人員考慮了更多有針對性的運動。該團隊已著手提供一個可以進行跳躍的機器人,以便能夠確定下一次落地的位置。
“兩個小螺旋槳允許機器人在半空中扭轉,但所有動力都來自單腿,” Hackaday說。
人們可以理解IEEE Spectrum選擇將其稱為“機器人彈簧桿”(但這不是故事;而是關于棒現(xiàn)在可以完成的事情)。研究人員對提出自己的超級機器并不感興趣。
TechCrunch寫了它的能力:(1)它可以為目標觀察表面,John Biggs寫道,以及(2)“基本上飛到了使用內(nèi)置螺旋槳需要降落的地方。”
為什么他們最近的工作很重要:一切都與控制器有關,他們進行升級以提高著陸精度 - “使用以前的控制器系統(tǒng)幾乎不可能實現(xiàn)這一壯舉,”比格斯說。
埃文·阿克曼解釋說,Salto-1P的硬件與去年相同:一條用于跳躍的驅動彈性支腿,“ 用于控制俯仰的慣性尾翼,以及用于控制偏航和俯仰的半軸四軸飛行器。” 但今年,它完全是關于控制器的。
該團隊的Salto-1P目標是一個更好的控制器,可以做出需要精確放置腳的事情。阿克曼說,“甚至更具攻擊性的行為,比如在墻壁之間跳躍,涉及整個跳躍序列都需要準確,因為單個不準確的跳躍可能會導致機器人摔倒并砸碎。”
在他們的論文中,作者討論了他們的無差距腳放置跳躍控制。那是什么意思?好吧,他們正在處理“一種新的控制算法,它可以將Salto-1P的腳放在地面上的特定位置,就像跳上踏腳石或玩單腿跳房子一樣。” 他們稱之為“無節(jié)制的腳放置控制”。
Holloway向New Atlas讀者介紹了該團隊的方法。“控制器使用數(shù)學中已知的泰勒級數(shù)近似,可用于近似復雜方程的答案,包括那些作用于一個點的力。”
最終結果:一個機器人設計成它不能只是跳躍,而是在指定的點之間跳躍,“仿佛從踩踏石跳到踏腳石或玩跳房子。” 霍洛威說,它可以在地面上跳躍,也可以在高度增加的物體之間跳躍。
他們關于這個跨越式機器人的下一步工作列表包括調(diào)查非剛性或傾斜地形對跳躍性能和控制策略的影響。此外,根據(jù)Ackerman的說法,“我們在IROS上與Justin Yim進行了交談,他告訴我們他正在努力提高Salto-1P的跳躍精度,同時還要將其從外部定位和計算系統(tǒng)中解脫出來,將其限制在室內(nèi)。”
-
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
電子工程
+關注
關注
1文章
62瀏覽量
17178
原文標題:[機器人頻道|物聯(lián)網(wǎng)]加州大學伯克利分校的團隊給予跳躍機器人更高目標
文章出處:【微信號:robovideo,微信公眾號:機器人頻道】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
NaVILA:加州大學與英偉達聯(lián)合發(fā)布新型視覺語言模型
RISC-V 與 ARM 架構的區(qū)別 RISC-V與機器學習的關系
RISC-V,即將進入應用的爆發(fā)期
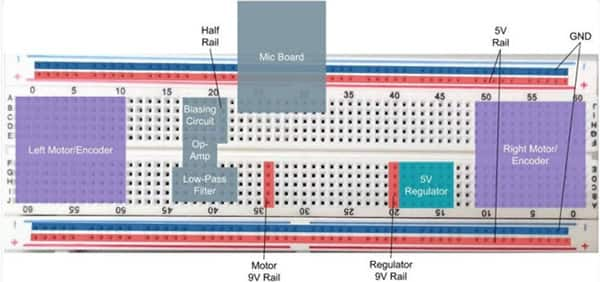
構建語音控制機器人 - 深入研究電路
AMD贊助多支FIRST機器人競賽團隊
freebsd和linux哪個好用
Al大模型機器人
南加州大學研發(fā)AI系統(tǒng):智能藥丸助力家庭腸道健康監(jiān)測
北航成功研發(fā)微尺寸仿生機器人——昆蟲機器人
主流電路仿真軟件有哪些
斯坦福、伯克利大神教授創(chuàng)業(yè)給機器人造大腦,OpenAI紅杉搶著投5億

科學家如何加速下一代微電子技術的發(fā)展
2024年人工智能在職場發(fā)展的五大趨勢
riscv開發(fā)板推薦
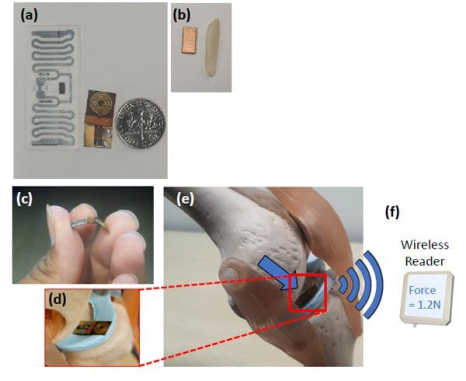
加州大學研發(fā)出RFID測力“貼紙”,重新定義精準測量





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論