") 路基自動(dòng)駕駛的內(nèi)涵與技術(shù)路線
路基自動(dòng)駕駛的內(nèi)涵與技術(shù)路線
近日,第六屆國(guó)際智能網(wǎng)聯(lián)汽車(chē)技術(shù)年會(huì)(CICV2019)在北京亦莊的亦創(chuàng)國(guó)際會(huì)展中心舉辦。會(huì)議期間,中國(guó)交建智能交通研發(fā)中心副主任朱弘戈博士針對(duì)路基自動(dòng)駕駛的內(nèi)涵與技術(shù)路線進(jìn)行了分享。
01引言
近年來(lái)自動(dòng)駕駛技術(shù)迅猛發(fā)展。目前,高級(jí)別自動(dòng)駕駛解決方案基本采用“感知-決策-執(zhí)行”鏈條。眾多知名企業(yè)對(duì)于感知的解決方案不盡相同,但無(wú)論類(lèi)似特斯拉的視頻方案還是像Waymo的激光雷達(dá)方案,這些單車(chē)感知方案均存在感知距離有限、遮擋性盲區(qū)等問(wèn)題。換言之,人工駕駛存在的問(wèn)題單車(chē)自動(dòng)駕駛解決方案依然存在,單車(chē)智能技術(shù)路線存在的問(wèn)題逐漸暴露,主要存在的問(wèn)題有:
1. 無(wú)法全面重現(xiàn)行駛環(huán)境,特別是盲區(qū)問(wèn)題;
2. 復(fù)雜場(chǎng)景下算法準(zhǔn)確率低,與人的判斷差距很大;
3. 單車(chē)制造成本居高不下,難于產(chǎn)業(yè)化發(fā)展;
4. 道路資源利用率低;
5. 特定場(chǎng)景缺乏組織調(diào)度,難于實(shí)現(xiàn)自協(xié)調(diào)。
因此,自動(dòng)駕駛技術(shù)的發(fā)展逐漸從單車(chē)智能走向車(chē)路協(xié)同。交通運(yùn)輸部高度重視自動(dòng)駕駛和車(chē)路協(xié)同等前瞻性技術(shù)的發(fā)展和應(yīng)用,提出“以智慧交通建設(shè)為載體,按照車(chē)路協(xié)同發(fā)展的技術(shù)路徑,積極推進(jìn)自動(dòng)駕駛的發(fā)展”。針對(duì)自動(dòng)駕駛、車(chē)路協(xié)同、新一代交通控制網(wǎng)等方面,部署開(kāi)展了大量的研究和開(kāi)發(fā)工作。力求形成技術(shù)研發(fā)、產(chǎn)業(yè)示范、標(biāo)準(zhǔn)支撐、良性發(fā)展格局。
02內(nèi)涵
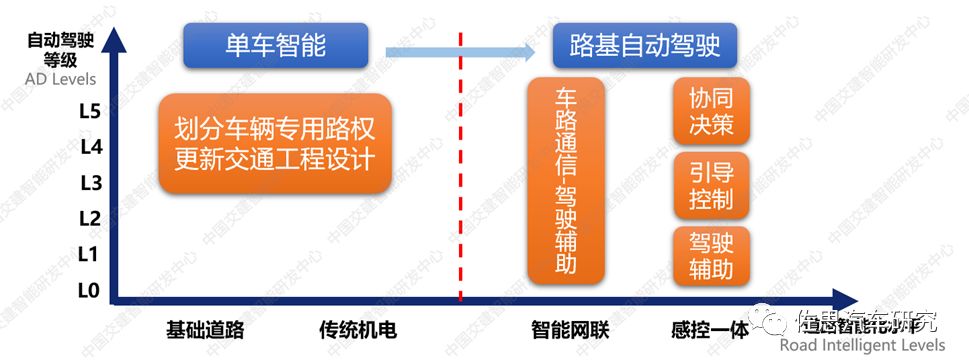
路基自動(dòng)駕駛是指基于道路的車(chē)路協(xié)同式自動(dòng)駕駛。根據(jù)道路和車(chē)輛的智能化水平劃分為不同的發(fā)展階段,實(shí)現(xiàn)車(chē)輛的自動(dòng)駕駛技術(shù)與道路智能化技術(shù)協(xié)同發(fā)展,最終形成新一代交通控制與運(yùn)行系統(tǒng),實(shí)現(xiàn)交通運(yùn)輸轉(zhuǎn)型升級(jí)。
路基自動(dòng)駕駛是以道路智能化技術(shù)(Intelligent Road Technology) 、車(chē)輛自動(dòng)駕駛技術(shù)(Autonomous Driving Technology) 、路運(yùn)一體技術(shù)(integrated control and operation technology of road and transportation) 為核心,以運(yùn)行保障體系(Operation guarantee system) 為基礎(chǔ),實(shí)現(xiàn)不同業(yè)務(wù)場(chǎng)景下的自動(dòng)駕駛。
03框架
路基自動(dòng)駕駛的體系如圖所示,多維混合交通流和柔性專(zhuān)用車(chē)道管理是路基自動(dòng)駕駛的理論基礎(chǔ)。MEC(多邊接入邊緣計(jì)算)、5G/LTE-V(車(chē)路通信技術(shù))、 Middleware(多類(lèi)型中間件)構(gòu)成了其關(guān)鍵技術(shù)的通用技術(shù)骨架。道路全息感知技術(shù)、多維融合信息發(fā)布技術(shù)和路運(yùn)耦合管控技術(shù)組成了應(yīng)用技術(shù)框架。人車(chē)在環(huán)車(chē)路協(xié)同測(cè)試是必要的測(cè)試驗(yàn)證手段。綜上,形成完整的路基自動(dòng)駕駛的技術(shù)框架。
道路全息感知與智能發(fā)布
路側(cè)感知和車(chē)側(cè)感知相互融合可以形成綜合交通環(huán)境感知體系,能夠解決單車(chē)自動(dòng)駕駛的視覺(jué)盲區(qū)問(wèn)題,同時(shí)使自動(dòng)駕駛車(chē)輛擁有了超視覺(jué)感知功能。
路側(cè)感知即道路全息感知重點(diǎn)工作在于兩個(gè)方面:一是采用更加多樣化的感知手段,二是實(shí)現(xiàn)多源時(shí)空數(shù)據(jù)的融合;進(jìn)而形成道路全息感知體系。
新技術(shù)的應(yīng)用帶來(lái)感知手段的升級(jí),例如雷達(dá)視頻融合感知、多光譜超視覺(jué)感知、激光雷達(dá)等。隨著感知手段的增多,對(duì)于多源時(shí)空數(shù)據(jù)的融合就更加關(guān)鍵。數(shù)據(jù)融合分為:數(shù)據(jù)層融合、特征層融合和決策層融合。道路多源時(shí)空數(shù)據(jù)應(yīng)該是特征層融合。
在路基自動(dòng)駕駛技術(shù)體系中,路側(cè)的多維融合信息發(fā)布技術(shù)是不可或缺的關(guān)鍵技術(shù)之一。多維,是信息發(fā)布的機(jī)制和對(duì)象兩個(gè)維度相互疊加,如圖所示。
在以無(wú)人駕駛為發(fā)展目標(biāo)的技術(shù)演進(jìn)過(guò)程中,信息應(yīng)該是經(jīng)過(guò)梳理,逐漸分化為駕駛?cè)私邮艿男畔⒑蛙?chē)輛控制系統(tǒng)接受的信息,另一方面,從信息的推送機(jī)制上,應(yīng)該分為區(qū)域廣播信息和精準(zhǔn)推送的個(gè)性化服務(wù)。
不同的信息在多維融合信息發(fā)布體系中就有不同的實(shí)現(xiàn)途徑,例如:受天氣影響的路面的性能,將會(huì)被區(qū)域廣播至附近行駛的車(chē)輛的控制系統(tǒng);特定車(chē)前方障礙物信息被精準(zhǔn)推送至車(chē)輛的控制系統(tǒng);行駛路徑周邊服務(wù)信息會(huì)被精準(zhǔn)地推送給駕駛?cè)恕?/p>
路運(yùn)耦合管控技術(shù)
路運(yùn)耦合管控技術(shù)旨在通過(guò)先進(jìn)的技術(shù)手段將道路和營(yíng)運(yùn)車(chē)輛進(jìn)行綜合管控。中國(guó)交建智能交通研發(fā)中心在充分調(diào)研國(guó)內(nèi)外技術(shù)發(fā)展路徑的基礎(chǔ)上結(jié)合中國(guó)交建在智能交通領(lǐng)域的產(chǎn)業(yè)發(fā)展路線,認(rèn)為路運(yùn)一體的發(fā)展進(jìn)程分為三個(gè)發(fā)展階段。這三個(gè)階段分別是:“傳統(tǒng)業(yè)務(wù)組合”階段、“路運(yùn)管控服務(wù)的深度耦合”階段、“路運(yùn)一體化協(xié)同優(yōu)化”階段。
這三個(gè)階段分別是車(chē)和路的弱耦合、中等耦合、強(qiáng)耦合階段。在不同的階段需要技術(shù)攻關(guān)的方向不盡相同。
“路運(yùn)管控服務(wù)的深度耦合”階段處于車(chē)路通信逐漸建立,車(chē)路協(xié)同技術(shù)路徑摸索中前進(jìn)的階段。應(yīng)該重點(diǎn)探索不同車(chē)輛在不同道路場(chǎng)景下的車(chē)路協(xié)同需求。“路運(yùn)一體化協(xié)同優(yōu)化”階段,則是已經(jīng)實(shí)現(xiàn)了車(chē)路協(xié)同技術(shù)的基礎(chǔ)應(yīng)用,網(wǎng)聯(lián)車(chē)具有一定密度,自動(dòng)駕駛蓬勃發(fā)展。此時(shí),可以探討通過(guò)車(chē)路互動(dòng)實(shí)現(xiàn)交通控制,實(shí)現(xiàn)車(chē)側(cè)路側(cè)的協(xié)同決策。研發(fā)中心提出了幾個(gè)重點(diǎn)攻關(guān)方向,例如:通過(guò)網(wǎng)聯(lián)車(chē)實(shí)現(xiàn)整個(gè)道路交通狀態(tài)的感知;利用網(wǎng)聯(lián)車(chē)的速度引導(dǎo),實(shí)現(xiàn)運(yùn)輸通道重點(diǎn)路段的交通流控制,使其更加平穩(wěn)高效;開(kāi)展路基自動(dòng)駕駛的落地應(yīng)用。
人車(chē)在環(huán)車(chē)路協(xié)同測(cè)試
路基自動(dòng)駕駛技術(shù)的實(shí)際應(yīng)用落地,離不開(kāi)最重要的環(huán)節(jié)——測(cè)試。目前的自動(dòng)駕駛算法需要大量的數(shù)據(jù)進(jìn)行訓(xùn)練,絕大部分廠家在路測(cè)的同時(shí)結(jié)合仿真測(cè)試以尋求最短時(shí)間內(nèi)得到最優(yōu)結(jié)果。全國(guó)各地紛紛建設(shè)智能網(wǎng)聯(lián)汽車(chē)測(cè)試基地,很多城市也都出臺(tái)了相應(yīng)的開(kāi)放道路測(cè)試條例。但是封閉的測(cè)試場(chǎng)地沒(méi)有真實(shí)的道路環(huán)境,開(kāi)放的測(cè)試區(qū)域又往往都是交通量小、交通場(chǎng)景簡(jiǎn)單的區(qū)域。測(cè)試多維混合流條件下的車(chē)輛的系統(tǒng)穩(wěn)定性和行駛安全性是十分困難的。
人車(chē)在環(huán)車(chē)路協(xié)同測(cè)試系統(tǒng),利用真實(shí)數(shù)據(jù)在虛擬環(huán)境中建立對(duì)應(yīng)的仿真測(cè)試環(huán)境,進(jìn)行測(cè)試和評(píng)價(jià)。通過(guò)實(shí)際地圖數(shù)據(jù)搭建仿真環(huán)境中的測(cè)試路網(wǎng),根據(jù)實(shí)測(cè)的交通檢測(cè)器數(shù)據(jù)在仿真環(huán)境中還原真實(shí)交通狀態(tài),將控制算法寫(xiě)入虛擬控制中心內(nèi),通過(guò)通信模塊實(shí)時(shí)獲取測(cè)試車(chē)輛數(shù)據(jù),即可實(shí)現(xiàn)控制算法的測(cè)試。
04應(yīng)用
多維混合交通流將長(zhǎng)期存在
交通技術(shù)一定要首先明確交通的組成,要深入剖析該技術(shù)的應(yīng)用背景,才能夠判斷理論技術(shù)與實(shí)際應(yīng)用的匹配程度。隨著技術(shù)的發(fā)展,汽車(chē)將由人工駕駛&非網(wǎng)聯(lián)階段轉(zhuǎn)變?yōu)闊o(wú)人駕駛&網(wǎng)聯(lián)階段。但是技術(shù)演進(jìn)逐漸分化為不同路線,部分車(chē)輛向網(wǎng)聯(lián)化遷移,另一部分向無(wú)人駕駛遷移。因此,多維混合交通流將長(zhǎng)期存在。
在混合交通中,由于不同車(chē)輛的動(dòng)力特性,行駛速度,安全需求等特點(diǎn)不同,造成了極其復(fù)雜的交通環(huán)境。多維混合交通流的運(yùn)行特性與單一車(chē)流存在較大的差異。
專(zhuān)用車(chē)道管理是多維混合交通流階段的必由之路
專(zhuān)用車(chē)道管理能夠從時(shí)間、空間的不同維度進(jìn)行路權(quán)劃分,保證部分車(chē)輛的優(yōu)先通行權(quán),目前典型應(yīng)用常見(jiàn)于公交車(chē)專(zhuān)用道、HOV專(zhuān)用車(chē)道、有軌電車(chē)專(zhuān)用道、擁堵區(qū)車(chē)道劃分等領(lǐng)域。但是在車(chē)路協(xié)同的技術(shù)背景下,隨著技術(shù)的不斷發(fā)展,專(zhuān)用車(chē)道的管理由時(shí)間空間靜態(tài)劃分轉(zhuǎn)變成為柔性動(dòng)態(tài)劃分成為可能。
柔性車(chē)道管理技術(shù)是一種動(dòng)態(tài)的專(zhuān)用道管理技術(shù)。這種技術(shù)摒棄了傳統(tǒng)環(huán)境下的剛性的管理,而是基于車(chē)路協(xié)同的環(huán)境充分挖掘道路的利用空間,用柔性的管理平衡系統(tǒng)最優(yōu)和用戶最優(yōu)兩種選擇。
柔性動(dòng)態(tài)的管理手段有清空距離劃分、時(shí)段劃分、應(yīng)急狀態(tài)劃分。采用柔性專(zhuān)用道管理技術(shù)可以
1.提高專(zhuān)用道時(shí)空資源利用率
2.實(shí)現(xiàn)特殊車(chē)輛快速通行
3.保障特殊車(chē)輛行程時(shí)間穩(wěn)定性
05結(jié)語(yǔ)
隨著路基自動(dòng)駕駛技術(shù)的逐漸推廣,應(yīng)急管理、交通事件管理、惡劣天氣、施工占道等領(lǐng)域都會(huì)產(chǎn)生變革。運(yùn)行保障措施得到進(jìn)一步升級(jí)。例如,利用道路全息感知技術(shù),第一時(shí)間感知交通事件,判斷類(lèi)型和嚴(yán)重程度,協(xié)同規(guī)劃決策,讓救援車(chē)輛以最快速度到達(dá)現(xiàn)場(chǎng),實(shí)現(xiàn)快速精準(zhǔn)救援。
基于運(yùn)行保障體系,面向應(yīng)用業(yè)務(wù)場(chǎng)景,應(yīng)用路基自動(dòng)駕駛技術(shù),一定可以實(shí)現(xiàn)交通運(yùn)輸行業(yè)的全面升級(jí),提升運(yùn)輸效率、降低運(yùn)輸成本、保障運(yùn)營(yíng)安全。中國(guó)交建智能交通研發(fā)中心將繼續(xù)深入研究和攻關(guān)各項(xiàng)關(guān)鍵技術(shù),積極與行業(yè)內(nèi)伙伴誠(chéng)摯合作,共同推進(jìn)新一代智能交通運(yùn)輸系統(tǒng)的發(fā)展。
-
傳感器
+關(guān)注
關(guān)注
2551文章
51163瀏覽量
754114 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13838瀏覽量
166525
原文標(biāo)題:路基自動(dòng)駕駛的內(nèi)涵與技術(shù)路線
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

MEMS技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用
自動(dòng)駕駛汽車(chē)安全嗎?


自動(dòng)駕駛HiL測(cè)試方案案例分析--ADS HiL測(cè)試系統(tǒng)#ADAS #自動(dòng)駕駛 #VTHiL
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛識(shí)別技術(shù)有哪些
自動(dòng)駕駛的傳感器技術(shù)介紹
自動(dòng)駕駛雷達(dá)15W高導(dǎo)熱絕緣片

小馬智行首批開(kāi)啟北京南站自動(dòng)駕駛測(cè)試

未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
發(fā)展新質(zhì)生產(chǎn)力,百度蘿卜快跑開(kāi)啟大興機(jī)場(chǎng)的自動(dòng)駕駛接駁路線






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論